 機器人視覺抓取問題出現的原因和解決方法
機器人視覺抓取問題出現的原因和解決方法
最近視覺抓件系統一直會出現抓取零件不到位的問題.下面我將分析一下問題出現的原應.
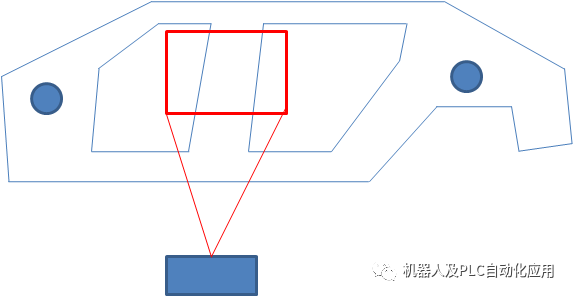
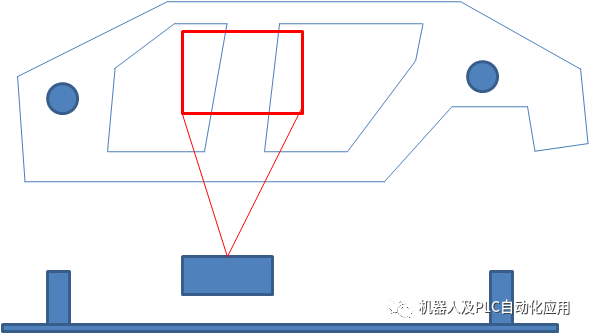
單相機測點,測量車身側圍外板B /內板B,計算出的車身整體偏差值是B柱的旋轉和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現這種問題.因此要區分對待側圍內板和側圍外部的抓取視覺的計算方法.
1.車身側圍內板:
應設置兩個相機對應機器人抓手上的定位銷附近,計算兩個定位空的偏差值.由于機器人抓手是固定的所以,要計算出兩空的變化對應車身坐標系的整體變化值.這樣計算出的機器人BASE坐標系下的偏差值最準確,機器人的抓取效果最好。
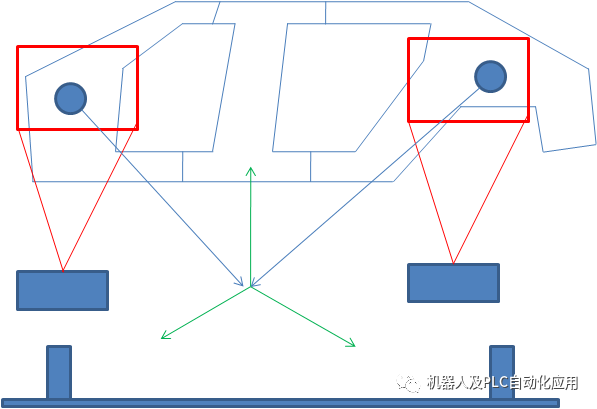
如果機器人抓手不使用定位銷定位,則可以使用一個相機的方法進行粗略抓取,問題會很少。
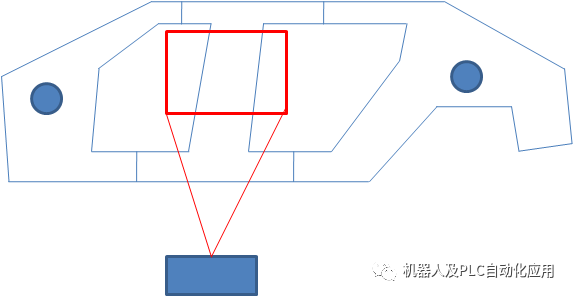
2.車身側圍外板:
側圍外板是一個整體件,用一個相機照車身B柱是沒有問題的.整體大件由于不需要搭接工藝,因此可以使用一個相機和定位銷定位抓取的方法.
審核編輯:郭婷
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28455瀏覽量
207266 -
相機
+關注
關注
4文章
1353瀏覽量
53649
原文標題:機器人視覺抓取問題分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
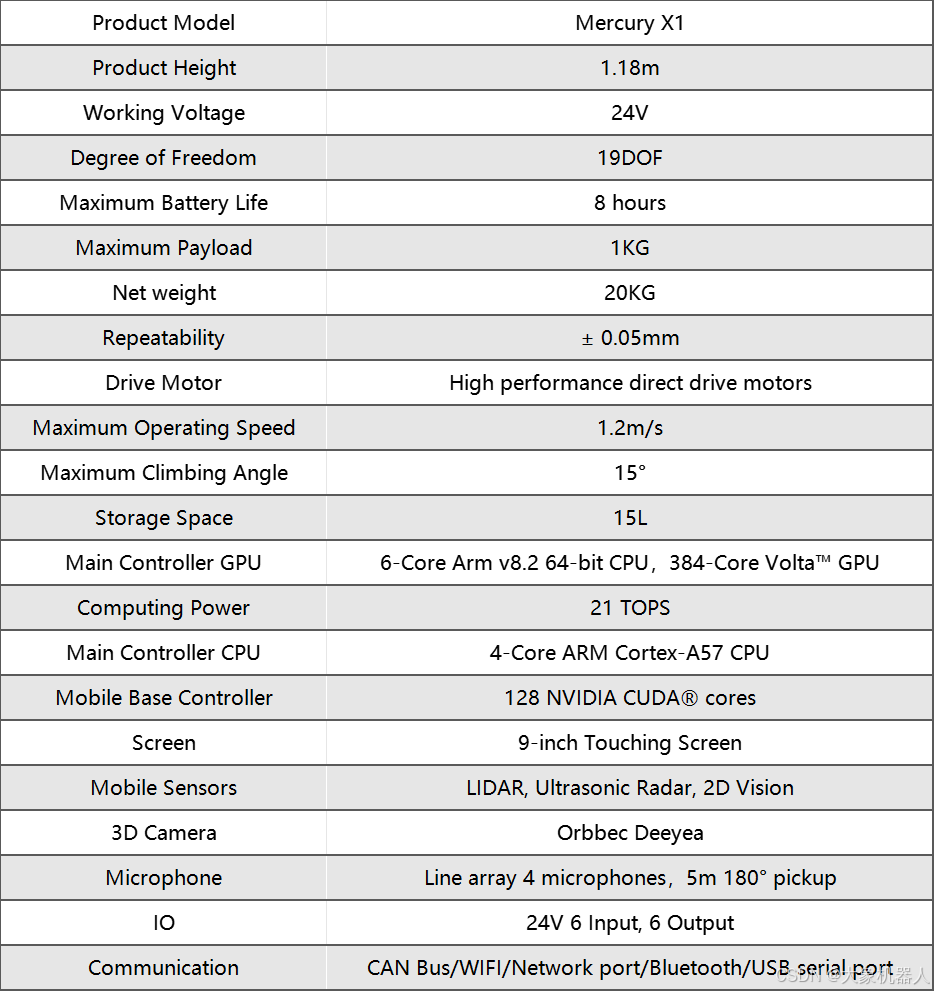
水星Mercury X1輪式人形機器人結合openc算法&STag標記碼視覺系統實現精確抓取!
本案例展示了如何利用視覺系統提升機械臂的抓取精度,成功實現了人形機器人的雙臂抓取不在局限于單臂抓取。 引言 如今市面上已經有了許多不同類型的
工業機器人視覺技術的應用分為哪幾種?
,機器人可以識別和定位物體的位置、形狀、顏色等特征。這些信息可以用于機器人的導航、抓取、裝配等任務。 1.1 顏色識別 顏色識別是物體識別的一種常見方法。通過分析物體表面的顏色信息,
機器人視覺技術中常見的圖像分割方法
機器人視覺技術中的圖像分割方法是一個廣泛且深入的研究領域。圖像分割是將圖像劃分為多個區域或對象的過程,這些區域或對象具有某種共同的特征,如顏色、紋理、形狀等。在機器人
機器人視覺與計算機視覺的區別與聯系
,而計算機視覺則更側重于從圖像和視頻中提取信息。盡管它們在某些方面有所重疊,但它們在目標、方法和應用上存在明顯差異。 2. 機器人視覺概述 機器人
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
機器人視覺技術中圖像分割方法有哪些
機器人視覺技術是人工智能領域的一個重要分支,它涉及到圖像處理、模式識別、機器學習等多個學科。圖像分割是機器人視覺技術中的一個重要環節,它的目
機器人視覺的應用范圍
機器人視覺是一種將計算機視覺技術應用于機器人領域的技術,它使得機器人能夠感知和理解周圍環境,實現自主決策和執行任務。隨著人工智能、
常見的錫珠形成的原因和解決方法
及時進行處理的話可能會影響到板子的使用壽命和使用可靠性,下面深圳佳金源錫膏廠家給大家簡單介紹一下常見的錫珠形成的原因和解決方法:一、形成原因1、感應熔敷在焊接加熱

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服的實時性.經測試,該平臺能夠對視覺檢測目標的
發表于 05-29 16:17
富唯智能案例|3D視覺引導機器人抓取鞋墊上下料
隨著制造業對自動化、智能化需求的不斷提升,如何實現鞋墊上下料的精準、高效操作成為了企業亟待解決的問題。傳統的上下料方式往往依賴人工,存在效率低下、精度不足等問題。而富唯智能的3D視覺引導機器人抓取解決方案,則能夠有效解決這些問題

視覺機器人焊接的研究現狀
視覺機器人焊接技術是將計算機視覺與機器人技術相結合,實現自動焊接過程中的實時檢測、跟蹤和控制。這一領域的研究一直處于不斷發展之中,吸引了眾多研究人員和工程師的關注。本文將就

步進電機丟步的原因和解決方法
步進電機丟步的原因和解決方法 步進電機是一種常見的電動機類型,特點是可以實現精確的位置控制和旋轉運動。然而,在實際使用過程中,步進電機有時會出現丟步的現象,即無法按照預定步長準確移動。這種情況可能會
富唯智能機器人集成了協作機器人、移動機器人和視覺引導技術
智能機器人還集成了協作機器人、移動機器人和視覺引導技術,具有物料高精度抓取或放置功能,可滿足各種復雜場景的協作搬運需求。





 工商網監
工商網監
評論