 RT-Thread記錄(十一、UART設備—源碼解析)
RT-Thread記錄(十一、UART設備—源碼解析)
深入理解 RT-Thread I/O 設備模型 — 分析 UART設備源碼。
目錄
前言
一、初識 UART 操作函數(應用程序)
二、UART 的初始化
2.1 UART 設備初始化位置
2.2 UART 設備初始化函數分析
stm32_uart 結構體
UARTX_CONFIG
stm32_uart 結構體初始化
2.3 UART 設備初始化結果圖
三、UART 設備驅動框架層
設備驅動框架層如何與設備驅動層關聯
四、UART 設備驅動層
前言
上文我們認識了解了 RT-Thread I/O 設備模型,本來計劃是從最簡單的設備 GPIO 口開始講解 RT-Thread 的設備模型,但是實際上 PIN 設備模型有點特殊,并不是完美符合上一篇博文中 《2.3 訪問 I/O 設備相關》小結介紹的函數,所以這個我們放在后面文章說明。
而 UART 設備模型的操作完美貼合上一篇博文的介紹,所以我把 UART 設備先說明了,這樣更加加深一下對 RT-Thread I/O 設備模型的認識。
本文從 UART 設備驅動層 和 設備驅動框架層 分析 RT-Thread 中 UART 設備的實現。目的在于通過官方一個成熟的設備驅動的實例,讓我們確實的理解體會 RT-Thread I/O 設備模型。
本 RT-Thread 專欄記錄的開發環境:
RT-Thread記錄(一、RT-Thread 版本、RT-Thread Studio開發環境 及 配合CubeMX開發快速上手)
RT-Thread記錄(二、RT-Thread內核啟動流程 — 啟動文件和源碼分析)
RT-Thread 設備篇系列博文鏈接:
RT-Thread記錄(十、全面認識 RT-Thread I/O 設備模型)
一、初識 UART 操作函數(應用程序)
首先我們來看一下在 RT-Thread 中 UART 操作函數,這是模型框架中最上層的應用層所需要調用的函數,如下面的表格:
| rt_device_find() | 查找設備 |
| rt_device_open() | 打開設備 |
| rt_device_read() | 讀取數據 |
| rt_device_write() | 寫入數據 |
| rt_device_control() | 控制設備 |
| rt_device_set_rx_indicate() | 設置接收回調函數 |
| rt_device_set_tx_complete() | 設置發送完成回調函數 |
| rt_device_close() | 關閉設備 |
可以看到,對 UART 的操作和上一篇文章 《RT-Thread記錄(十、全面認識 RT-Thread I/O 設備模型)》 幾乎一模一樣,這也是前言中我說的為什么 UART 設備模型 是復習理解 RT-Thread I/O 設備模型的完美設備。
對于這些操作函數,是給最上層的應用程序使用的,我們要使用一個 UART 設備,應用程序最開始肯定是需要使用rt_device_find()查找設備,在上一篇文章說過,大部分常用的設備 RT-Thread 已經幫我們寫好了驅動,我們直接在應用層調用操作接口即可,UART的驅動也是 RT-Thread 已經寫好的。
那么我們該查找什么名字呢?RT-Thread 底層是如何實現的呢? 帶著這些問題,我們從最開始來分析說明一下 RT-Thread 的 UART 設備。
?? 先列出 RT-Thread 的 UART 操作函數,讓我們對 UART 應用層的函數有個了解,然后帶著一些好奇讓我們從底層源碼來分析一下 RT-Thread 的 UART 設備。
二、UART 的初始化
首先,UART 設備作為一個外設,肯定需要初始化,我們在系列博文第二篇《RT-Thread記錄(二、RT-Thread內核啟動流程 — 啟動文件和源碼分析)》分析過 RT-Thread 初始化。
2.1 UART 設備初始化位置
在文中章節 “2.2.1 板級硬件初始化 — rt_hw_board_init” 講到了硬件初始化相關,如下圖:
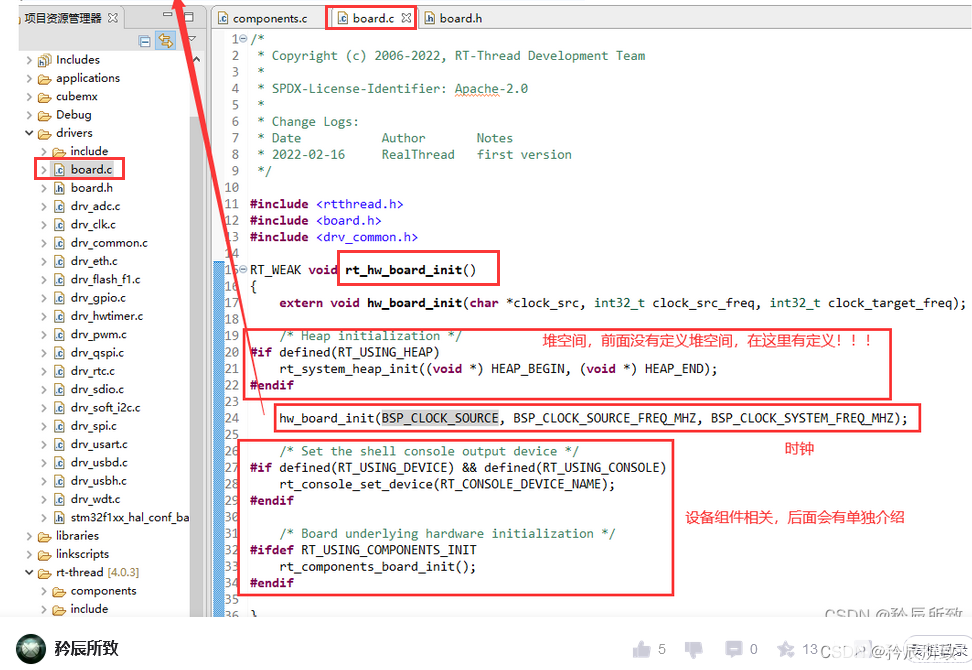
在 rt_hw_board_init() 函數中有一個 hw_board_init,使用到的 UART 設備的初始化就在這個函數里面,如圖:

說明一下,這個hw_board_init里面初始化的哪些設備是和 RT-Thread 配置一一對應的。
注意到他們都是條件編譯,在 env 工具中配置了使用的外設之后,都會在這里進行初始化,對于我們使用 RT-Thread Studio 來說,就是如下圖所示:
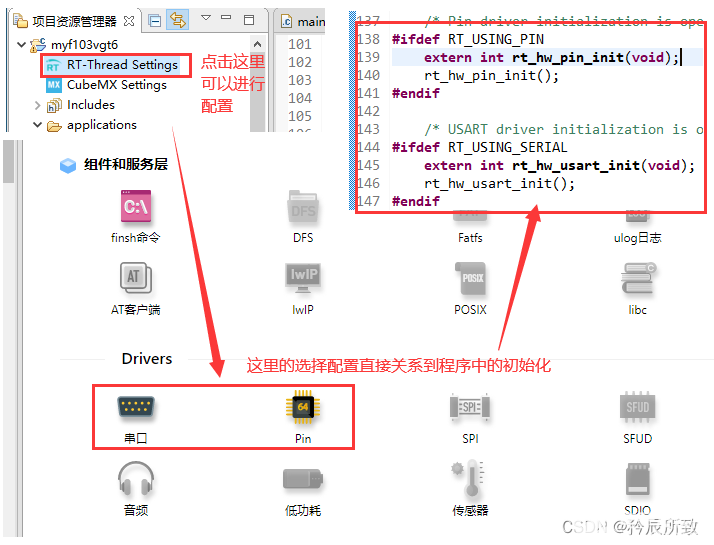
2.2 UART 設備初始化函數分析
通過上文介紹,我們找到了 UART 設備的初始化函數 rt_hw_usart_init:
int rt_hw_usart_init(void)
{
rt_size_t obj_num = sizeof(uart_obj) / sizeof(struct stm32_uart);
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT;
rt_err_t result = 0;
stm32_uart_get_dma_config();
for (int i = 0; i < obj_num; i++)
{
uart_obj[i].config = &uart_config[i];
uart_obj[i].serial.ops = &stm32_uart_ops;
uart_obj[i].serial.config = config;
/* register UART device */
result = rt_hw_serial_register(&uart_obj[i].serial, uart_obj[i].config->name,
RT_DEVICE_FLAG_RDWR
| RT_DEVICE_FLAG_INT_RX
| RT_DEVICE_FLAG_INT_TX
| uart_obj[i].uart_dma_flag
, NULL);
RT_ASSERT(result == RT_EOK);
}
return result;
}
這個初始化函數直接看上去,只有一個函數我們比較熟悉rt_hw_serial_register,顧名思義,串口設備注冊函數,不同于簡單的 I/O 設備注冊函數 rt_device_register,說明它 UART 設備還有設備驅動框架層,這個rt_hw_serial_register就是 UART 設備驅動框架層定義的函數。
這個設備驅動層 和 設備驅動框架層我們待會再來說明,我們先從頭簡單分析一下這個 UART 設備驅動程序。
第一句,這個語句是為了確認一下有幾個串口設備需要進行初始化:
rt_size_t obj_num = sizeof(uart_obj) / sizeof(struct stm32_uart);
其中 uart_obj 有如下定義:
static struct stm32_uart uart_obj[sizeof(uart_config) / sizeof(uart_config[0])] = {0};
☆ uart_obj 是 stm32_uart 類型的結構體數組,其數組長度為sizeof(uart_config)/sizeof(uart_config[0]) ☆
stm32_uart 結構體
在 RT-Thread 操作系統中,對 UART設備的初始化,可以理解為就是對 stm32_uart 結構體對象 的初始化 。
我畫了一張結構圖如下:
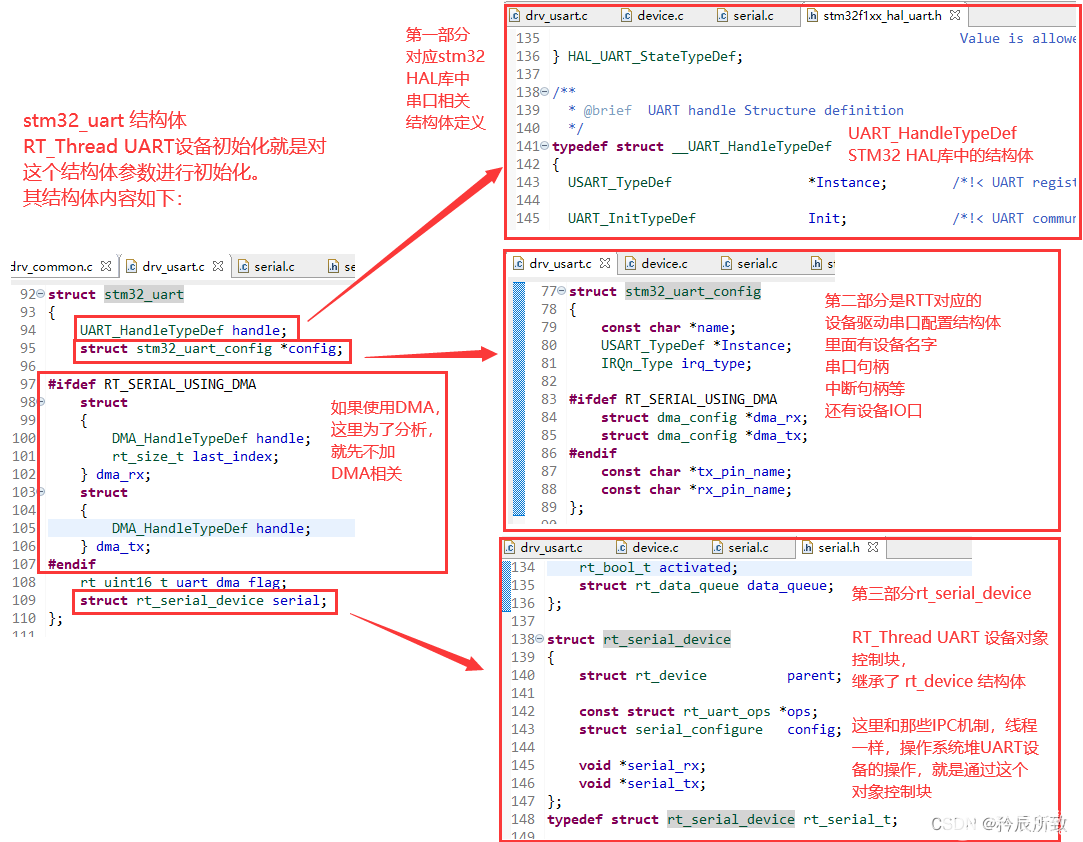
stm32_uart 結構體這里我們先不分析里面具體的含義,在后文對應的地方都會有響應的說明,我們先回到初始化的問題上來。
我們接著上面分析,數組變量 uart_obj 的長度是多少呢?看一下 uart_config 是什么,如下圖:
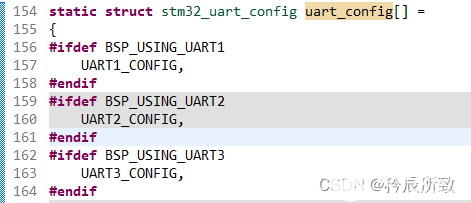
uart_config 是 stm32_uart_config 類型的結構體數組,其數組長度是根據 RT-Thread 配置使用哪些串口決定的。
比如我們使用了 串口1 和 串口3,那么uart_config 就等于:
static struct stm32_uart_config uart_config[2] =
{
UART1_CONFIG,
UART3_CONFIG,
};
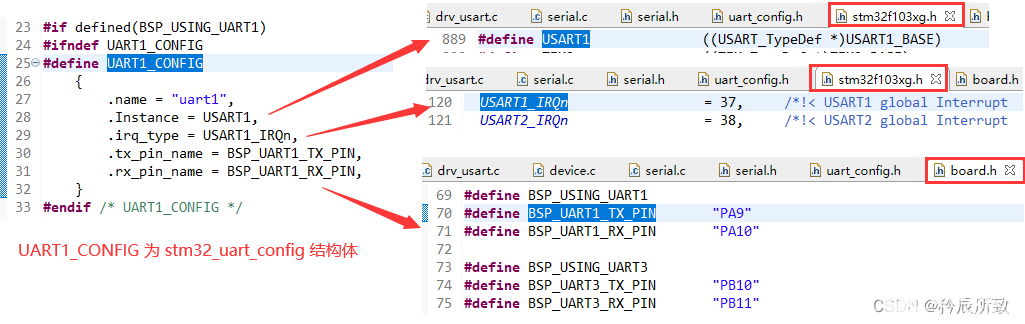
UARTX_CONFIG
這里講到 UART1_CONFIG 就順帶提一下,UART1_CONFIG 是 stm32_uart_config 類型的結構體,在RT-Thread 中是通過 宏定義來定義的:
引出這么多,我們回到最初的rt_hw_usart_init函數第一句的代碼:
rt_size_t obj_num = sizeof(uart_obj) / sizeof(struct stm32_uart);
以上面為例,只使用了 UART1 和 UART3 ,uart_obj數組長度為2,也就表明有2個stm32_uart 結構體的成員需要進行初始化,也就是需要初始化 2個 UART 設備。 上面句子中 obj_num = 2;
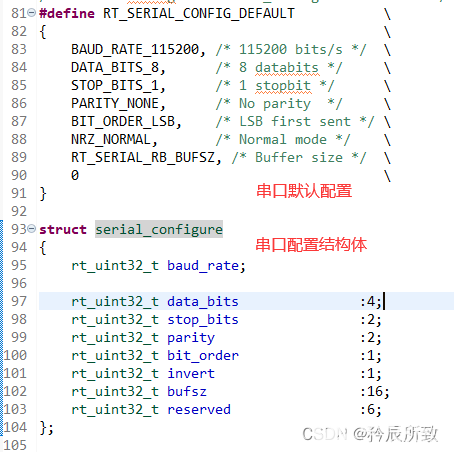
接下來的語句:
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT;
串口配置結構體,初始化等于默認配置,這里具體也好理解,看下圖便知:
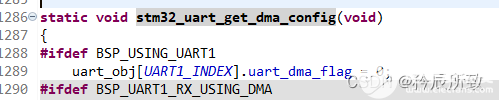
再往下看,獲取串口 DMA 配置:
stm32_uart_get_dma_config();
函數如下,如果沒有使用DMA ,那么只會有一條語句,就是 uart_dma_flag = 0; 表示沒有使用DMA。
在上面我們介紹stm32_uart 結構體的時候,uart_dma_flag 就是這個結構體的一個成員變量。
stm32_uart 結構體初始化
再接下來就是uart_obj[i]的初始化了,有幾個串口就初始化幾遍:
for (int i = 0; i < obj_num; i++)
{
uart_obj[i].config = &uart_config[i];
uart_obj[i].serial.ops = &stm32_uart_ops;
uart_obj[i].serial.config = config;
/* register UART device */
result = rt_hw_serial_register(&uart_obj[i].serial, uart_obj[i].config->name,
RT_DEVICE_FLAG_RDWR
| RT_DEVICE_FLAG_INT_RX
| RT_DEVICE_FLAG_INT_TX
| uart_obj[i].uart_dma_flag
, NULL);
RT_ASSERT(result == RT_EOK);
}
首先里面第一句:
uart_obj[i].config = &uart_config[i];
其中 uart_config[i] 就是我們上文說的 UARTX_CONFIG,通過宏定義定義的 stm32_uart_config 類型的結構體。
第二句:
uart_obj[i].serial.ops = &stm32_uart_ops;
上文分析過stm32_uart 結構體,但是并沒有深入分析其中的成員serial,它是 RT-Thread 的 UART 設備對象控制塊,其中ops為結構體類型的指針:
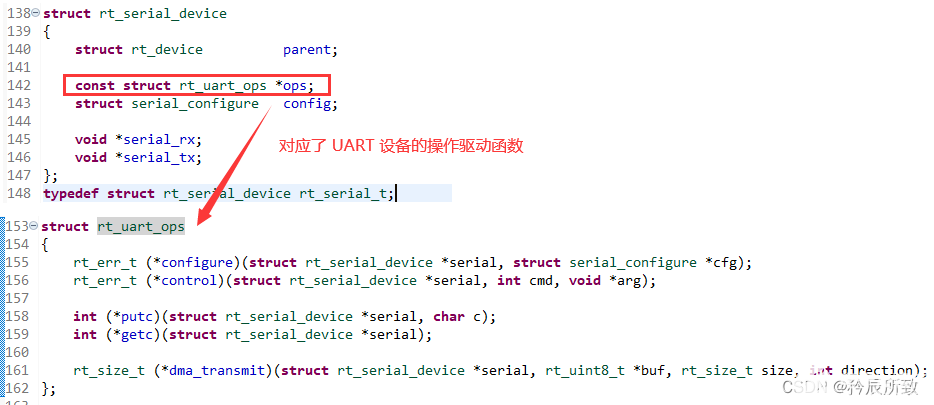
stm32_uart_ops為 RT-Thread 設備驅動層定義好的,其作用是指定 UART 設備的操作函數:
第三句:
uart_obj[i].serial.config = config;
上文講過的,默認都是RT_SERIAL_CONFIG_DEFAULT,如果我們需要修改,可以通過rt_device_control修改。
第四句:
result = rt_hw_serial_register(&uart_obj[i].serial, uart_obj[i].config->name,
RT_DEVICE_FLAG_RDWR
| RT_DEVICE_FLAG_INT_RX
| RT_DEVICE_FLAG_INT_TX
| uart_obj[i].uart_dma_flag
, NULL);
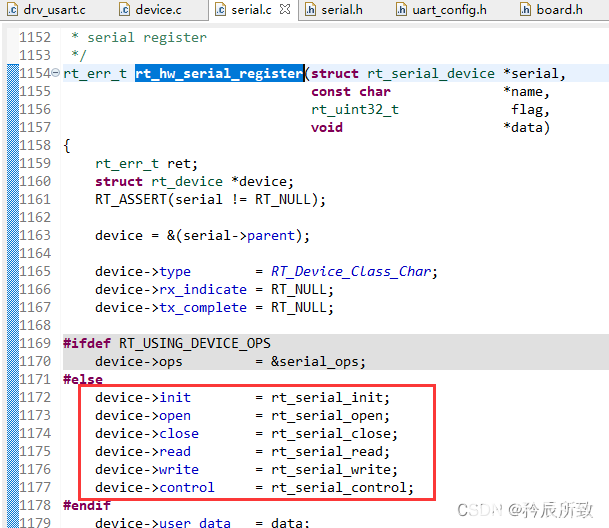
這個函數就是我們講過的 I/O 設備模型中的設備注冊函數,如圖:
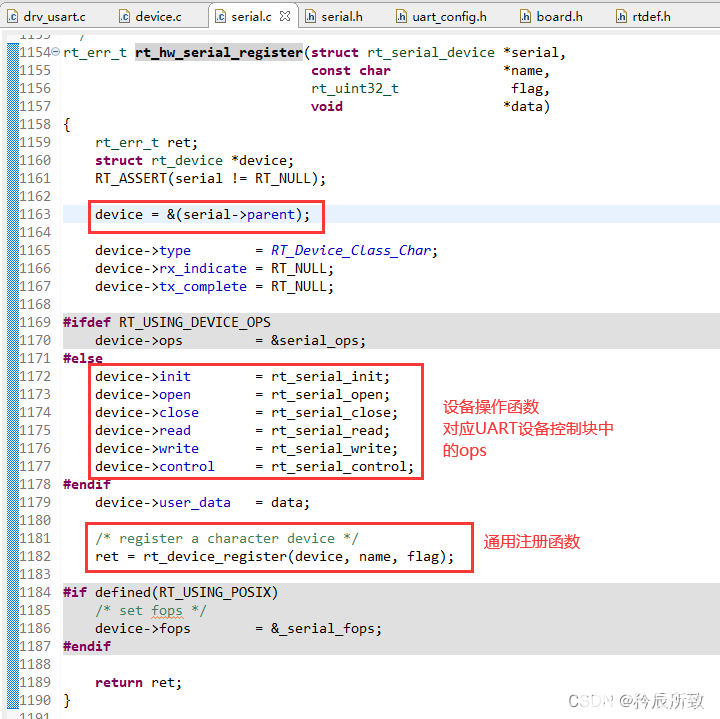
在上面初始化中:
uart_obj[i].serial 為 rt_serial_device 類型,就是 UART 設備的控制塊,它付給注冊函數第一個參數;
uart_obj[i].config->name 中的name名字,就是設備注冊后 使用rt_device_find() 尋找的名字。
其中rt_hw_serial_register函數屬于(設備驅動框架層的函數),他會調用通用的 rt_device_register(I/O設備管理層的函數)對 UART 設備進行注冊。
2.3 UART 設備初始化結果圖
經過上面的一系列分析,最終一個 UART設備初始化以后的結果如下圖所示:
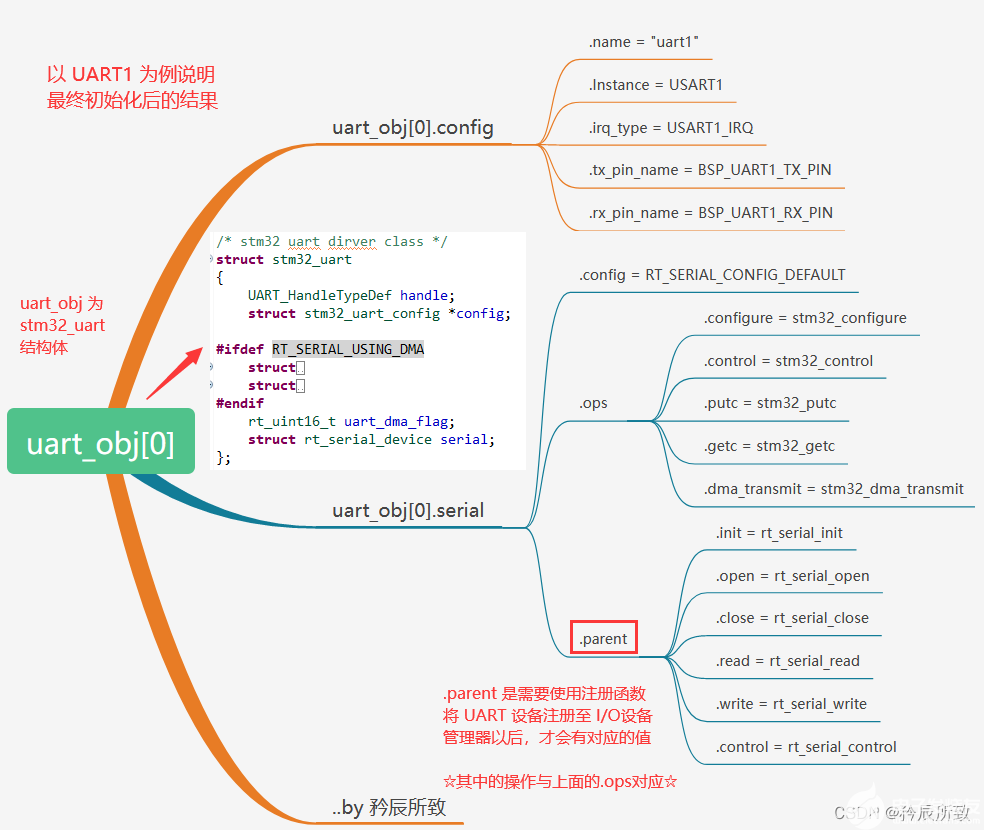
?? UART 的初始化,最主要的是要了解 stm32_uart 結構體(以STM32驅動為例),通過對結構體的認識,初始化步驟的分析,讓我們認識到了RT-Thread 對于 UART 設備驅動層的設計,也讓我們接下來對認識 不同層之間如何聯系打下了一定的基礎。
三、UART 設備驅動框架層
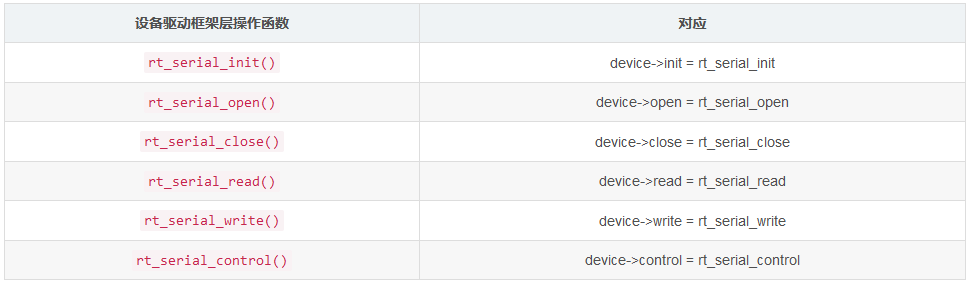
我們回頭來看本文開頭說的 UART 那些操作函數,再結合上文所提到的初始,再結合上一篇文章《RT-Thread記錄(十、全面認識 RT-Thread I/O 設備模型)》的基礎,我們可以確定,上層應用所用到的UART 操作函數就是在使用rt_hw_serial_register 時候關聯到驅動框架層的:
而且再復習一下, 設備驅動框架層是 RT-Thread 系統的東西,官方已經寫好的,UART 設備驅動框架層的代碼為 serial.c,其位置如下圖:
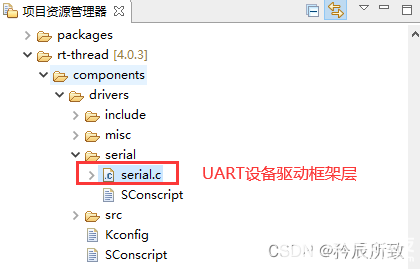
在其對應的 serial.h 頭文件中包含了許多 UART 設備通用的宏定義,大家可以自行查看。
設備驅動框架層如何與設備驅動層關聯
☆在這里我們主要需要關注的就是,設備驅動框架層是如何 和 設備驅動層關聯起來的。☆
首先我們先看一下其中的幾個串口操作函數:
我們隨意查看其中一個函數查看,如下圖:
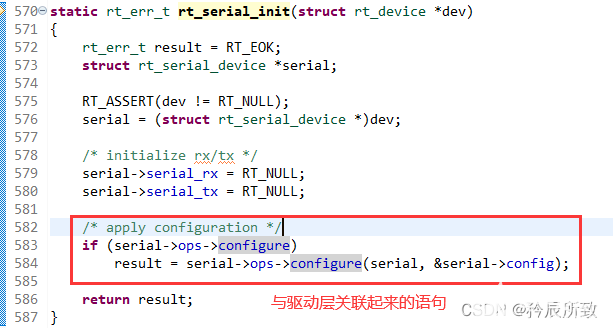
可以看到上圖有一句關鍵的代碼:
if (serial->ops->configure)
result = serial->ops->configure(serial, &serial->config);
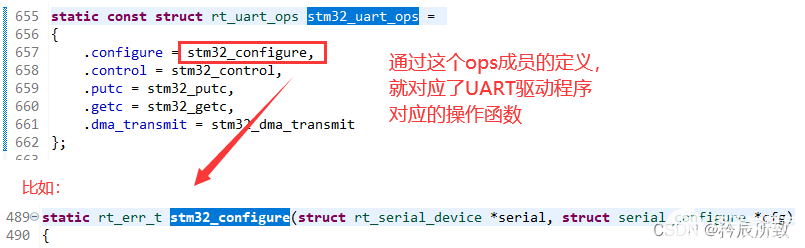
上面我們在將初始化的時候有過代碼:
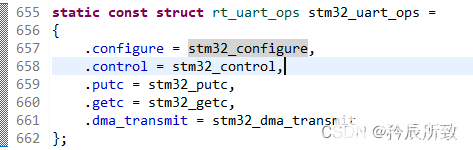
/*
static const struct rt_uart_ops stm32_uart_ops =
{
.configure = stm32_configure,
.control = stm32_control,
.putc = stm32_putc,
.getc = stm32_getc,
.dma_transmit = stm32_dma_transmit
};
*/
uart_obj[i].serial.ops = &stm32_uart_ops;
所以上面的表格可進一步的改為如下對應表格:
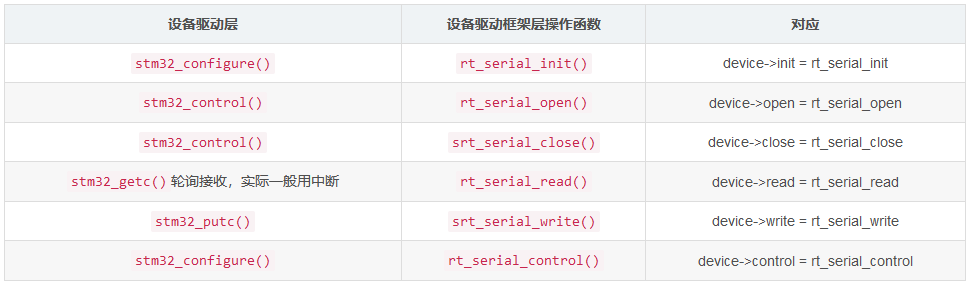
通過上面的分析,基本上有點撥云見日的感覺!
?? UART 設備驅動框架層是 RT-Thread 系統通用的,他上連接 I/O 設備管理層,下連接 設備驅動層。 通過分析,我們已經知道他們之間如何關聯。
四、UART 設備驅動層
其實在上面的文章分析的時候已經說清楚了 UART 設備驅動是如何與 設備驅動層關聯起來的。
在 RT-Thread 中,我們的 UART 設備驅動文件為:drv_usart.c ,其位置位于 drivers 文件夾下面:
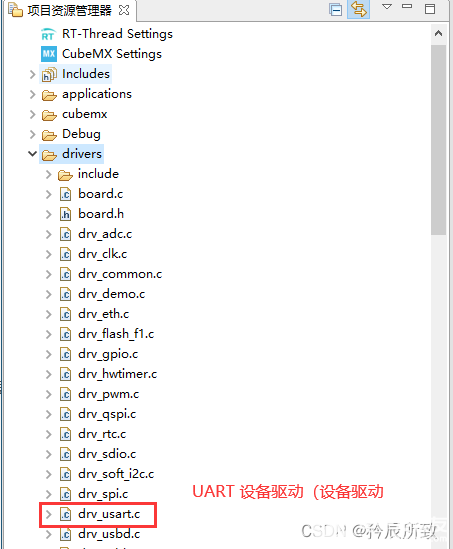
這一層就是與我們使用的硬件設備直接關聯的一層,我們在上面介紹的 UART 設備初始化函數也在這個驅動文件中。
再次復習一下,設備驅動層是與使用的硬件直接關聯的,因為使用的是STM32 ,其很多地方都調用了 ST官方 HAL 庫的定義,是在 HAL 庫的基礎之上實現的驅動代碼。
我們只選幾個部分做示例說明,在驅動中下面幾個函數肯定是有的:
配置函數:
我們看一下驅動層的配置函數stm32_configure,不難發現這個函數其實和裸機中的差不多,其中還調用了 HAL 庫中的 HAL_UART_Init函數(函數還是比較簡單的,我們這里說明一下舉個例子即可):
static rt_err_t stm32_configure(struct rt_serial_device *serial, struct serial_configure *cfg)
{
struct stm32_uart *uart;
RT_ASSERT(serial != RT_NULL);
RT_ASSERT(cfg != RT_NULL);
uart = rt_container_of(serial, struct stm32_uart, serial);
/* uart clock enable */
stm32_uart_clk_enable(uart->config);
/* uart gpio clock enable and gpio pin init */
stm32_gpio_configure(uart->config);
uart->handle.Instance = uart->config->Instance;
uart->handle.Init.BaudRate = cfg->baud_rate;
uart->handle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
uart->handle.Init.Mode = UART_MODE_TX_RX;
uart->handle.Init.OverSampling = UART_OVERSAMPLING_16;
switch (cfg->data_bits)
{
case DATA_BITS_8:
uart->handle.Init.WordLength = UART_WORDLENGTH_8B;
break;
case DATA_BITS_9:
uart->handle.Init.WordLength = UART_WORDLENGTH_9B;
break;
default:
uart->handle.Init.WordLength = UART_WORDLENGTH_8B;
break;
}
switch (cfg->stop_bits)
{
case STOP_BITS_1:
uart->handle.Init.StopBits = UART_STOPBITS_1;
break;
case STOP_BITS_2:
uart->handle.Init.StopBits = UART_STOPBITS_2;
break;
default:
uart->handle.Init.StopBits = UART_STOPBITS_1;
break;
}
switch (cfg->parity)
{
case PARITY_NONE:
uart->handle.Init.Parity = UART_PARITY_NONE;
break;
case PARITY_ODD:
uart->handle.Init.Parity = UART_PARITY_ODD;
break;
case PARITY_EVEN:
uart->handle.Init.Parity = UART_PARITY_EVEN;
break;
default:
uart->handle.Init.Parity = UART_PARITY_NONE;
break;
}
if (HAL_UART_Init(&uart->handle) != HAL_OK)
{
return -RT_ERROR;
}
return RT_EOK;
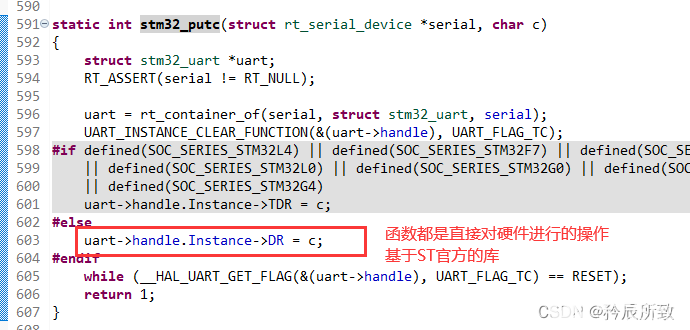
發送函數:
關于中斷:
中斷入口函數還是我們熟悉的USART1_IRQHandler,其流程如下圖所示:
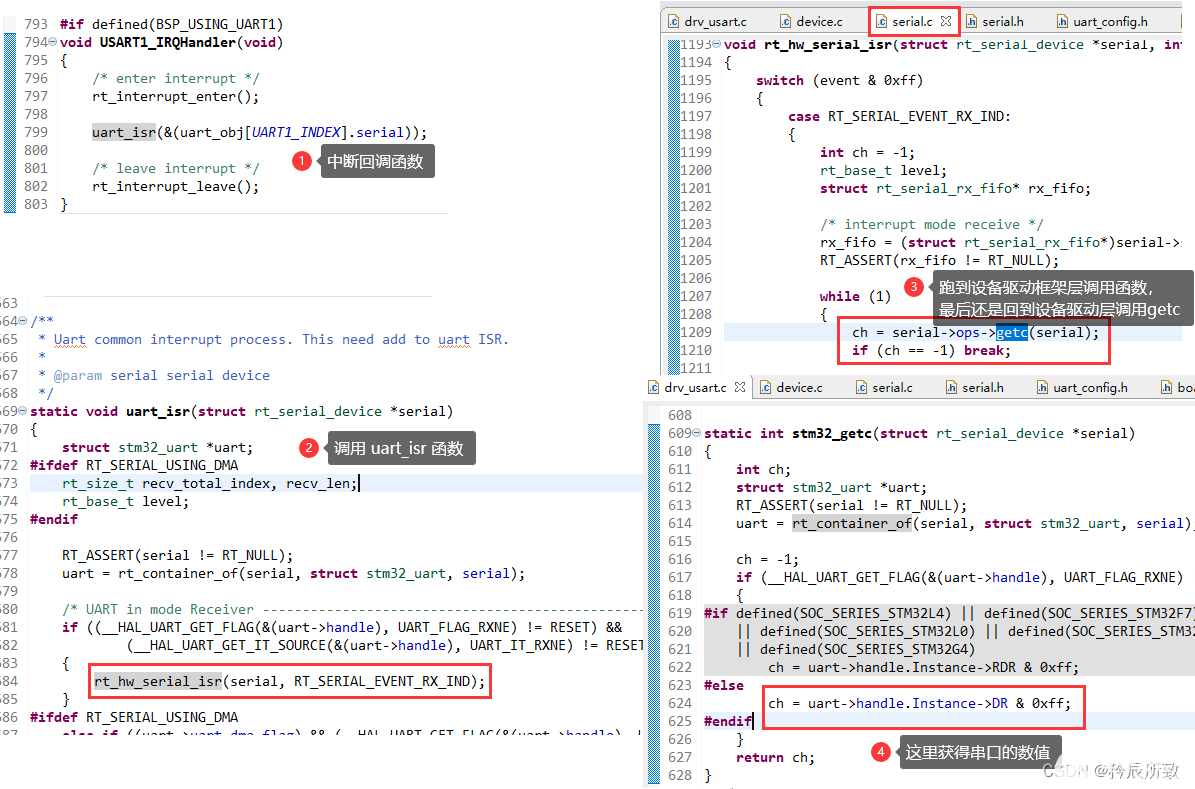
UART 設備驅動層直接與 UART 硬件相關,其中函數都可以直接對硬件進行操作,其實上層應用可以直接調用 驅動層的函數使用,很多函數的實現基于官方的HAL 庫。
結語
本文通過對 UART設備初始化分析,對 UART 設備模型各層次的源碼關聯進行對應說明,通過現成的UART 設備模型,我們更加的理解了 RT-Thread 的I/O 設備模型,最后總結如圖所示:

其實從應用來說,知道不知道底層的這些實現都沒有太大的關系,所以即便一下子看不懂也沒有關系,多看看源碼,靜下心來好看還是不難理解的。
?? 如果上一篇博文還沒能理解 RT-Thread I/O 設備模型,那么加上這篇文章,你一定行 (* ̄︶ ̄) ??
為了加深對 RT-Thread 的I/O 設備模型的說明,本文花了不少時間,在接下來的設備使用測試中,如果不是特除情況,應該就不會再進行這樣的分析了,我們就要正式進入 RT-Thread 設備的使用學習過程。
下一篇文章我們就要從 UART 設備使用開始學習 RT-Thread 設備的使用。
-
uart
+關注
關注
22文章
1235瀏覽量
101397 -
源碼
+關注
關注
8文章
641瀏覽量
29215 -
GPIO
+關注
關注
16文章
1204瀏覽量
52104 -
RT-Thread
+關注
關注
31文章
1289瀏覽量
40135
發布評論請先 登錄
相關推薦
RT-Thread上CAN實踐

開源共生 商業共贏 | RT-Thread 2024開發者大會報名啟動!
2024 RT-Thread全球巡回 線下培訓火熱來襲!
【好書推薦】RT-Thread設備驅動開發指南
RT-Thread 新里程碑達成——GitHub Star 破萬!
基于 RT-Thread專業版的EtherCAT主站方案
6月6日杭州站RT-Thread線下workshop,探索RT-Thread混合部署新模式!
2024 RT-Thread 全球技術大會演講議程發布!
RT-Thread混合部署Workshop北京站來啦!
4月25日北京站RT-Thread線下workshop,探索RT-Thread混合部署新模式
4月10日深圳場RT-Thread線下workshop,探索RT-Thread混合部署新模式!

4月10日深圳場RT-Thread線下workshop,探索RT-Thread混合部署新模式!
恩智浦半導體正式加入RT-Thread全球合作伙伴計劃!
《RT-Thread設備驅動開發指南》基礎篇--以先楫bsp的hwtimer設備為例

RT-Thread設備驅動開發指南基礎篇—以先楫bsp的hwtimer設備為例






 工商網監
工商網監
評論