 基于無人機激光雷達的刺槐人工林森林健康指標的構建
基于無人機激光雷達的刺槐人工林森林健康指標的構建
1研究區概況
黃河三角洲位于渤海灣南岸和萊州灣西岸,主要分布在中國山東省東營市和濱州市境內,屬暖溫帶半濕潤大陸性季風氣候,年平均氣溫11.7~12.6℃,日照充足,雨熱同期。該地區土壤以濱海鹽土和濱海潮土為主,養分含量低,且鹽漬化嚴重,不利于喬木生長。自20世紀80年代以來,刺槐作為主要的造林樹種在該地區廣泛種植,逐漸形成以孤島、軍馬場、黃河故道和大汶流自然保護區4個林場為主體的種植區。本研究以孤島林場為研究區(圖1)。
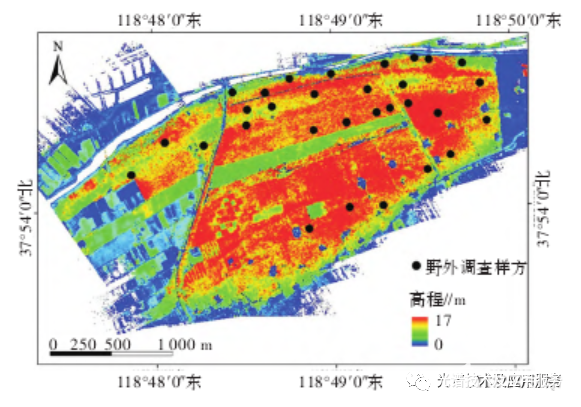
圖1研究區及樣方分布(以LiDAR數據為背景)
2材料與方法
2.1數據,
2.1.1野外生態調查數據
本研究于2017年6月、2019年6月和2019年10月共獲取了30個野外調查樣方。根據兩級采樣設計原則,在30m×30m的樣方的4個角和中心布置了5個10m×10m的次樣方。利用GPS記錄每個樣方的位置。根據美國林業局樹冠狀況分類指南對樣方進行健康分級,具體方法如下:在5個次樣方中選擇1個標準木材評估5個樹冠活力指標,分別為活冠比、冠幅、郁閉度、林冠枯梢率、樹葉透光度(表1),取5個次樣方指標的平均值作為樣方的指標值,最后根據森林健康等級判斷規則(表2)得到樣方的健康等級。30個樣方被分為3類,包括14個健康樣方、10個亞健康樣方和6個不健康樣方。
2.1.2無人機LiDAR數據
本研究于2017年6月采集了黃河三角洲孤島林場區域的無人機LiDAR數據。無人機上搭載激光掃描儀、IMU(Inertialmeasurementunit)和GPS(Globalposi?tionsystem),飛行高度為120m,飛行速度為4.8m/s,巡航半徑為2km。激光波長采用近紅外波段,光斑直徑約為50mm,獲取的平均點密度為40個/m2,采用WGS84坐標系和UTM投影。
2.2LiDAR數據預處理
首先采用基于統計的點云去噪方法(Statisticaloutlierremoval)對原始的無人機LiDAR數據進行去噪。然后通過改進的漸進三角網加密算法(IPTD)對去噪后的LiDAR點云進行濾波,將點云分為地面點和非地面點。利用地面點插值生成數字地形模型DTM,并用DTM對點云數據進行歸一化消除地形的影響。再利用歸一化后的點云生成數字表面模型DSM,減去DTM得到冠層高度模型CHM。本研究為了獲取詳細的冠層變化,將CHM的空間分辨率設置為1m2。
2.3LiDAR特征變量提取
2.3.1垂直方向的變量
本研究的垂直變量分為2個部分,包括基于歸一化LiDAR點云中提取的特征變量和基于冠層垂直剖面提取的特征變量。基于點云提取的變量包括3個。高度百分位數(H99)是所有回波點按高度排序后,99%的點云所在的高度,可以從整體上反映樣方內樹木的高度。垂直復雜度(VCI)可以量化點云的垂直分布,其數值區間為0~1,0表示點云在垂直方向上分布不均勻,1表示分布均勻,公式為:
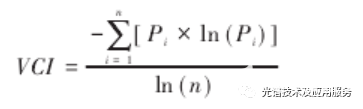
式中,n為垂直方向上劃分的高度層數,Pi為每個高程層中點云占點云總數的比例(%)。葉面積密度的變異系數(LADcv)可以反映冠層內葉面積指數隨高度變化的變異情況,公式為:
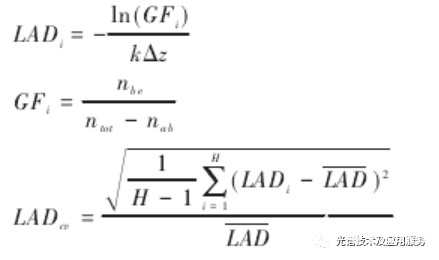
式中,H為垂直方向劃分的高度層數,GF為間隙率,k為消光系數,nab為第i個高度層以上的點云數量,nbe為第i個高度層以下的點云數量,ntot為點云總數。冠層垂直剖面可以反映包括枝葉在內的整個樹冠在垂直方向上的點云密度分布情況,由某一高度層的點云與點云總數的比值表示。本研究采用Weibull密度函數擬合冠層垂直剖面,以獲取尺度參數α(weibull_α)和形狀參數β(weibull_β),公式為:

式中,f(x)是點云密度,x是高度百分位數。
2.3.2水平方向的變量
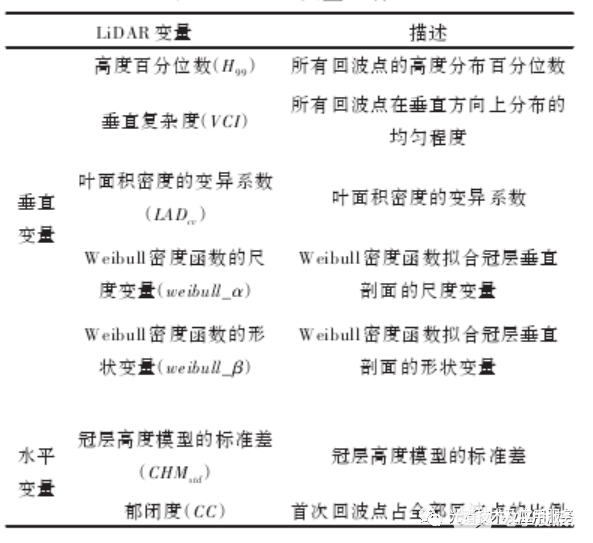
冠層高度模型CHM描述了樹冠的表面形態。樹木枯梢會增加激光脈沖的穿透率,并在CHM的水平方向產生不同大小的不規則斑塊,因此可以通過CHM的標準差(CHMstd)反映冠層的稀疏程度以及落葉情況。郁閉度(CC)是反映林分質量的重要參數,是冠層垂直投影與林地面積之比。使用LiDAR估測郁閉度時,常用首次回波點與所有回波點的比值表示。提取的變量及其具體描述見表3。
表3LiDAR變量及描述
2.4森林健康指標構建
本研究采用Person’s相關系數度量LiDAR變量之間的關系,從而確定能夠全面且系統地反映森林健康狀況的關鍵LiDAR變量。先通過層次聚類的類平均法對LiDAR變量進行聚類,把相關性相似的變量歸為一類;再根據類別內相關系數最大(能代表所在類的所有指標)、類別間相關系數最小(與其他類的指標相關性最低)的原則,在每一類中只選取一個變量作為關鍵變量構成森林健康指標。為了探究森林健康指標在解釋森林健康狀況時的機理,采用無監督的層次聚類法將每個指標分為3類,分別對應刺槐健康等級中的健康、亞健康、不健康。最后根據每個指標的聚類結果,以類邊界處的中值作為閾值,構建森林健康指標的分級閾值。與美國林業局樹冠狀況分類指南類似,本研究基于森林健康指標制定了森林健康等級的判斷規則,即識別1個樣方是否滿足健康或不健康的規則,若不符合這2個等級則被視為亞健康。據此對研究區的刺槐林進行森林健康等級判斷,采用總精度和Kappa系數對判斷結果進行評價。
3結果與分析
3.1LiDAR變量分析
根據LiDAR變量的Person’s相關系數(圖2)將其分為4類。LADcv和weibull_α分別單獨作為一類(與其他變量相關性低),CHMstd和H99為一類(r=0.84),weibull_β、CC、VCI為一類,相關系數為0.64~0.94。隨后根據選取原則,分別在后2個類別中選取H99和VCI。最終得到由LADcv、weibull_α、H99和VCI4個變量組成的森林健康指標。
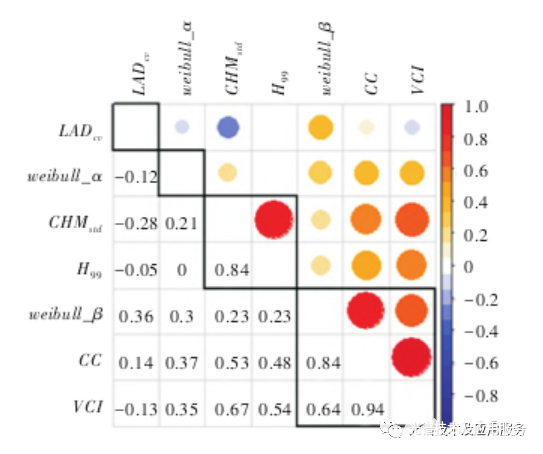
圖2LiDAR變量的相關矩陣圖
3.3刺槐人工林的健康判斷與評價
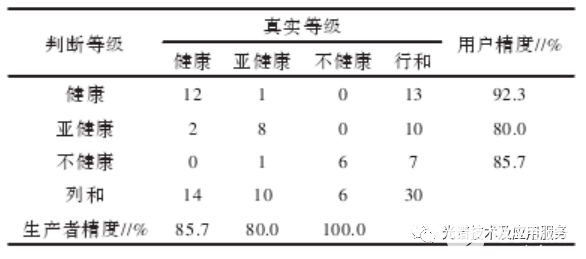
基于上述森林健康指標對研究區的30個樣方進行健康等級判斷,通過與野外調查結果比較,可知分類的總精度為86.7%,Kappa系數為0.79,對判斷結果的評價如表6所示。由表6可知,健康等級之間的混淆主要出現在健康樣方和亞健康樣方之間,健康樣方的生產者精度為85.7%,說明14.3%的健康樣方被錯分為亞健康樣方,用戶精度為92.3%,說明7.7%的亞健康樣方被錯分為健康樣方;亞健康樣方的生產者精度為80.0%,有20.0%的亞健康樣方被錯分為健康或不健康樣方;用戶精度為80.0%,說明有20.0%的健康樣方被錯分為亞健康樣方;重度枯梢刺槐樣方的生產者精度為100.0%,而用戶精度為85.7%,說明不健康樣方均被正確識別,但是有14.3%的亞健康樣方被錯分為不健康。因此森林健康指標識別健康和不健康樣方有較大優勢,但對亞健康樣方的識別精度有待提高。
表6基于森林健康指標的刺槐森林健康等級精度評價
4討論與結論
4.1討論
黃河三角洲刺槐林的生長主要受長期土壤鹽漬化的脅迫,整體生長狀況不佳,不同退化程度導致刺槐林的樹高、郁閉度情況存在差異。本研究利用LiDAR數據從樹冠結構角度對其健康狀況進行判別,獲得了較理想的效果,主要是由于發生退化的刺槐多表現為落葉或樹木低矮,很少表現為樹冠枯黃變色。但是對于那些樹葉變黃但還沒有掉落的樹木,僅從結構角度判斷仍存在缺陷,此時利用光譜信息可以檢測到這種變化。葉片變黃是因為葉綠素含量減少,會在525~565nm(綠色)、690~730nm(紅邊)和730~760nm(近紅外)區域發生顯著變化。森林健康是植被結構和葉片化學特征的函數,植被結構指樹冠的變化,而葉片化學特征是指各種色素的含量。因此,在今后的研究中可以把能描述樹冠三維結構的LiDAR技術與能反映樹葉生化特征的高光學遙感技術結合起來,將有助于提高對森林健康等級的識別精度。
4.2結論
本研究以黃河三角洲孤島林場的刺槐林為研究對象,利用無人機LiDAR數據提取表征植被垂直和水平變化的LiDAR特征變量,并通過聚類分析構建森林健康指標,得到以下結論:①森林健康指標包括LADcv、weibull_α、H99和VCI,分別從樹葉茂密程度、樹冠形狀、樹高、植被垂直分布4個方面對森林健康狀況進行評價;②森林健康指標能有效識別出健康和不健康的刺槐林,對亞健康刺槐林的識別精度有待提高,總體上的分類精度較理想(總精度為86.7%,Kappa系數為0.79),說明激光雷達技術可以在判斷森林健康狀況方面發揮重要作用。今后的研究中可與高光譜信息結合起來,構建更為完善的森林健康指標。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯:符乾江
-
無人機
+關注
關注
230文章
10493瀏覽量
181487 -
激光雷達
+關注
關注
968文章
4003瀏覽量
190176
發布評論請先 登錄
相關推薦
海外首款由激光雷達驅動的無人機發布
激光雷達技術或可助力防御無人機
激光雷達技術的基于深度學習的進步
激光雷達在無人機中的應用實例
激光雷達技術的發展趨勢
鐳神智能激光雷達低空無人機目標追蹤光電系統:筑牢機場低空安防屏障

愛普生IMU產品在激光雷達測繪中的應用

基于FPGA的激光雷達控制板

激光雷達的應用場景
激光雷達的探測技術介紹 機載激光雷達發展歷程






 工商網監
工商網監
評論