") 基于BMTI高可靠SPARC處理器的智能控制系統設計
基于BMTI高可靠SPARC處理器的智能控制系統設計
1.摘要
為了解并研究火星探測相關技術,本項目以北京航天微電子科技的BM3823微處理器為核心處理器,結合其高可靠性高抗輻射的特性,設計實現了一個具備基本功能的仿真“火星車”平臺。該平臺最大化利用BM3823外設資源,用GPIO實現紅外檢測、超聲測距等,用UART中斷實現遠程控制、數據回傳,制定了相關串口傳輸協議,用IIC實現機械臂舵機組控制、OLED顯示和環(huán)境感知,用定時器中斷實現二級線程劃分,包括通訊線程與控制線程,用SPI轉CAN實現了車體控制。整合上述相關資源,實現遠程控制、圖像回傳、機械臂遙控抓取、系統狀態(tài)監(jiān)測、環(huán)境感知、智能避障等多種功能。
2.作品背景
天問一號火星探測器在成功抵達火星之后被一分為二,其中一部分繼續(xù)圍繞火星的軌道繼續(xù)繞行,而另一部分攜帶著“祝融號”火星車成功著陸火星表面,2021年5月17日,祝融號火星車首次通過環(huán)繞器傳回遙測數據。2021年 5月22日10時40分,“祝融號”火星車已安全駛離著陸平臺,到達火星表面,開始巡視探測。隨著一系列的壯舉完成之后,宣告著我國正式開啟了對于火星的探索。
3.作品意義
在BMTI高可靠300MHz處理器SPARC處理器的基礎上,擴展子板系統,構建一種智能控制系統,通過系統方案設計,旨在最大化利用處理器資源。根據目前航天需求,結合航天中的復雜環(huán)境,設計一種“火星車”,可以應對復雜環(huán)境,并可實現基本功能需求。本項目以火星車為研究對象,結合火星車在火星上執(zhí)行任務的特點,設計開發(fā)相應功能Demo,對火星車控制技術技術研究開發(fā)有積極的探索和啟蒙意義。
4.作品介紹
4.1 系統架構
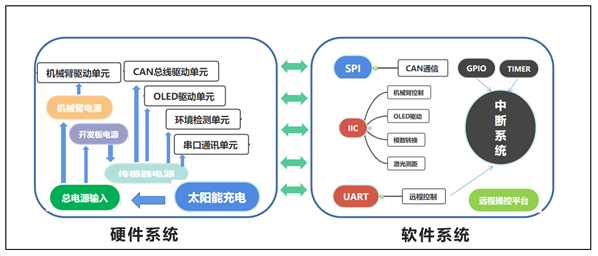
系統架構圖如上圖所示,整個系統分為硬件系統和軟件系統,我們根據整個系統的功能需求,確定了系統的電壓等級與電流裕量,設計了電源系統,主要用于核心板的供電、“火星車”車體的供電、機械臂供電與外圍傳感器電路供電。根據每個功能模塊設計了對應的電路子板,并在各個子板的基礎上,編寫了響應的驅動代碼,旨在通過使用BM3823開發(fā)板實現相應功能,并最大化利用BM3823資源。除此之外,我們采用庫函數編程思想,對BM3823的絕大多數基礎外設資源進行了函數封裝,并一一進行了穩(wěn)定性測試,可最大化減少后續(xù)人員的開發(fā)時間,提升開發(fā)效率。
4.2 實現功能
遠程行駛
用戶可通過遠程控制端實現遠程控制功能,可控制“火星車”的基本運動,包括前進、后退、左轉、右轉,同時可控制車體的運行速度與車體前置燈光,用戶可下發(fā)“漫游”命令,使“火星車”以自動避障狀態(tài)行駛,也可下發(fā)機械臂控制指令,實現機械臂的控制。
系統狀態(tài)回傳及監(jiān)測
系統狀態(tài)可以通過無線串口回傳至上位機,具體包括“火星車”移速與轉速反饋、故障反饋、電機溫度反饋、燈光狀態(tài)反饋、測距反饋、控制指令反饋等,其中故障反饋又包括電池欠壓故障、電機通訊故障、電機過流故障等,用戶可通過遙控遠程清除故障。
機械臂遙控抓取
為滿足火星探測任務,設計了車載機械臂,機械臂驅動與BM3823開發(fā)板通過IIC通訊,可使用遙控器遠程控制機械臂,機械臂上搭載攝像頭,可以實時圖傳,從而實現抓取任務。
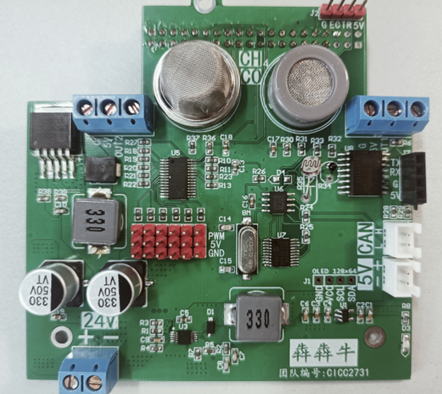
環(huán)境感知
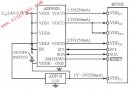
為滿足火星探測任務,設計了氣體檢測單元,包括有可燃氣體檢測、一氧化碳檢測,增設了光敏與熱敏感知單元,可以粗略檢測環(huán)境光與環(huán)境溫度,通過ADC芯片將數據傳輸至開發(fā)板,進而遠程傳輸給用戶控制端,實現基本的環(huán)境感知任務。
4.3 系統設計
4.3.1 硬件設計
“火星車”底盤選型
為了加快該作品關鍵技術研究,結合考慮需要實現的功能以及最后成品的美觀,該項目直接選用了由松靈機器人(深圳)有限公司生產的SCOUT MINI機器人底盤,該底盤是一款全地形高速Mini UGV,具有四輪差速驅動、獨立懸掛、原地差速自轉等功能,非常符合火星車原型的需求,該底盤車載空間極大,可以非常方便的將BM3823開發(fā)板嵌入其中,而且也有富足的空間搭載機械手等“火星任務”設備。該底盤提供了CAN接口的控制方式。供電為24V。
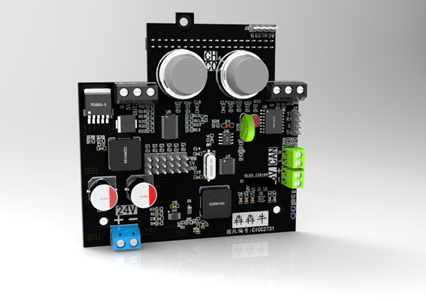
擴展板設計
由于開發(fā)板并未將全部資源以排針形式引出,為了更加方便的擴展外設,自己設計了與開發(fā)板板對板連接的擴展板,其設計效果如下圖所示:
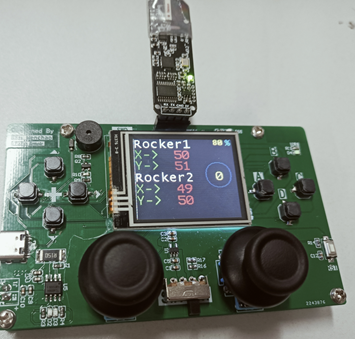
無線遙控器設計
為了完成對“火星車”的遠程遙控操作,采用STM32單片機設計了一款遙控器,其實物圖如下圖所示。
4.3.2 軟件設計
底層庫函數封裝
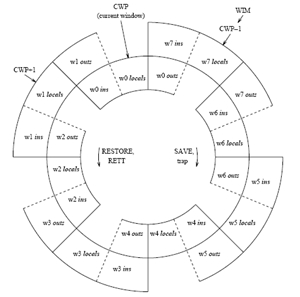
由于所采用處理器是一款基于sparc內核的處理器,也是一款比較小眾的處理器,可查可借鑒資料較少,編程都是基于配置寄存器進行編程,為了使系統的可維護性更高,本作品基于C語言對BM3823的寄存器進行了接口封裝。
應用層軟件設計
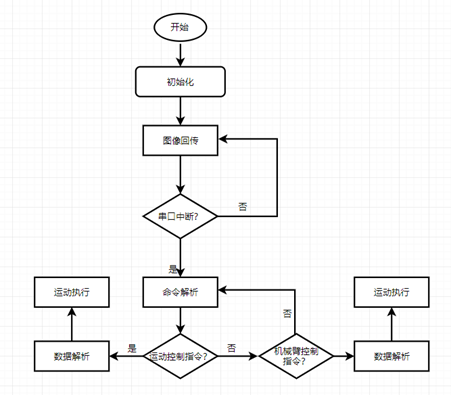
基于BM3823高性能處理器的“火星車”底盤控制為CAN總線控制,控制模式為指令控制,可以直接通過BM3823發(fā)送指令控制車體的移動,指令的接收是通過遙控遠程實現的。車體上電后,BM3823等待遙控指令,并回傳畫面至上位機界面,可實現以下功能:
(1)遙桿控制“火星車”基本運動;
(2)發(fā)送“巡邏”命令實現自動避障;
(3)超聲測距;
(4)燈光控制;
(5)機械臂操控;
(6)故障清除;
(7)數據回傳;
(8)狀態(tài)監(jiān)測。
整體系統流程圖如圖所示:
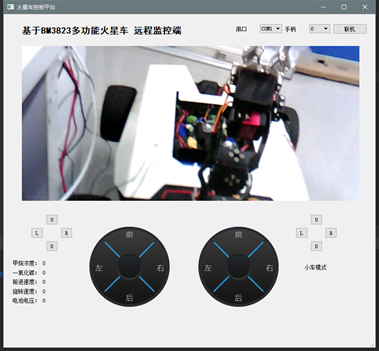
遠程監(jiān)控軟件
由于火星車工作場景的特殊,一般火星車的任務執(zhí)行都是遠程人員操控來完成,因此需要設計一個用于與火星車遠程交互的上位機軟件,我們使用PyQt來完成上位機設計。界面主要包含基本的火星車狀態(tài)信息實時顯示、現場畫面回傳顯示,以及火星車遠程操控,參數設置等人車交互功能。
4.4 系統測試驗證
最后作品的成品圖如圖所示:
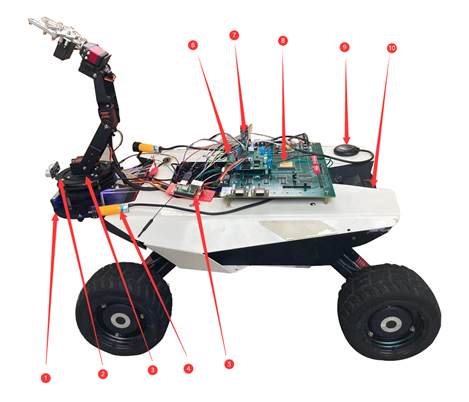
①攝像頭
②超聲波
③機械臂
④光電傳感器
⑤網絡圖傳
⑥子板擴展
⑦無線串口
⑧BM3823開發(fā)板
⑨GPS導航儀
⑩“火星車”底盤
針對最初的功能需求,我們分別對無線遙控、實時圖傳、基礎避障、上位機顯示以及機械臂抓取進行了實驗,實驗結果表明,基本達到了預期要求。
審核編輯 :李倩
-
微處理器
+關注
關注
11文章
2272瀏覽量
82624 -
電源系統
+關注
關注
3文章
627瀏覽量
37837
原文標題:【2021集創(chuàng)賽作品分享】第十六期 | 基于BMTI高可靠SPARC處理器的智能控制系統設計
文章出處:【微信號:Ithingedu,微信公眾號:安芯教育科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
太陽能LED照明控制系統處理器的設計

怎么通過sparc了解intel homologos處理器
提高DCS控制系統電源可靠性的方案
抗輻射SPARC處理器在航天應用中有什么優(yōu)勢?
基于ARM與GPRS的家庭智能控制系統
REMS操作系統在SPARC-V8處理器上的應用
基于Rabbit2000微處理器的網絡消防報警控制系統
SPARC微處理器綜合介紹
基于Blackfin BF50x處理器的電機驅動控制系統
SPARC V8結構嵌入式微處理器的軟件集成開發(fā)環(huán)境總體設計

關于SPARC微處理器綜述
sparc處理器的特點和系統架構






 工商網監(jiān)
工商網監(jiān)
評論