 ADS2.0算法演進與對算力的新需求
ADS2.0算法演進與對算力的新需求
愛因斯坦有曰,“瀚宇初開,萬物當生也。萬物可謂振動,能光旋律之蕩漾焉。”(注:作者中譯)。AI新技術革命時代,大算力芯片也撥響了自動駕駛ADS的琴弦。大珠小珠般的AI算法在大算力驅動下應運而振,應時而動,解決了ADS從L2到L5逐級演進中的眾多技術難題。ADS每增加一級,算力需求也會呈現十倍速上升,L4級別可預計的算力需求在1000TOPS,L5級別估計在2000-10000TOPS。如圖1所示,后摩爾時代工藝更新性能提升放緩,延續性創新的邊際效益遞減,新興的大算力架構在不斷涌現,加上駕駛AI算法高速迭代演進,在未來5-10年內可能會為后來的技術追趕者提供非常奇妙的一個直線超車的機會窗口。
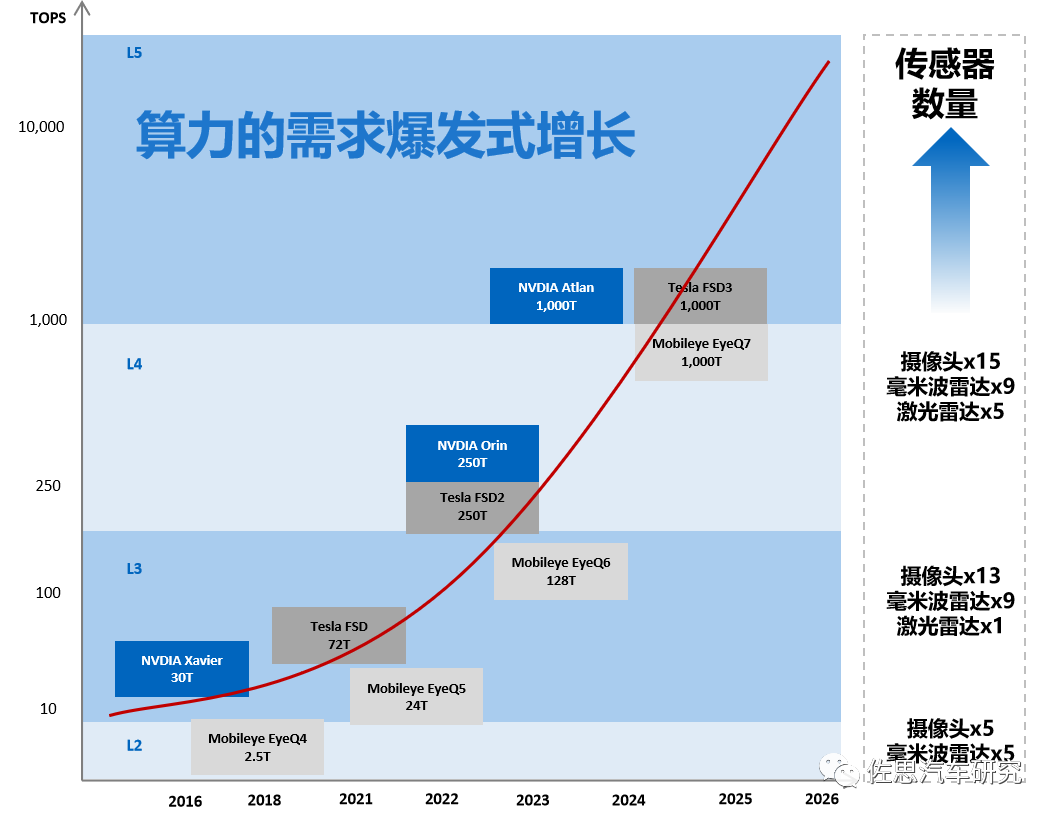
圖1. 大算力時代自動駕駛ADS領域的機遇與挑戰
當前ADS自動駕駛采用決策層后融合的方式,其局限性主要表現在在極端惡劣氣候與復雜遮擋等不確定性場景下分別進行單模結構化信息提取后再進行融合決策,每個通道信息會有不同層面丟失,很難能夠進行多模有效互補與特征提取共享,算力內卷且性能遠低于預期。 未來ADS算法會進入一個全新的2.0階段,4D空間下基于時空的多模感知與融合推理, 也就是特征提取/統計推斷/應急預測相結合,實現在動態復雜的有噪聲干擾等場景下,全程安全無碰撞的高效行駛。挑戰可以體現在,動態隨機的人車物交互,多變天氣路況,以及突發交通事件等。
ADS算法2.0從決策層后融合走向特征級前融合,當前行業ADS2.0算法主要演進方向為:
多模感知:主要是針對Camera/LiDAR/Radar海量數據流進行特征提取,DL網絡主流趨勢是卷積CNN或者貝葉斯NN+Transformer的組合架構,在統一的特征空間實現多模感知,特征融合共享以及多任務來提升算力的整體效率。
融合推理:主要是基于模型與基于數據的雙學習模式,DL網絡主流趨勢是基于目標交互GNN或基于統計模型的貝葉斯RL強化學習或On-Policy應急學習,實現ADS安全可信的預測規劃與控制。
ADS2.0算法演進與對算力的新需求,可以總結為:
演進趨勢1:感知定位預測決策控制模塊化處理流程中, 從決策層后融合走向感知層前融合,算法能夠在統一空間支持多模融合,多任務共享;
演進趨勢2:預測與規劃聯合建模,從可獲得的Off-policy數據進行學習,能夠自學習處理不確定性下的安全性問題,解決可解釋問題,持續學習解決新場景問題;
算力新需求:從compute-bound(矩陣-矩陣乘)走向memory-bound(矩陣-矢量乘),從偏計算走向偏存取。
當前市場上主流算力NPU芯片,都存在幾個共性問題,一是算法效率低,多數只針對CNN(例如3x3卷積)優化;二是內存墻問題:處理單元PE存算分離,數據共享難;三是能耗墻問題:數據重復搬移,耗能增加>30-70%。所以,當前針對某些特定算法的芯片,無法解決未來ADS 2.0的需求。
從工程實踐上看,ADS 2.0算法需通過“硬件預埋,算法迭代,算力均衡”,提供一個向前兼容的解決方案,以通用大算力(CPU的5-10倍性能提升,NPU的100-500倍性能提升)來解決未來不確定性的算法演進:
底層架構的演進:從存算分離過渡到近內存計算,最終走向內存計算;
數據通道與模型:高速數據接口;數據壓縮+模型壓縮+低精度逼近計算+稀疏計算加速;
并行的頂層架構:模型-硬件聯合設計,以及硬設計可配置+硬件調度+軟運行可編程調度引擎。
未來,自動駕駛算法不會止步于ADS 2.0,而能夠真正支持人類自動駕駛夢想的算法ADS 3.0趨勢,我們估計會采用一個DNN網絡來進行端到端學習。設想一下,有足夠的專家駕駛數據用來做模仿學習或采用RL自學習模式,可以有效降低數據標注的信息瓶頸與嚴重依賴,從而能夠從多模多樣化數據層面進行非直接的推理或者博弈類的對抗學習。ADS 3.0目前來看模型的可信與可解釋程度依然遠低于預期。ADS系統的總體演進趨勢,可以總結為:
場景演進:負載多樣性
?從數量有限的攝像頭設置走向 Camera + LiDAR + Radar 多模態組合。
趨勢演進:算法多樣性
?從CNN+Rule-based方案走向CNN, RNN,Transformer, GNN, Bayesian, Deep ReinforcementLearning, Dynamic DNN, NAS Generated DNN, Variably Quantized DNN多算法組合。
大算力時代,ADS系統首先是模仿人類的駕駛行為,通過注意力機制,期望在感知定位預測規劃控制領域提供遠超人類的決策能力。這需要我們在AI的三要素(算法、算力、數據)基礎上添加第四要素,知識或者常識。

而上述要素,均需要在充分理解算法的快速迭代的大趨勢下,擁有充足的超大通用算力,ADS系統在離線模仿學習人類駕駛先驗知識經驗與規則的基礎上,能夠提供在線自主學習能力,通過自學習激勵與博弈共贏策略應對眾多不確定性的人機交互的復雜環境,能夠對決策不充分的場景下做到安全應對和提供可信解釋能力。此外,大算力芯片也需要能夠通過額外的算力,對芯片內百萬級的并行計算單元提供故障檢測與安全規避能力,對大量多模傳感器的部分或者完全失效進行有效檢測與應對決策處理,對駕駛環境針對傳感器的主動攻擊與外界目標非主動干擾進行有效檢測與實時決策處理。
審核編輯 :李倩
-
算法
+關注
關注
23文章
4623瀏覽量
93105 -
ADS1220
+關注
關注
24文章
488瀏覽量
125211 -
自動駕駛
+關注
關注
784文章
13896瀏覽量
166694
原文標題:自動駕駛行業快速迭代演變的算法和算力淺論
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
澎峰科技助力中國移動 重磅發布智算“芯合”算力原生基礎軟件棧2.0

澎峰科技助力中國移動發布智算“芯合”算力原生基礎軟件棧2.0
【「算力芯片 | 高性能 CPU/GPU/NPU 微架構分析」閱讀體驗】--全書概覽
大模型時代的算力需求
摩爾線程張建中:以國產算力助力數智世界,滿足大模型算力需求
算力系列基礎篇——算力101:從零開始了解算力

液冷是大模型對算力需求的必然選擇?|英偉達 GTC 2024六大亮點

算力簡史,是一段波瀾壯闊的歷史

Sora爆火引全球算力需求激增?賽思時間同步技術使算力如虎添翼!

Sora算力需求引發業界對集結國內AI企業算力的探討






 工商網監
工商網監
評論