") 步進(jìn)電機(jī)S型曲線加減速的實(shí)現(xiàn)
步進(jìn)電機(jī)S型曲線加減速的實(shí)現(xiàn)
之前做電機(jī)相關(guān)的項(xiàng)目比較少,最近有個(gè)項(xiàng)目涉及到步進(jìn)電機(jī)的精確控制,參考了一些資料研究了一下S型曲線加減速,這里總結(jié)一下分享給大家。
STM32定時(shí)器輸出PWM,控制驅(qū)動(dòng)器來驅(qū)動(dòng)步進(jìn)電機(jī)。單片機(jī)只要控制電機(jī)方向,以及PWM的頻率即可,具體驅(qū)動(dòng)由驅(qū)動(dòng)器實(shí)現(xiàn)。 首先說一下什么是S型曲線加速,為什么要S型曲線加速。
S型曲線加速是指步進(jìn)電機(jī)的啟動(dòng)速度按照S型曲線逐漸增加,以達(dá)到設(shè)定的最大速度。具體的S型曲線方程如下:
 x取值-5~5的曲線圖如下:
x取值-5~5的曲線圖如下: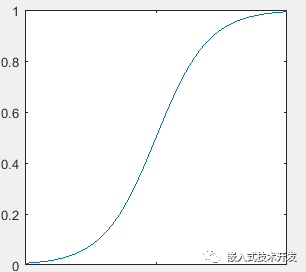 可以看到,剛開始加速和達(dá)到最大速度時(shí)加速比較緩慢,中間加速比較快。電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速的乘積的k倍等于功率,也就是說,功率一定的時(shí)候,轉(zhuǎn)速與轉(zhuǎn)矩成反比關(guān)系。所以,轉(zhuǎn)速越低,轉(zhuǎn)矩越大。當(dāng)電機(jī)直接高速啟動(dòng)時(shí),電機(jī)可能存在震動(dòng)、丟步甚至啟動(dòng)不起來的情況。因此需要S型曲線加速,使電機(jī)能夠緩慢啟動(dòng)。程序?qū)崿F(xiàn)控制電機(jī)的速度,其實(shí)就是控制PWM的輸出頻率。首先需要對S曲線方程進(jìn)行一些變化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )
可以看到,剛開始加速和達(dá)到最大速度時(shí)加速比較緩慢,中間加速比較快。電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速的乘積的k倍等于功率,也就是說,功率一定的時(shí)候,轉(zhuǎn)速與轉(zhuǎn)矩成反比關(guān)系。所以,轉(zhuǎn)速越低,轉(zhuǎn)矩越大。當(dāng)電機(jī)直接高速啟動(dòng)時(shí),電機(jī)可能存在震動(dòng)、丟步甚至啟動(dòng)不起來的情況。因此需要S型曲線加速,使電機(jī)能夠緩慢啟動(dòng)。程序?qū)崿F(xiàn)控制電機(jī)的速度,其實(shí)就是控制PWM的輸出頻率。首先需要對S曲線方程進(jìn)行一些變化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )-
Fcurrent為計(jì)算出的當(dāng)前頻率。
-
Fmin為加速的起始頻率。
-
Fmax為加速的最大頻率。
-
-Flexible*(i - num)/num是對S型曲線進(jìn)行拉伸變化,其中Flexible代表S曲線區(qū)間(越大代表壓縮的最厲害,中間加速度越大;越小越接近勻加速。理想的S曲線的取值為4-6)。
-
i是在循環(huán)計(jì)算過程中的索引,從0開始。
-
num為 加速脈沖數(shù)/2 大小。
TIM2_CLOCK_FREQ為定時(shí)器的計(jì)數(shù)頻率。 之后要做的就是在加減速過程中,每輸出一個(gè)PWM脈沖,重新裝載一次定時(shí)器周期。具體怎樣輸出指定個(gè)數(shù)PWM來控制步進(jìn)電機(jī),可參考之前的文章《STM32定時(shí)器產(chǎn)生指定個(gè)數(shù)脈沖》。在PWM中斷中,將計(jì)算好的S曲線數(shù)組,重新裝載到定時(shí)器的ARR和CCR寄存器中即可。程序如下://功能:S加速曲線初始化//參數(shù)1 *pbuff 計(jì)算出的定時(shí)器的周期//參數(shù)2 fre_max 最大頻率 Hz//參數(shù)3 fre_min 最小頻率 Hz//參數(shù)4 len 加速需要的脈沖數(shù)void CurveS_init(uint16_t *pbuff,uint32_t fre_max,uint32_t fre_min,int16_t len){int16_t i;uint16_t flexible =4;floatdelt=fre_max-fre_min;floatdeno;float melo ;floatfre;for(i=0; i{melo = flexible* (i-len/2) / (len/2);deno = 1.0f / (1 + expf(-melo)); //fre = delt * deno + fre_min;*pbuff++ = (unsigned short)(TIM2_CLOCK_FREQ / fre);}}
//PWM回調(diào)函數(shù)void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim){Motor.PWMcount++;SpeedAdjust();//速度調(diào)節(jié)}//速度調(diào)節(jié)函數(shù)void SpeedAdjust(void){switch(Motor.Status){/*加速*/case SPEED_INCREASE:if(Motor.Count < Motor.CountMax){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//計(jì)算下一個(gè)PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;//占空比50%Motor.Count++;//加速次數(shù)}else{Motor.Status = SPEED_STABLE;Motor.Count--;}break;/*勻速*/case SPEED_STABLE:if(Motor.PWMcount >= (Motor.PWMneed - Motor.Count)){Motor.Status = SPEED_DECREASE;}break;/*減速*/case SPEED_DECREASE:if(Motor.Count >= 0){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//計(jì)算下一個(gè)PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;Motor.Count--;}if(Motor.PWMcount >= Motor.PWMneed){HAL_TIM_PWM_Stop_IT(&htim2,TIM_CHANNEL_1);}break;default :break;}
其中Motor是自己定義的一個(gè)結(jié)構(gòu)體:
啟動(dòng)時(shí),初始化參數(shù),啟動(dòng)定時(shí)器輸出PWM即可:typedef struct{uint8_t Status; //狀態(tài)int32_t Count; //加減速過程脈沖計(jì)數(shù)int32_t CountMax; //最大加速脈沖數(shù)uint32_t PWMcount;//PWM計(jì)數(shù)uint32_t PWMneed; //需要輸出的PWM總數(shù)}Motor_t;
來看一下效果,可以看到,PWM的頻率是逐漸增大的。實(shí)際測試效果也不錯(cuò)。//PWM--需要輸出的脈沖個(gè)數(shù)void StartPWM(uint32_t PWM){Motor.PWMcount = 0;Motor.PWMneed = PWM;Motor.Count = 0;Motor.Status = SPEED_INCREASE;Motor.CountMax = 300;//初始化加速曲線,最小頻率100,最大頻率10K,加速脈沖數(shù)300CurveS_init(Period,10000,100,Motor.CountMax);__HAL_TIM_SET_AUTORELOAD(&htim2,Period[0]);htim2.Instance->CCR1 = Period[0];HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); //啟動(dòng)定時(shí)器PWM輸出}
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
53文章
8263瀏覽量
146682 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3115瀏覽量
147649
原文標(biāo)題:步進(jìn)電機(jī)S型曲線加速的實(shí)現(xiàn)
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
減速電機(jī)概述了解多少?
減速微型電機(jī)等。
按用途 :可分為驅(qū)動(dòng)用微型減速電機(jī)和控制用微型減速電機(jī)。前者包括電動(dòng)工具用微型
發(fā)表于 12-23 15:16
行星減速步進(jìn)電機(jī)與步進(jìn)電機(jī)的區(qū)別
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī)。其工作原理是通過電子電路將直流電分為多相序控制電流,使用這種電流給步進(jìn)電機(jī)供電

減速電機(jī)該如何分類?
的分類方式: 按減速機(jī)構(gòu)的類型分類 : 齒輪減速電機(jī):使用齒輪組來降低轉(zhuǎn)速,是最常用的減速電機(jī)類型。 行星
步進(jìn)電機(jī)如何在加減速過程中控制技術(shù)?
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的電機(jī),廣泛應(yīng)用于各種自動(dòng)化控制系統(tǒng)中。在加減速過程中,步進(jìn)
步進(jìn)電機(jī)型號(hào)與步進(jìn)電機(jī)命名規(guī)則
混合式步進(jìn)電機(jī)代碼:SM。
系列代碼:H、高性能二相步進(jìn)電機(jī);C、三相步進(jìn)電機(jī);E、五相

減速步進(jìn)電機(jī)工作原理你知道多少?
減速步進(jìn)電機(jī)是一種將電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為齒輪的直線運(yùn)動(dòng)的電機(jī)。它的結(jié)構(gòu)包括固定部分、旋轉(zhuǎn)部分和傳動(dòng)部分。

伺服電機(jī)加減速機(jī)慣量怎么計(jì)算
伺服電機(jī)加減速機(jī)系統(tǒng)是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中常見的一種傳動(dòng)裝置,它通過將伺服電機(jī)的高速旋轉(zhuǎn)轉(zhuǎn)化為減速機(jī)的低速大扭矩輸出,實(shí)現(xiàn)對負(fù)載的精確控制。
stm32控制步進(jìn)電機(jī)加減速的穩(wěn)定性?
各位:
我最近接了一個(gè)項(xiàng)目做agv小車的驅(qū)動(dòng)部分。使用兩個(gè)定時(shí)器和io配合輸出脈沖,控制步進(jìn)電機(jī)。控制上沒問題,但是加減速和轉(zhuǎn)彎的過程不是很平穩(wěn),放一杯水在上邊晃動(dòng)的很厲害。我是用的方法就是勻速變化
發(fā)表于 05-06 07:21
STM32的電機(jī)庫適合用來做步進(jìn)電機(jī)嗎? 里面包含有加減速算法沒呢?
STM32 的電機(jī)庫 適合用來做步進(jìn)電機(jī)嗎? 里面包含有加減速算法沒呢?
發(fā)表于 05-06 07:02
如何用stm32f103zet6控制伺服電機(jī)的加減速運(yùn)動(dòng)?
想用stm32f103zet6控制伺服電機(jī)的加減速運(yùn)動(dòng),不知該怎么做,請大神指教。具體情況是有個(gè)機(jī)械凸輪,有一根頂桿頂著凸輪邊沿,隨著凸輪轉(zhuǎn)動(dòng)及其外徑的變化,水平頂桿會(huì)沿水平方向作直線運(yùn)動(dòng)。現(xiàn)在可以
發(fā)表于 04-30 08:00
步進(jìn)電機(jī)如何減速?
步進(jìn)電機(jī)是一種直接將電脈沖轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的機(jī)電裝置,通過控制施加在電機(jī)線圈上的電脈沖順序、 頻率和數(shù)量, 可以實(shí)現(xiàn)對步進(jìn)

如何快速開發(fā)高性能步進(jìn)電機(jī)控制驅(qū)動(dòng)系統(tǒng)RS485 UART通訊Modebus協(xié)議防丟步節(jié)能靜音驅(qū)動(dòng)TMCM1290
實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)控制邏輯,提高系統(tǒng)的自動(dòng)化水平。
三、高級(jí)功能
EightPoint加減速曲線:TMCM-1290采用EightPoint加減速曲線
發(fā)表于 03-10 20:44
混合式步進(jìn)電機(jī)的結(jié)構(gòu)圖
混合式步進(jìn)電機(jī)(Hybrid Stepper Motor)結(jié)合了永磁式和變極式步進(jìn)電機(jī)的特點(diǎn),以實(shí)現(xiàn)高性能和高可靠性。 合式
步進(jìn)電機(jī)工作原理 步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別
的應(yīng)用,如打印機(jī)、數(shù)控機(jī)床等。 步進(jìn)電機(jī)的工作原理可以分為兩種類型:可變磁場型步進(jìn)電機(jī)和磁轉(zhuǎn)子型
解析步進(jìn)電機(jī)三軸聯(lián)動(dòng)的快速加減速算法研究
步進(jìn)電機(jī)具有快速啟停能力強(qiáng)、高、轉(zhuǎn)速容易控制的特點(diǎn)。但是,步進(jìn)電動(dòng)機(jī)應(yīng)避免轉(zhuǎn)動(dòng)速率的突變,而且從停止到開始轉(zhuǎn)動(dòng)有一個(gè)較低的起動(dòng)頻率,隨后才可以平緩地過渡到較高的轉(zhuǎn)速。相應(yīng)地在步進(jìn)
發(fā)表于 01-19 14:55
?1475次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論