 如何制作一個數據統計物理可視化儀表盤
如何制作一個數據統計物理可視化儀表盤
什么是“FizViz”?
我們正在制作數據的物理可視化,以超酷、即時可讀的大格式呈現信息。這個概念是,您可以在辦公室、車間或任何您想觀看和共享重要數據的地方懸掛一組 FizViz 小部件,例如:
- 我今天賣出了多少產品?這與我的平均水平相比如何?
- 有多少人訪問了我的網站?他們瀏覽了多少頁?
- 是因為我最近發布的貓視頻帖子,我獲得了更多流量,還是因為它與我的產品無關,所以每個人都跳出?
或者,將其連接到其他數據源:
- 我的 3D 打印工作還剩多少時間?
- 這里有多少人?
制作 FizViz 的經歷
顯然,不乏用于過濾、匯總和混合各種形狀和形式的數據的在線工具和系統。但是,它們會讓你遠離你的流程,并且需要(有點神秘的)工作流程知識才能找到你感興趣的東西。
而且,坦率地說,最終制作完成后它們并不是那么令人興奮。
項目不會讓辦公室周圍的人歡呼,并且是枯燥無味的、數字化的,通常也是孤獨的經歷。

FizViz 是如何工作的?
FizViz Widget 由 3 個組件組成:
1)收集您的數據并使用Windows Remote Arduino將當前狀態發送到 FizViz Widget的 Windows PC 或平板電腦(我們喜歡 Surface)。
2)一個Arduino MKR1000,它通過 WiFi 從 PC 接收數據并驅動 FizViz Widget 上的物理控件。
3)顯示數據的物理組件。目前,我們支持:
用于彩色 LED 效果的NeoPixel 燈條
用于創建刻度盤和儀表的步進電機
用于歸零或校準儀表的開關(我們使用簧片開關在 RotoMoto FizViz 小部件上找到零)
基本上,PC 完成了繁重的工作——從您的數據源中提取數據(我們已經包含用于收集 Google Analytics 的源),然后將狀態和命令發送到驅動物理安裝的 Arduino。
我們提供了所有原理圖和信息,用于獲取帶有步進電機并運行的基本 NeoPixel 小部件。之后,您可以隨心所欲地發揮創造力。
我們的愿景是繼續為不同類型的數據構建不同的小部件。我們從一個示例開始,但 FizViz 真正是為您想要顯示的數據類型制作正確的可視化。沒有規則!
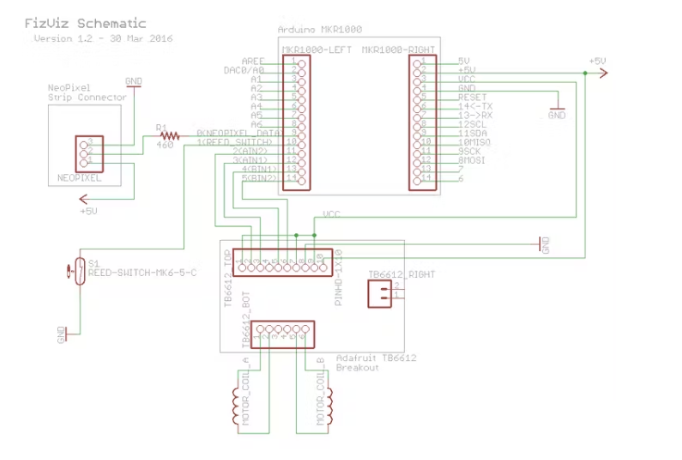
連接 FizViz 相當簡單。我們最新的原理圖能在文章下方找到。以下是有關組件的一些注意事項:
Arduino MKR1000 - 我們運營的大腦。這里沒什么好說的,只是它很小,而且效果很好!
NeoPixel Strips - 連接到 NeoPixel Strips 非常簡單 - 我們在數據引腳和 Arduino 之間使用了一個 460ohm 電阻器 (R1)。然后,通常,我們將條帶的電源直接連接到系統的主 5v 電源。Adafruit 的 NeoPixel Uberguide是集成 NeoPixels 的圣經,它包含一個 Arduino 庫,您可以在項目中使用它來簡化控制。條帶可能有兩條接地線(黑色)。它們都連接到接地引腳。
Adafruit TB6612 分線板- 控制任何典型的步進電機。制作精確移動的東西(例如刻度盤、儀表或滑塊)真的很酷。我們用它來驅動 RotoMoto FizViz 中的針。這里不加太多。我們遵循 Adafruit 提供的說明,使其與內置的 Arduino Stepper 庫兼容以進行控制。
簧片開關 - 我們的 RotoMoto FizViz 小部件在針中使用磁鐵和簧片開關來檢測針何時為零。根據您的小部件的機制,這里也可以使用不同的開關,例如微接觸開關或壓力開關。
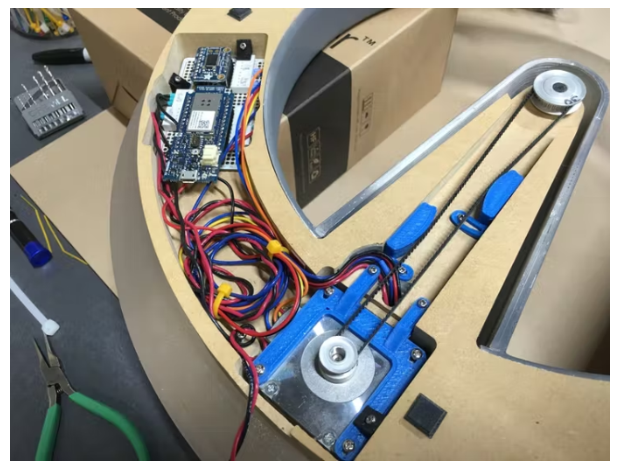
我們將電子產品打包到Adafruit Perma-Proto 半尺寸面包板上以填充到我們的小部件中,但根據您的外形尺寸,您可能需要其他形狀。這是我們的樣子:
固件/Arduino 代碼概述
我們在 FizViz-Arduino 存儲庫包含為 FizViz Widgets 提供支持的最新和最棒的 Arduino 草圖版本。有更多關于使項目在那里啟動和運行所需的細節的信息,但這里有一些重要的亮點:
WiFi 配置- 請注意有關 WiFi 配置的注意事項。如果你有一個更奇特的 WiFi 網絡,你可能需要在這里更深入地挖掘。
外部依賴項 -我們在外部依賴項方面相當簡單,但我們確實引用了一些您可能需要安裝的庫。頁面底部始終引用最新的庫。
Windows / 遠程 Arduino 概述
我們的策略是從 ms-iot 的遠程 Arduino 接線代碼開始。我們沒有直接從 Windows 應用程序控制引腳,而是設置了幾個自定義 Firmata 控制消息。我們對遠程接線代碼做了一個小改動,以允許將自定義消息傳遞到 Firmata 層。然后,我們在 Arduino 項目中實現了自定義消息處理程序,根據 Windows 應用程序的控制命令更新 FizViz 狀態。
我們還增加了對從 Google Analytics 收集分析數據的支持,因為這是我們自己的 FizViz Widgets 的主要用例。希望這將有助于作為參考,即使您決定連接到不同的數據源。

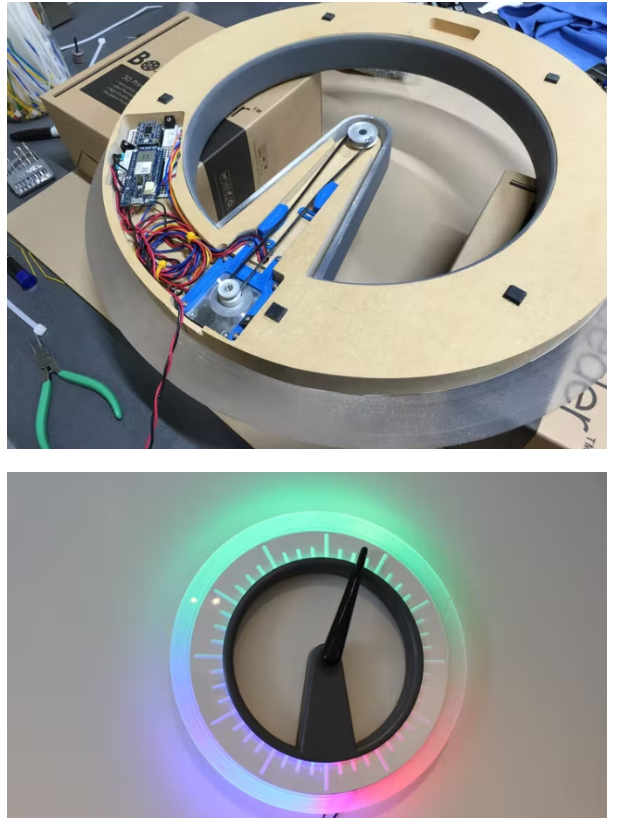
小部件 #1 - “RotoMoto”
我們構建了 RotoMoto 來展示 FizViz 的所有功能。它通過在一個小部件中展示我們的照明和步進控制的非常酷的應用程序來鍛煉平臺,您可以自豪地掛在任何辦公室。
構建您自己的 RotoMoto 非常簡單。即使您沒有所有相同的工具,也有很多方法可以實現與我們相同的效果,只要您能拿到手上的任何東西。本文的其余部分解釋了構建以及您可以在哪里對不同的效果進行一些調整。
CAD 存儲庫
首先,我們將 CAD 文件保存在Github 的 FizViz-CAD 存儲庫中。您會發現我們為制作 RotoMoto 小部件而制造的各種部件的 STEP 和 STL 版本。
附加部件
除了我們的 CAD 設計之外,這里是我們在裝配中使用的零件列表:
Description Supplier Part # Notes
Stepper Pulley McMaster-Carr 1375K15 15 tooth
Needle Pulley McMaster-Carr 1375K28 30 tooth
Bearings McMaster-Carr 60355K701 Used 2
Belt McMaster-Carr 7887K28
Stepper Motor Screws De Mode Elec. 54-410-100 2.6mmx8mm
Reed Switch Digikey 306-1124-1-ND
Magnet Digikey 469-1002-ND 0.5“Dx0.125”H
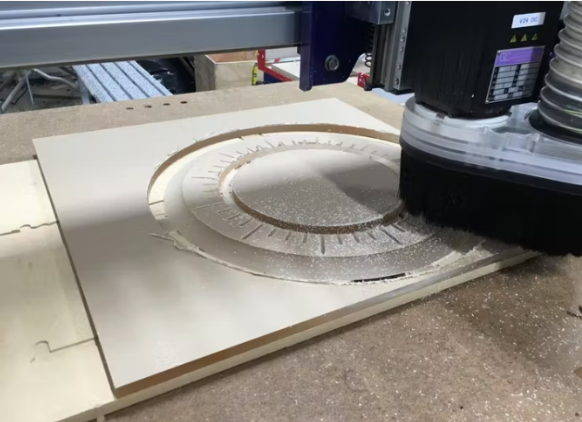
安裝板
RotoMoto 構建的支柱是安裝板。基本上,它容納了機械和電氣組件,并將所有東西都整齊地藏在顯示器發光的邊框后面。
我們使用 ShopBot CNC 從 1“ 厚 MDF 板上銑出我們的安裝板。還有各種其他方法可以切割出形狀(激光切割機、拼圖等),但由于 CNC 就在這里,這就是我們使用的。

擋板
到目前為止,我們構建的最大特點是發光擋板。我們用 1/2” 厚的亞克力板切割這部分。同樣,在 ShopBot 上。照明技術的關鍵是任何“結霜”的表面被切割的地方都會被照亮。您可以使用 Dremel 或其他手創建標記- 工具也是如此。
我們提供的 CAD 模型減半,因為以這種方式使用材料更有效。用丙烯酸水泥將這兩個部分連接在一起,或者如果您打算一次性完成,可以合并模型(這就是我們演示的構建方式)。
內圈
內環是構建中的關鍵部件 - 它是 NeoPixel 條連接并隱藏在丙烯酸表圈后面的位置。我們的制造包括用 PLA 將其大塊 3D 打印在 TAZ5 上,然后將其粘合在一起。經過大量的填充物和底漆后,我們得到了一個非常堅固的環。

電機和機械
CAD 存儲庫包含我們的 Sanyo Pancake Stepper 的電機支架以及皮帶張緊器和軸的文件。安裝相當簡單 - 皮帶和滑輪的安裝如下所示。在安裝座中使用兩個軸承有助于提高剛度并保持軸筆直。
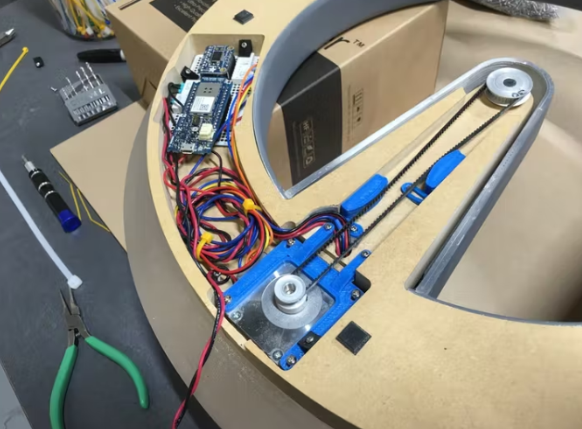
接線
讓一切都適合是有點棘手。首先,將 NeoPixel 條膠粘或粘貼到內環上,使其牢固地固定到位。然后,簧片開關和 NeoPixels 的電線穿過底座主體上的孔。之后,內環滑過擋板并進入安裝座。

完成步驟
最后一件事是打包電線并固定所有東西。完成接線,然后你就擁有了你自己的 RotoMoto!
-
儀表盤
+關注
關注
0文章
56瀏覽量
14937 -
可視化
+關注
關注
1文章
1194瀏覽量
20942 -
DIY設計
+關注
關注
2文章
59瀏覽量
19810
發布評論請先 登錄
相關推薦
虛擬儀表盤是未來的趨勢嗎?
汽車儀表盤電源設計
汽車儀表盤MCU背后的故事
汽車儀表盤MCU背后的故事
【課程筆記】儀表盤和數字圖的應用
一般圖表做不了的分析,BI數據可視化圖表可以
一文淺析汽車儀表盤
開發汽車obd數字儀表盤的過程記錄
新手必看:數據可視化圖表的選擇技巧
集成TPMS功能的儀表盤設計方案解析

集成TPMS功能的電動汽車儀表盤設計解析

儀表盤液晶化發展趨勢_奧迪在打什么算盤?
設計全液晶儀表盤的介紹
手把手教你完成數據儀表盤的設計步驟






 工商網監
工商網監
評論