") 解決自動(dòng)駕駛的關(guān)鍵挑戰(zhàn)
解決自動(dòng)駕駛的關(guān)鍵挑戰(zhàn)
“自動(dòng)駕駛”技術(shù)建立在特定的駕駛員輔助功能之上,例如自適應(yīng)巡航控制或防撞、臨時(shí)監(jiān)督自動(dòng)駕駛儀,以及完全自動(dòng)駕駛車輛,能夠在完全沒有人為干預(yù)的情況下從頭到尾完成旅程。
美國汽車工程師協(xié)會(huì) (SAE) 定義的五個(gè)自動(dòng)駕駛級(jí)別(圖 1)有助于將機(jī)器參與駕駛車輛的程度日益提高,更重要的是,也許是未來。
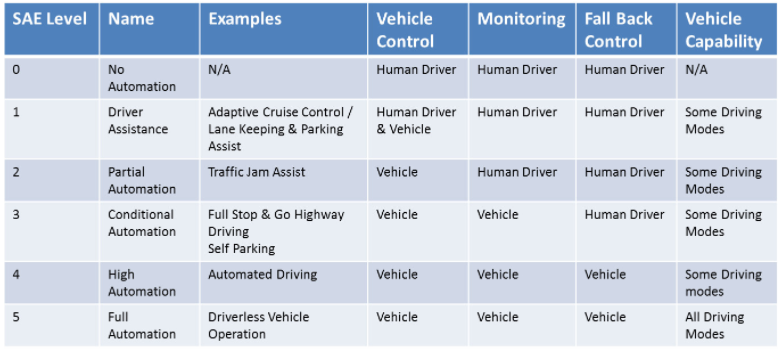
圖 1.美國 SAE 定義的 SAE 汽車自主級(jí)別。
通過這些不同的級(jí)別,顯然需要越來越準(zhǔn)確的態(tài)勢(shì)感知。物體識(shí)別、空間感知和定位等任務(wù)是人類的核心技能,由于摩爾定律在芯片處理能力與成本和功耗之間的關(guān)系,現(xiàn)在才開始克服在機(jī)器中復(fù)制這些任務(wù)的挑戰(zhàn)。
然而,得益于這一進(jìn)步,最高水平的全自動(dòng)駕駛汽車觸手可及。事實(shí)上,一些備受矚目的自動(dòng)駕駛汽車項(xiàng)目已經(jīng)完成了超過 100 萬英里的全自動(dòng)駕駛,僅記錄了少數(shù)事故。
基于改善道路安全的理由,自動(dòng)駕駛汽車有充分的理由。由于超過 80% 的道路交通事故是由人為錯(cuò)誤造成的,因此取消人為決策可能會(huì)降低事故率。挑戰(zhàn)在于消除人為錯(cuò)誤,而不會(huì)引入不可接受的機(jī)器錯(cuò)誤水平。在這個(gè)最神圣的人類活動(dòng)中,對(duì)機(jī)器錯(cuò)誤的容忍度將是極低的。
必須在確保設(shè)計(jì)及其所有元素安全的框架內(nèi)開發(fā)更高 SAE 級(jí)別的自動(dòng)駕駛系統(tǒng)。汽車安全標(biāo)準(zhǔn) ISO 26262 通過定義一組汽車安全完整性等級(jí) (ASIL) 和相關(guān)的允許故障率,提供了任何自主系統(tǒng)開發(fā)必須遵守的框架。此外,未來車輛上的自動(dòng)駕駛系統(tǒng)也將受到從熱帶高溫到北極寒冷等一系列惡劣環(huán)境的影響,包括發(fā)動(dòng)機(jī)高溫、熱循環(huán)、高振動(dòng)、沖擊、濕度、灰塵等,挑戰(zhàn)可操作性和可靠性。因此,除了極其強(qiáng)大、快速和節(jié)能之外,
多種傳感方式——系統(tǒng)的眼睛、耳朵等
就像人類駕駛員依靠視覺信息以及聲音、身體上的力甚至嗅覺來在各種環(huán)境中控制車輛并預(yù)測(cè)事件一樣,自主系統(tǒng)依靠多種傳感方式來提供原始數(shù)據(jù)用于決策。該機(jī)器比人類有一個(gè)優(yōu)勢(shì),因?yàn)樗梢蕴峁└嗟母泄賮碓鰪?qiáng)在視覺光譜中工作的相機(jī)和類似于人類平衡、運(yùn)動(dòng)和定位感覺的慣性傳感器。這些包括雷達(dá)、激光雷達(dá)、超聲波、紅外線、GPS 以及無線 V2X 數(shù)據(jù),可以提供對(duì)看不見的危險(xiǎn)的意識(shí)。
在所有這些傳感模式(系統(tǒng)的眼睛、耳朵等)的連接處,是一個(gè)中央處理模塊 (CPM),它必須根據(jù)來自各個(gè)通道的所有數(shù)據(jù)流連續(xù)做出實(shí)時(shí)決策。正是這個(gè)模塊的能力定義了系統(tǒng)能力的限制,就可以安全執(zhí)行的自動(dòng)駕駛模式而言。
處理系統(tǒng)架構(gòu)
圖 2 說明了 CPM 將原始傳感器數(shù)據(jù)轉(zhuǎn)換為安全且適當(dāng)?shù)淖詣?dòng)駕駛決策所需的功能。
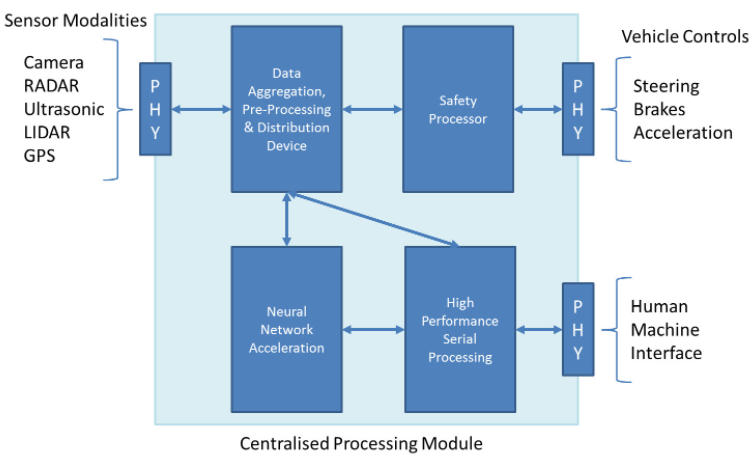
圖 2. 自動(dòng)駕駛和全自動(dòng)駕駛汽車的集中處理模塊架構(gòu)。
在顯示的功能中,數(shù)據(jù)聚合、預(yù)處理和分發(fā) (DAPD) 塊與不同的傳感器模式接口,以在處理單元和處理單元內(nèi)的加速器之間執(zhí)行基本處理、路由和信息交換。
高性能串行處理根據(jù)其輸入執(zhí)行數(shù)據(jù)提取、傳感器融合和高級(jí)決策。在某些應(yīng)用中,神經(jīng)網(wǎng)絡(luò)將在高性能串行處理中實(shí)現(xiàn)。
安全處理根據(jù) DAPD 設(shè)備中的預(yù)處理提供的檢測(cè)環(huán)境以及神經(jīng)網(wǎng)絡(luò)加速和高性能串行處理元件的結(jié)果執(zhí)行實(shí)時(shí)處理和車輛控制。
創(chuàng)建 CPM 給設(shè)計(jì)人員帶來了幾個(gè)接口、可擴(kuò)展性、合規(guī)性和性能挑戰(zhàn)。當(dāng)然,嚴(yán)格的 SWaP-C 限制(尺寸、重量和功率 - 成本)總是伴隨著汽車領(lǐng)域。此外,隨著更高級(jí)別的自動(dòng)駕駛系統(tǒng)通過認(rèn)真的原型設(shè)計(jì)和早期部署,可預(yù)期適用的標(biāo)準(zhǔn)、最佳實(shí)踐和機(jī)器學(xué)習(xí)算法將迅速發(fā)展。
為了克服這些挑戰(zhàn),我們可以設(shè)想一個(gè)集成的可編程解決方案,它不僅可以處理 DAPD 的接口、預(yù)處理和路由功能,而且還可以在同一設(shè)備中集成某些安全處理功能和潛在的神經(jīng)網(wǎng)絡(luò)機(jī)器學(xué)習(xí)功能。硅或作為獨(dú)立的硬件加速器設(shè)備。這一機(jī)會(huì)正在推動(dòng)新型汽車級(jí)可編程多處理器片上系統(tǒng) (MPSoC) IC 的出現(xiàn),該 IC 不僅利用摩爾技術(shù)將多個(gè)應(yīng)用處理器內(nèi)核和實(shí)時(shí)處理器內(nèi)核與高度并行化的可編程邏輯集成在一起, 和高帶寬行業(yè)標(biāo)準(zhǔn)接口,都在同一個(gè)芯片上。
借助兩個(gè)鎖步內(nèi)核,實(shí)時(shí)處理單元 (RPU) 能夠處理高達(dá) ASIL-C 的安全關(guān)鍵功能。為了提供必要的功能安全,這樣的 RPU 還需要能夠減少、檢測(cè)和緩解單個(gè)隨機(jī)故障,包括硬件和單事件引發(fā)的故障。
安全處理器需要直接與車輛控制進(jìn)行交互,例如轉(zhuǎn)向、加速和制動(dòng)。顯然,在這個(gè)子系統(tǒng)中避免處理錯(cuò)誤是至關(guān)重要的。除了內(nèi)核的鎖步功能外,其他重要的緩解措施包括支持緩存和內(nèi)存上的糾錯(cuò)碼 (ECC),以確保實(shí)現(xiàn)自動(dòng)駕駛車輛控制所需的應(yīng)用程序和數(shù)據(jù)的完整性。開機(jī)期間的內(nèi)置自檢 (BIST) 對(duì)于確保底層硬件在運(yùn)行前沒有故障以及在發(fā)現(xiàn)有缺陷時(shí)在設(shè)備內(nèi)功能隔離內(nèi)存和外圍設(shè)備的能力也很重要。
就與整個(gè)車輛的傳感器模式的接口而言,典型的高速接口將包括 MIPI、JESD204B、LVDS 和千兆以太網(wǎng) (GigE),用于相機(jī)、雷達(dá)和激光雷達(dá)等高帶寬接口。MPSoC IC 通常包含靈活的 I/O,可配置為直接與 MIPI、LVDS 和千兆位串行鏈路連接,從而使更高級(jí)別的協(xié)議在可編程邏輯架構(gòu)中實(shí)現(xiàn),通常使用 IP 內(nèi)核。CAN、SPI、I2C 和 UART 等接口已經(jīng)在汽車應(yīng)用領(lǐng)域建立起來,并作為設(shè)備處理系統(tǒng)中的即用型功能提供。
在 MPSoC 器件的可編程邏輯結(jié)構(gòu)中實(shí)施適用協(xié)議還可以輕松整合標(biāo)準(zhǔn)的任何修訂或更新,同時(shí)為解決方案中支持的特定傳感器接口的數(shù)量提供靈活性。
機(jī)器學(xué)習(xí)駕駛
人類每次駕駛都會(huì)獲得知識(shí)和經(jīng)驗(yàn),我們訓(xùn)練的自動(dòng)駕駛機(jī)器也將如此,以駕駛未來幾代車輛。機(jī)器學(xué)習(xí)將在自動(dòng)駕駛中發(fā)揮重要作用,以幫助在與以前遇到的任何情況相似(盡管很少,如果有的話)相同的情況下做出決策。
圖像識(shí)別是目前機(jī)器學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)在自動(dòng)駕駛中最重要的用途之一,可幫助車輛識(shí)別重要物體,如其他車輛、行人、易受傷害的道路使用者(如騎自行車的人)、路口、十字路口、路標(biāo)、障礙物等物體在路上,和其他危險(xiǎn)。在車輛行駛時(shí),獲得這些分析的結(jié)果是時(shí)間緊迫的,并將推動(dòng)對(duì)低功耗嵌入式實(shí)時(shí)機(jī)器學(xué)習(xí)系統(tǒng)的需求。
幀/秒/瓦是嵌入式神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的關(guān)鍵品質(zhì)因數(shù)。輕量級(jí)的板載神經(jīng)網(wǎng)絡(luò)可以使用 C、C++ 和 OpenCL 等高級(jí)語言在 FPGA 中實(shí)現(xiàn),從而可以將功能從處理器系統(tǒng)無縫轉(zhuǎn)移到可編程邏輯。神經(jīng)網(wǎng)絡(luò)的構(gòu)建者已經(jīng)發(fā)現(xiàn)可編程邏輯中 FPGA 處理的高度并行特性,再加上沒有外部?jī)?nèi)存瓶頸,與圖形處理器單元 (GPU) 等替代架構(gòu)相比,具有更高的確定性和響應(yīng)能力。
增加幀/秒/瓦的其他工作表明,與卷積 CNN 等更傳統(tǒng)的模型相比,像脈沖神經(jīng)網(wǎng)絡(luò) (SNN) 這樣的下一代模型可以提高吞吐量并降低功耗。多個(gè) SNN 內(nèi)核已在 FPGA 中成功實(shí)例化,以處理大量視頻通道、每秒高幀數(shù)和僅幾瓦的低功耗。
結(jié)論
完全自動(dòng)駕駛汽車的路線圖已經(jīng)成熟,并且已經(jīng)經(jīng)歷了從基本駕駛輔助系統(tǒng)開始的多個(gè)自動(dòng)駕駛級(jí)別。顯然,安全性至關(guān)重要,但可行的計(jì)算平臺(tái)還必須應(yīng)對(duì)極端的 SWaP-C 挑戰(zhàn)。多處理器片上系統(tǒng) IC 中的高度并行和可重新編程處理可以滿足下一代自動(dòng)駕駛和完全自動(dòng)駕駛系統(tǒng)的需求。這些設(shè)備還集成了合適的安全處理器,能夠滿足 ISO 26262 等行業(yè)安全標(biāo)準(zhǔn),能夠滿足最高級(jí)別自動(dòng)駕駛的關(guān)鍵系統(tǒng)要求。
審核編輯:郭婷
-
處理器
+關(guān)注
關(guān)注
68文章
19295瀏覽量
230001 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8421瀏覽量
132704 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13835瀏覽量
166516
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

線控底盤,自動(dòng)駕駛時(shí)代的基石?
自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論