") 如何將灰度圖轉(zhuǎn)為3D點(diǎn)云
如何將灰度圖轉(zhuǎn)為3D點(diǎn)云
1. 如何將灰度圖轉(zhuǎn)為3D點(diǎn)云
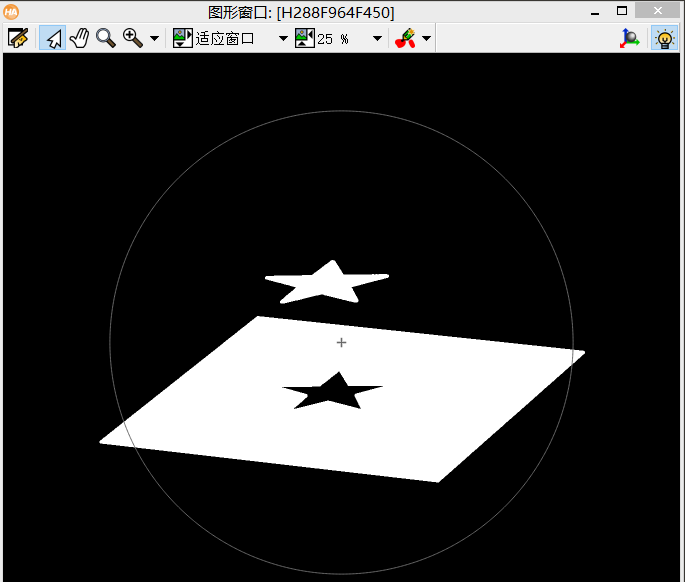
這里所說的灰度圖轉(zhuǎn)為3D點(diǎn)云,其實(shí)是將灰度圖像每個(gè)像素的行列坐標(biāo)作為3D點(diǎn)云的X,Y坐標(biāo),像素的灰度值(0—255)作為三維點(diǎn)的Z坐標(biāo)。
簡單說就是將一張灰度圖像拆成了三個(gè)數(shù)組:X,Y,Z,然后將這三個(gè)數(shù)組轉(zhuǎn)為點(diǎn)云。
halcon代碼:
dev_get_window (WindowHandle)read_image (Image, '1.bmp')rgb1_to_gray (Image, GrayImage)*獲取圖像尺寸get_image_size (GrayImage, Width, Height)gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)*從區(qū)域生成所有的像素坐標(biāo)get_region_points(Rectangle, X, Y)*讀取圖像的全部像素get_grayval(GrayImage, X, Y, Z)*創(chuàng)建3D對象模型gen_object_model_3d_from_points(X, Y, Z, ObjectModel3D)*顯示3D模型visualize_object_model_3d (WindowHandle,ObjectModel3D , [], [], [], [], [], [], [], PoseOut)
2. 創(chuàng)建一張深度圖
實(shí)際上深度圖是使用X,Y,Z三個(gè)數(shù)組的數(shù)據(jù)創(chuàng)建來的;
X,Y是作為圖像的行列坐標(biāo),Z是實(shí)數(shù)(表示的是深度/高度),而不是灰度,因?yàn)榛叶戎凳?——255之間的整數(shù);
Z的值是能夠返回高度信息的傳感器獲取到的,比如點(diǎn)激光、線激光,結(jié)構(gòu)光等。
下面是自己賦值得到的一張深度圖。
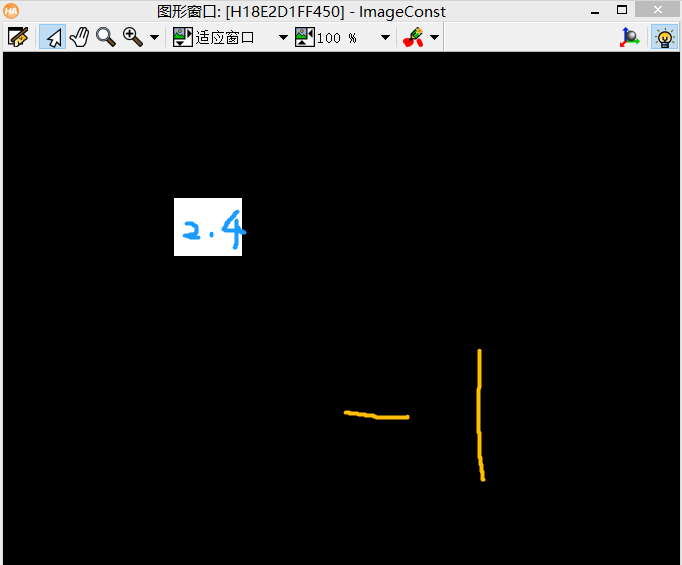
dev_get_window (WindowHandle)read_image (Image, '2.bmp')rgb1_to_gray (Image, GrayImage)*獲取圖像尺寸get_image_size (GrayImage, Width, Height)gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)*從區(qū)域生成所有的像素坐標(biāo)get_region_points(Rectangle, X, Y)*讀取圖像的全部像素get_grayval(GrayImage, X, Y, Z)*改變Z的值Z:=Z-256*對在Rectangle2區(qū)域中的像素進(jìn)行賦值gen_rectangle1 (Rectangle2, 101, 101, 140,140)get_region_points(Rectangle2, X2, Y2)Z[X2*400+Y2]:=2.4*創(chuàng)建一張類型為'real'的圖像gen_image_const (ImageConst, 'real', Width, Height)*使用X,Y,Z給圖像賦值A(chǔ)set_grayval (ImageConst, X, Y, Z)
3. 深度圖轉(zhuǎn)點(diǎn)云、點(diǎn)云轉(zhuǎn)深度圖
接下來我們加載一張真正的深度圖,它是由線激光采集數(shù)據(jù)得到的,保存格式為tiff文件;
這是截取了其中一段圖像,掃描的是電路板上一些元器件和焊點(diǎn)的高度。
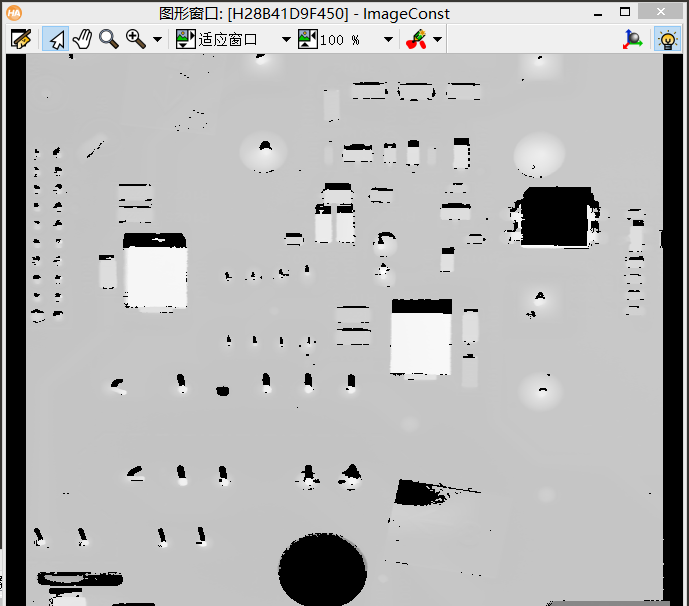
read_image (Image, '3DImage1.tiff')get_image_size (Image, Width, Height)*1. 這一步是將灰度圖轉(zhuǎn)為了X,Y,Z三個(gè)數(shù)組,當(dāng)然也就可以轉(zhuǎn)為三位點(diǎn)云了*獲取圖像尺寸get_image_size (Image, Width, Height)gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)*從區(qū)域生成所有的像素坐標(biāo)get_region_points(Rectangle, X, Y)*讀取圖像的全部像素get_grayval(Image, X, Y, Z)*2. 再將X,Y,Z這三個(gè)數(shù)組轉(zhuǎn)回深度圖,實(shí)際應(yīng)用中,線機(jī)光返回的數(shù)據(jù)就是Z數(shù)組,X,Y數(shù)組由自己創(chuàng)建*創(chuàng)建一個(gè)空圖像,注意type選擇'real'gen_image_const (ImageConst, 'real', Width, Height)*然后使用數(shù)組填充圖像,這樣就完成了set_grayval (ImageConst, X, Y, Z)*3. 接下來就可以對深度圖做進(jìn)一步處理了。。。
4. 代碼和圖片下載地址
https://download.csdn.net/download/weixin_38566632/19765495
審核編輯 :李倩
-
3D
+關(guān)注
關(guān)注
9文章
2899瀏覽量
107709 -
數(shù)組
+關(guān)注
關(guān)注
1文章
417瀏覽量
25990 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3806
原文標(biāo)題:Halcon 3D點(diǎn)云和深度圖的相互轉(zhuǎn)化
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
C#通過Halcon實(shí)現(xiàn)3D點(diǎn)云重繪
3D掃描技術(shù)醫(yī)療領(lǐng)域創(chuàng)新實(shí)踐,積木易搭3D掃描儀Mole助力定制個(gè)性化手臂康復(fù)輔具
3D封裝熱設(shè)計(jì):挑戰(zhàn)與機(jī)遇并存

裸眼3D筆記本電腦——先進(jìn)的光場裸眼3D技術(shù)
3D建模的重要內(nèi)容和應(yīng)用
友思特案例 | 自研創(chuàng)新!三維工件尺寸測量及點(diǎn)云處理解決方案

3D建模的特點(diǎn)和優(yōu)勢都有哪些?
PADS2.7,如何將3D封裝與PCB封裝綁定,然后再PCB設(shè)計(jì)時(shí)可直接調(diào)用?
機(jī)器人3D視覺引導(dǎo)系統(tǒng)框架介紹

新質(zhì)生產(chǎn)力探索| AICG浪潮下的3D打印與3D掃描技術(shù)
包含具有多種類型信息的3D模型
基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類應(yīng)用

高分工作!Uni3D:3D基礎(chǔ)大模型,刷新多個(gè)SOTA!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論