 UART自動波特率識別程序設計方案
UART自動波特率識別程序設計方案
串口(UART)是嵌入式里最基礎最常用也最簡單的一種通訊(數據傳輸)方式,可以說是工程師入門通訊領域的啟蒙老師,同時串口打印也是嵌入式項目里非常經典的調試與交互方式。
最精簡的串口僅使用兩根單向信號線:TXD、RXD,這兩根信號線是獨立工作的,因此數據收發既可分開也可同時進行,這就是所謂的全雙工。串口沒有主從機概念,并且沒有專門的時鐘信號 SCK,所以串口通信也屬于異步傳輸。
說到異步傳輸,這就不得不提波特率(每秒鐘傳輸bit數)的問題了,通信雙方必須使用一致的波特率才能完成正確的數據傳輸。正常情況下,我們都是為兩個串口設備事先約定好波特率,比如 MCU 與上位機通信,在 MCU 程序里按 115200 的波特率去初始化 UART 外設,然后上位機串口調試助手也設置 115200 波特率,雙方再聯合工作。
有時候,我們也希望能有一種靈活的波特率約定方式,比如建立通信前,在上位機串口調試助手里隨意設置一種波特率,然后按這個波特率發送數據,MCU 端能自動識別出這個波特率,并用識別出來的波特率去初始化 UART 外設,然后再進行后續數據傳輸,這種方式就叫自動波特率識別。痞子衡今天要分享的就是在 MCU 里實現自動波特率識別的程序設計:
程序主頁:https://github.com/JayHeng/cortex-m-apps/tree/master/components/autobaud
一、串口(UART)自動波特率識別程序設計
1.1 函數接口定義
首先是設計自動波特率識別程序頭文件:autobaud.h ,這個頭文件里直接定義如下 3 個接口函數原型。涵蓋必備的初始化流程 init()、deinit(),以及最核心的波特率識別功能 get_rate()。
//!@brief初始化波特率識別
void
autobaud_init
(
void
);
//!@brief檢測波特率識別是否已完成,并獲取波特率值
bool
autobaud_get_rate
(
uint32_t
*rate);
//!@brief關閉波特率識別
void
autobaud_deinit
(
void
);
1.2 識別設計思想
關于識別,因為上位機數據是從 RXD 引腳過來的,所以在 MCU 里需要先將 RXD 引腳配置成普通數字輸入 GPIO(這個引腳需要上拉,默認保持高電平),然后檢測這個 GPIO 的電平跳變(一般用下降沿)并計時。
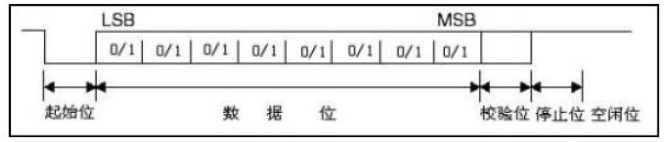
下圖是典型的 UART 單字節傳輸時序,I/O 空閑狀態是高電平,傳輸時總是由 1bit 低電平起始位開啟,然后是從 LSB 到 MSB 的 8bit 數據位,校驗位是可選項(我們暫不開啟),最后由 1bit 高電平停止位結束,I/O 回歸高電平空閑狀態。
Note 1:檢測下降沿跳變,是因為 I/O 空閑為高,起始位的存在保證了每 Byte 傳輸周期總是從下降沿開始。
Note 2:起始位和停止位兩個 bit 的存在還兼有波特率容錯的功能,通信雙方波特率在 3% 的誤差內數據傳輸均可以正常進行。
雖然我們不需要約定上位機波特率,但是要想實現波特率自動識別,上位機初始傳輸的數據卻必須要事先約定好(可理解為接頭暗號),這涉及到 MCU 里檢測電平跳變次數與相應計時計算。MCU識別完成后將暗號發回給上位機確認。
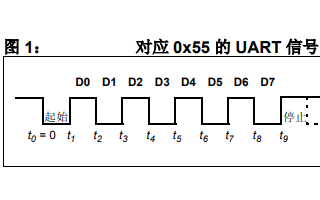
痞子衡設計的接頭暗號是 0x5A, 0xA6 兩個字節,兩字節暗號相比單字節暗號容錯性更好一些(以防 I/O 上有干擾,導致誤識別),根據指定的暗號和 UART 傳輸時序圖,我們很容易得到如下常量定義:
enum
_autobaud_counts
{
//!0x5A字節對應的下降沿個數
kFirstByteRequiredFallingEdges=
4
,
//!0xA6字節對應的下降沿個數
kSecondByteRequiredFallingEdges=
3
,
//!0x5A字節(從起始位到停止位)第一個下降沿到最后一個下降沿之間的實際bit數
kNumberOfBitsForFirstByteMeasured=
8
,
//!0xA6字節(從起始位到停止位)第一個下降沿到最后一個下降沿之間的實際bit數
kNumberOfBitsForSecondByteMeasured=
7
,
//!兩個下降沿之間允許的最大超時(us)
kMaximumTimeBetweenFallingEdges=
80000
,
//!對實際檢測出的波特率值做對齊處理,以便于更好地配置UART模塊
kAutobaudStepSize=
1200
};
上述常量定義里,kMaximumTimeBetweenFallingEdges 指定了兩個下降沿之間允許的最大時間間隔,超過這個時間,自動波特率程序將丟掉前面統計的下降沿個數,重頭開始識別,這個設計也是為了防止 I/O 上有電平干擾,導致誤識別。
kAutobaudStepSize 常量是為了對檢測出的波特率值做對齊處理,公式是 rounded = stepSize * (value/stepSize + 0.5),其中 value 是實際檢測出的波特率值,rounded 是對齊后的波特率值,用對齊后的波特率值能更好地配置UART外設(這跟UART模塊里波特率發生器SBR設計有關)。
最后就是 I/O 電平下降沿檢測方法設計,這里既可以用軟件查詢(就是循環讀取 I/O 輸入電平,比較當前值與上一次值的差異),也可以使用GPIO模塊自帶的邊沿中斷功能。推薦使用后者,一方面計時更精確,另外也不用阻塞系統。檢測到下降沿發生就調用一次如下 pin_transition_callback() 函數,在這個函數里統計跳變次數以及計時。
//!@brief管腳下降沿跳變回調函數
static
void
pin_transition_callback
(
void
);
1.3 主代碼實現
根據上一小節描述的設計思想,我們很容易寫出下面的主代碼(autobaud_irq.c),代碼里痞子衡都做了詳細注釋。有一點要提的是關于其中系統計時。
//!@brief使能GPIO管腳中斷
extern
void
enable_autobaud_pin_irq
(
pin_irq_callback_t
func);
//!@brief關閉GPIO管腳中斷
extern
void
disable_autobaud_pin_irq
(
void
);
//!
static
uint32_t
s_transitionCount;
//!
static
uint64_t
s_firstByteTotalTicks;
//!
static
uint64_t
s_secondByteTotalTicks;
//!
static
uint64_t
s_lastToggleTicks;
//!
static
uint64_t
s_ticksBetweenFailure;
void
autobaud_init
(
void
)
{
s_transitionCount=
0
;
s_firstByteTotalTicks=
0
;
s_secondByteTotalTicks=
0
;
s_lastToggleTicks=
0
;
//計算出下降沿之間最大超時對應計數值
s_ticksBetweenFailure=microseconds_convert_to_ticks(kMaximumTimeBetweenFallingEdges);
//使能GPIO管腳中斷,并注冊中斷處理回調函數
enable_autobaud_pin_irq(pin_transition_callback);
}
void
autobaud_deinit
(
void
)
{
//關閉GPIO管腳中斷
disable_autobaud_pin_irq();
}
bool
autobaud_get_rate
(
uint32_t
*rate)
{
if
(s_transitionCount==(kFirstByteRequiredFallingEdges+kSecondByteRequiredFallingEdges))
{
//計算出實際檢測到的波特率值
uint32_t
calculatedBaud=
(microseconds_get_clock()*(kNumberOfBitsForFirstByteMeasured+kNumberOfBitsForSecondByteMeasured))/
(
uint32_t
)(s_firstByteTotalTicks+s_secondByteTotalTicks);
//對實際檢測出的波特率值做對齊處理
//公式:rounded = stepSize *(value/stepSize + .5)
*rate=((((calculatedBaud*
10
)/kAutobaudStepSize)+
5
)/
10
)*kAutobaudStepSize;
return
true
;
}
else
{
return
false
;
}
}
void
pin_transition_callback
(
void
)
{
//獲取當前系統計數值
uint64_t
ticks=microseconds_get_ticks();
//計數這次檢測到的下降沿
s_transitionCount++;
//如果本次下降沿與上次下降沿之間間隔過長,則從頭開始檢測
uint64_t
delta=ticks-s_lastToggleTicks;
if
(delta>s_ticksBetweenFailure)
{
s_transitionCount=
1
;
}
switch
(s_transitionCount)
{
case
1
:
//0x5A字節檢測時間起點
s_firstByteTotalTicks=ticks;
break
;
case
kFirstByteRequiredFallingEdges:
//得到0x5A字節檢測期間內對應計數值
s_firstByteTotalTicks=ticks-s_firstByteTotalTicks;
break
;
case
(kFirstByteRequiredFallingEdges+
1
):
//0xA6字節檢測時間起點
s_secondByteTotalTicks=ticks;
break
;
case
(kFirstByteRequiredFallingEdges+kSecondByteRequiredFallingEdges):
//得到0xA6字節檢測期間內對應計數值
s_secondByteTotalTicks=ticks-s_secondByteTotalTicks;
//關閉GPIO管腳中斷
disable_autobaud_pin_irq();
break
;
}
//記錄本次下降沿發生時系統計數值
s_lastToggleTicks=ticks;
}
二、串口(UART)自動波特率識別程序實現
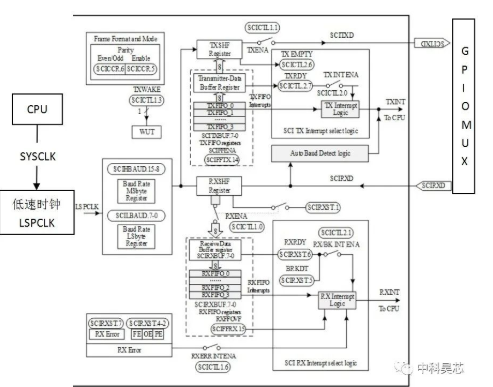
前面講的都是硬件無關設計,但最終還是要落實到具體 MCU 平臺上的,其中 GPIO 中斷部分是跟 MCU 緊相關的。我們以恩智浦 i.MXRT1011 為例來介紹硬件實現。
2.1 管腳中斷方式實現(基于i.MXRT1011)
恩智浦 MIMXRT1010-EVK 有板載調試器 DAPLink,這個 DAPLink 中也集成了 USB 轉串口的功能,對應的 UART 引腳是 IOMUXC_GPIO_09_LPUART1_RXD 和 IOMUXC_GPIO_10_LPUART1_TXD,我們就選用這個管腳 GPIO1[9] 做自動波特率檢測,實現代碼如下:
BSP程序:https://github.com/JayHeng/cortex-m-apps/tree/master/apps/autobaud_imxrt1011/bsp/src/pinmux_utility.c
typedef
void
(*
pin_irq_callback_t
)(
void
);
static
pin_irq_callback_t
s_pin_irq_func;
//!@briefUART引腳功能切換函數
void
uart_pinmux_config
(
bool
setGpio)
{
if
(setGpio)
{
IOMUXC_SetUartAutoBaudPinMode(IOMUXC_GPIO_09_GPIOMUX_IO09,GPIO1,
9
);
}
else
{
IOMUXC_SetUartPinMode(IOMUXC_GPIO_09_LPUART1_RXD);
IOMUXC_SetUartPinMode(IOMUXC_GPIO_10_LPUART1_TXD);
}
}
//!@brief使能GPIO管腳中斷
void
enable_autobaud_pin_irq
(
pin_irq_callback_t
func)
{
s_pin_irq_func=func;
//開啟GPIO1_9下降沿中斷
GPIO_SetPinInterruptConfig(GPIO1,
9
,kGPIO_IntFallingEdge);
GPIO1->IMR|=(
1U
<
9
);
NVIC_SetPriority(GPIO1_Combined_0_15_IRQn,
1
);
NVIC_EnableIRQ(GPIO1_Combined_0_15_IRQn);
}
//!@briefGPIO中斷處理函數
void
GPIO1_Combined_0_15_IRQHandler
(
void
)
{
uint32_t
interrupt_flag=(
1U
<
9
);
//僅當GPIO1_9中斷發生時
if
((GPIO_GetPinsInterruptFlags(GPIO1)&interrupt_flag)&&s_pin_irq_func)
{
//執行一次回調函數
s_pin_irq_func();
GPIO_ClearPinsInterruptFlags(GPIO1,interrupt_flag);
}
}
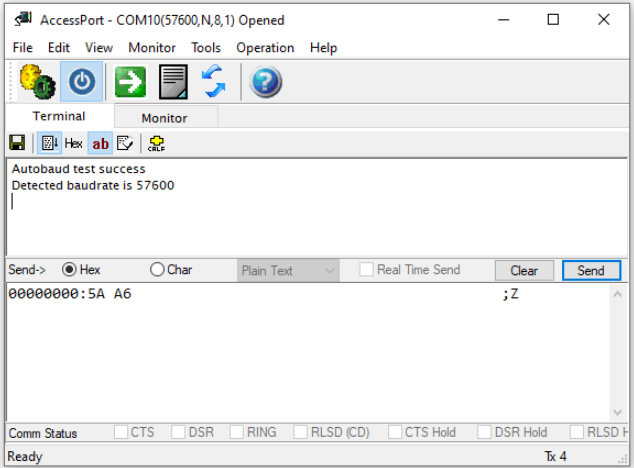
2.2 在MIMXRT1010-EVK上實測
一切就緒,我們現在來實測一下,主函數流程很簡單,測試結果也表明達到了預期效果,每次將 MCU 程序復位運行后,串口調試助手里可任意設置波特率。
int
main
(
void
)
{
//略去系統時鐘配置...
//初始化定時器
microseconds_init();
//將GPIO1_9先配成輸入GPIO
bool
setGpio=
true
;
uart_pinmux_config(setGpio);
//初始化波特率識別
autobaud_init();
//檢測波特率識別是否已完成,并獲取波特率值
uint32_t
baudrate;
while
(!autobaud_get_rate(&baudrate));
//關閉波特率識別
autobaud_deinit();
//配置UART1引腳
setGpio=
false
;
uart_pinmux_config(setGpio);
//初始化UART1外設
uint32_t
uartClkSrcFreq=BOARD_DebugConsoleSrcFreq();
DbgConsole_Init(
1
,baudrate,kSerialPort_Uart,uartClkSrcFreq);
PRINTF(
"Autobaudtestsuccess\r\n"
);
PRINTF(
"Detectedbaudrateis%d\r\n"
,baudrate);
while
(
1
);
}
至此,嵌入式里串口(UART)自動波特率識別程序設計與實現痞子衡便介紹完畢了,
-
mcu
+關注
關注
146文章
17227瀏覽量
351959 -
嵌入式
+關注
關注
5088文章
19158瀏覽量
306495 -
uart
+關注
關注
22文章
1242瀏覽量
101547
發布評論請先 登錄
相關推薦
什么是串口波特率?串口波特率的分類及應用詳解

芯海應用筆記:通用 MCU USART 自動波特率檢測
自動波特率檢測
怎么使用UART設置中的自動波特率?
在dsPIC30F器件上實現自動波特率檢測 AN962中文資
在dsPIC30F器件上實現自動波特率檢測的詳細中文資料概述
在dsPIC30F器件上實現自動波特率檢測
痞子衡嵌入式:嵌入式里串口(UART)自動波特率識別程序設計與實現(輪詢)

SCI串口自動波特率介紹
STM32的USART自動波特率檢測
uart波特率和傳輸頻率的關系 UART串口的常用波特率為多少

MCU串口自動識別波特率原理分析






 工商網監
工商網監
評論