") 冗余EPS關(guān)鍵技術(shù)解析
冗余EPS關(guān)鍵技術(shù)解析
引言
在乘用車(chē)領(lǐng)域,電動(dòng)助力轉(zhuǎn)向系統(tǒng)(Electric Power Steering,EPS)相比傳統(tǒng)的液壓助力轉(zhuǎn)向系統(tǒng)(Hydraulic Power Steering,HPS)具有結(jié)構(gòu)簡(jiǎn)單、響應(yīng)迅速、能耗低等優(yōu)點(diǎn),因此應(yīng)用很廣。隨著智能駕駛的發(fā)展,作為底層執(zhí)行系統(tǒng)的電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)也迎來(lái)了新的機(jī)遇與挑戰(zhàn)。為了滿(mǎn)足L3級(jí)以上自動(dòng)駕駛的需求,同時(shí)提升智能駕駛的駕駛體驗(yàn)、安全性、可靠性等,要求電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)在發(fā)生單點(diǎn)失效的情況下,依然具備一定的助力能力。因此,冗余電動(dòng)助力轉(zhuǎn)向系統(tǒng),即冗余EPS,成為L(zhǎng)3級(jí)以上智能駕駛系統(tǒng)的關(guān)鍵零部件。本文主要介紹冗余EPS的發(fā)展路徑和關(guān)鍵技術(shù)。
一、轉(zhuǎn)向技術(shù)發(fā)展路徑
轉(zhuǎn)向系統(tǒng)是汽車(chē)底盤(pán)的關(guān)鍵部件之一,對(duì)于汽車(chē)的操穩(wěn)性、安全性、舒適性起到至關(guān)重要的作用。隨著汽車(chē)工業(yè)電動(dòng)化的深入,轉(zhuǎn)向系統(tǒng)經(jīng)歷了從機(jī)械轉(zhuǎn)向系統(tǒng)(MS)、機(jī)械液壓轉(zhuǎn)向助力系統(tǒng)(HPS)到電子液壓助力轉(zhuǎn)向系統(tǒng)(EHPS)、電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)的發(fā)展歷程。相比機(jī)械和液壓轉(zhuǎn)向系統(tǒng),電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)的結(jié)構(gòu)更加簡(jiǎn)單、助力控制響應(yīng)更快,同時(shí)能耗也更低,而且不需要保養(yǎng)和維護(hù),大大提升了用戶(hù)的駕駛體驗(yàn)。汽車(chē)工業(yè)電動(dòng)化的同時(shí),智能化成為了轉(zhuǎn)向技術(shù)發(fā)展新的驅(qū)動(dòng)力。為了更好地滿(mǎn)足自動(dòng)駕駛的需求,轉(zhuǎn)向系統(tǒng)需要有更高的安全性和可靠性,從而保證轉(zhuǎn)向系統(tǒng)在出現(xiàn)電氣系統(tǒng)故障的時(shí)候整車(chē)仍然可以進(jìn)入安全狀態(tài)甚至繼續(xù)安全駕駛。因此,冗余EPS、線(xiàn)控轉(zhuǎn)向系統(tǒng)(SBW)開(kāi)始進(jìn)入人們的視野。其中線(xiàn)控轉(zhuǎn)向(SBW)相比冗余EPS最大區(qū)別在于方向盤(pán)和執(zhí)行機(jī)構(gòu)之間無(wú)機(jī)械連接,因此在成本控制、設(shè)計(jì)靈活性、功能豐富性、空間布置等方面具有明顯優(yōu)勢(shì)。
轉(zhuǎn)向系統(tǒng)作為底盤(pán)核心零部件,具有很高的技術(shù)壁壘。我國(guó)汽車(chē)工業(yè)起步相對(duì)較晚,因此當(dāng)前德國(guó)、美國(guó)、日本、韓國(guó)的供應(yīng)商巨頭仍然占據(jù)著轉(zhuǎn)向系統(tǒng)的大部分市場(chǎng),尤其是冗余EPS和線(xiàn)控轉(zhuǎn)向系統(tǒng),國(guó)內(nèi)仍然處于追趕的狀態(tài)。但是隨著國(guó)內(nèi)汽車(chē)產(chǎn)業(yè)鏈的日漸成熟,一些企業(yè)也開(kāi)始逐步掌握轉(zhuǎn)向系統(tǒng)的核心技術(shù),未來(lái)有望快速提升所占的市場(chǎng)份額。
二、?轉(zhuǎn)向技術(shù)發(fā)展路徑
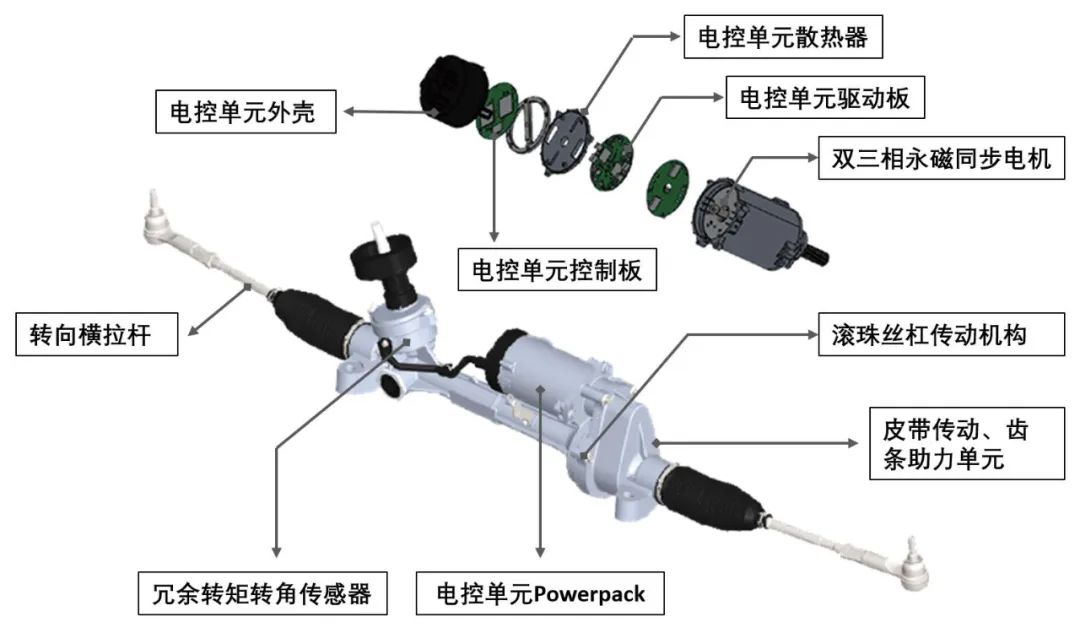
? 冗余EPS系統(tǒng)主要由機(jī)械系統(tǒng)部件、轉(zhuǎn)矩轉(zhuǎn)角傳感器總成(TAS)以及電控單元(Powerpack)組成,如圖2-1所示。以皮帶傳動(dòng)齒條助力轉(zhuǎn)向系統(tǒng)(R-EPS)為例,機(jī)械系統(tǒng)主要由齒輪齒條副、滾珠絲杠傳動(dòng)機(jī)構(gòu)、皮帶傳動(dòng)單元、轉(zhuǎn)向橫拉桿等組成。可支持的最大齒條力達(dá)到16kN以上,能夠滿(mǎn)足豪華轎車(chē)、SUV以及商務(wù)車(chē)的要求。轉(zhuǎn)矩轉(zhuǎn)角傳感器總成用于檢測(cè)轉(zhuǎn)向扭矩和方向盤(pán)轉(zhuǎn)角,主流的冗余傳感器方案通常能夠提供4路轉(zhuǎn)矩信號(hào)和2路轉(zhuǎn)角信號(hào),顯著提升了安全性。電控單元是冗余EPS的核心部分,由助力電機(jī)以及驅(qū)動(dòng)和控制單元組成,助力電機(jī)通常采用六相或十二相無(wú)刷直流電機(jī),由于單點(diǎn)失效導(dǎo)致其中三相無(wú)法正常驅(qū)動(dòng)時(shí),剩余部分仍可正常工作,為轉(zhuǎn)向系統(tǒng)提供助力。驅(qū)動(dòng)和控制單元集成在電機(jī)的后端,由驅(qū)動(dòng)板、控制板、散熱器、外殼等組成。
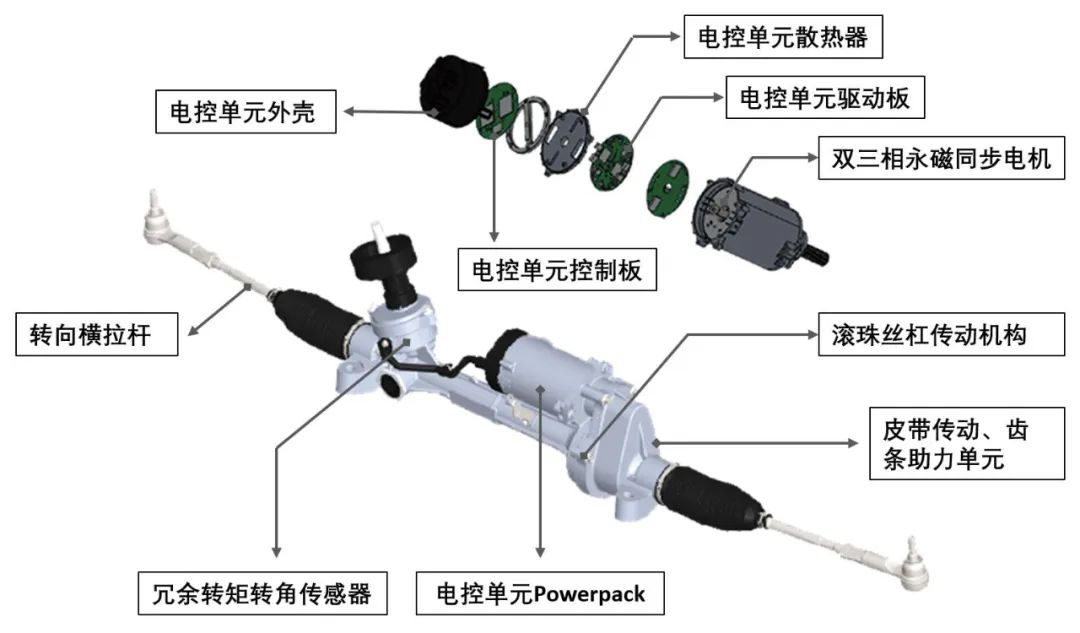
圖2-1 冗余EPS系統(tǒng)方案示意圖
基于雙三相無(wú)刷直流電機(jī)的全冗余電控方案如圖2-2所示,整個(gè)方案采用了雙路獨(dú)立外部供電、雙路外部CAN/CANFD通信以及冗余的轉(zhuǎn)矩、轉(zhuǎn)角傳感器信號(hào)。電機(jī)驅(qū)動(dòng)單元、電機(jī)位置傳感器、電源管理單元、主控MCU也都采用了雙備份的冗余架構(gòu)。主控MCU采用帶鎖步核的32位芯片,具有較高的算力,同時(shí)最高支持ASIL-D功能安全等級(jí)。雙MCU之間采用CANFD通信,實(shí)現(xiàn)信號(hào)交互、力矩指令傳遞、故障診斷信號(hào)交互等,可以起到相互監(jiān)控的作用,必要時(shí)支持主輔切換,提升了整個(gè)系統(tǒng)的安全性和可靠性。
根據(jù)《GB/T 40429-2021 汽車(chē)駕駛自動(dòng)化分級(jí)》對(duì)于L3級(jí)自動(dòng)駕駛的定義,車(chē)輛在有條件設(shè)計(jì)運(yùn)行范圍內(nèi)運(yùn)行,允許駕駛員注意力離開(kāi)駕駛?cè)蝿?wù),但是在系統(tǒng)提示需要接管的時(shí)候應(yīng)該進(jìn)行適當(dāng)?shù)捻憫?yīng)。基于上述冗余方案,電氣系統(tǒng)在出現(xiàn)單點(diǎn)失效的場(chǎng)景下,最多損失50%的助力能力,因此對(duì)于大部分限定條件下的L3級(jí)自動(dòng)駕駛功能,能夠保證整車(chē)在系統(tǒng)提示接管到駕駛員完成階段的時(shí)間段處于安全狀態(tài)。
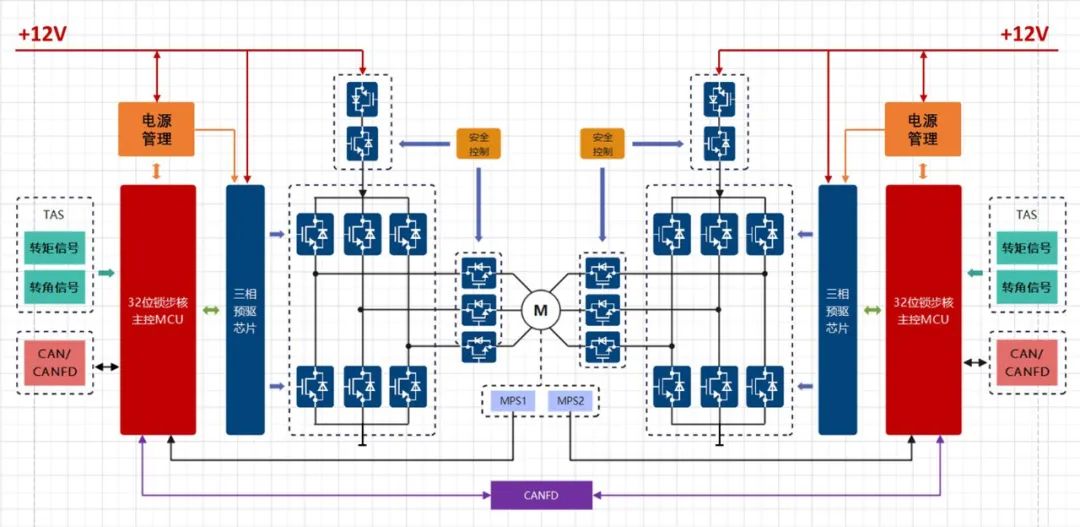
圖2-2 冗余EPS電控方案示意圖
三、冗余EPS關(guān)鍵技術(shù)
3.1 冗余策略與安全機(jī)制
如圖3-1所示為冗余EPS的雙MCU架構(gòu)。雙MCU(ECU A和ECU B)都實(shí)現(xiàn)完整控制功能,上電初始化后默認(rèn)分配主從角色。正常工作狀態(tài)下,雙系統(tǒng)均進(jìn)行力矩指令計(jì)算,但是從系統(tǒng)響應(yīng)主系統(tǒng)分配的扭矩指令。如果系統(tǒng)發(fā)生單點(diǎn)失效,雙MCU根據(jù)故障診斷與處理機(jī)制判斷是否進(jìn)行主從切換,必要時(shí)從系統(tǒng)切換為主系統(tǒng)。
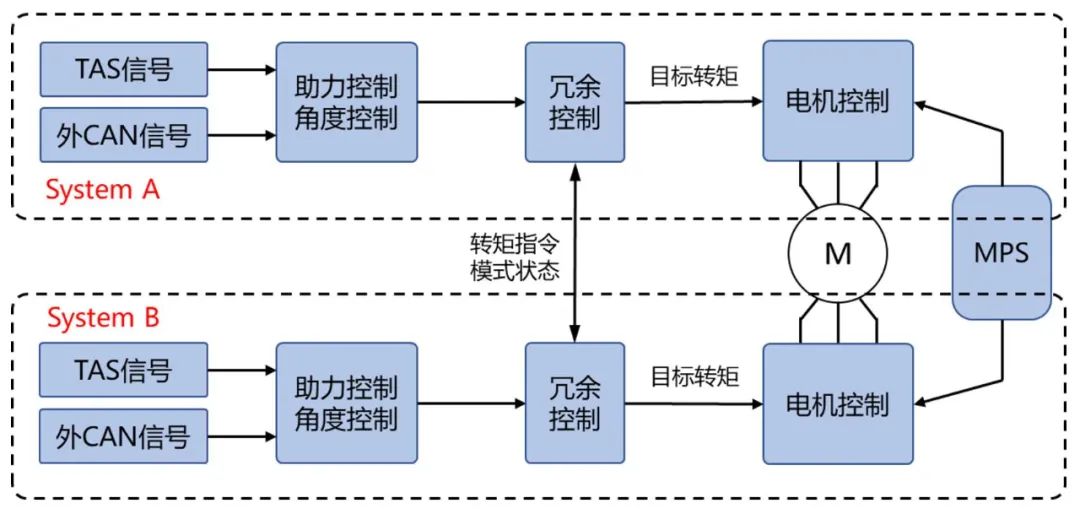
圖3-1 冗余策略與安全機(jī)制示意圖
3.2 基礎(chǔ)助力算法
基礎(chǔ)助力算法的主要作用是為駕駛員提供助力同時(shí)保證駕駛員具有良好的駕駛手感,其算法架構(gòu)如圖3-2所示。
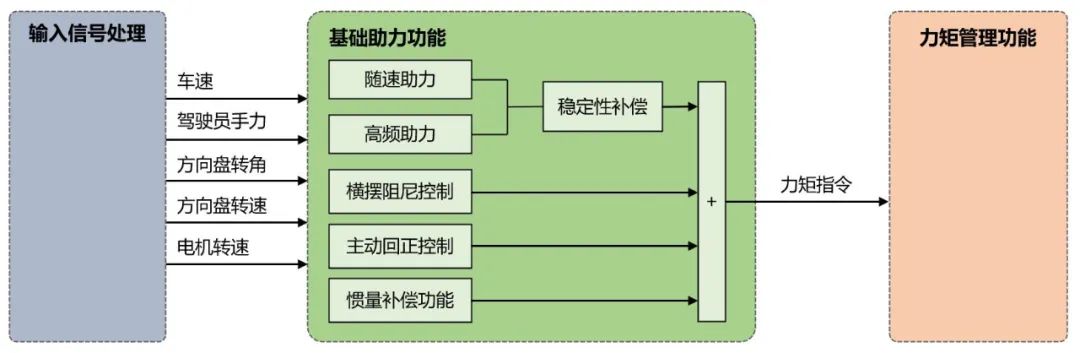
圖3-2 基礎(chǔ)助力算法架構(gòu)
基礎(chǔ)助力算法包含隨速助力、高頻助力、穩(wěn)定性補(bǔ)償、橫擺阻尼控制、主動(dòng)回正控制以及慣量補(bǔ)償?shù)饶K,各個(gè)算法模塊作用如下:
隨速助力:提供隨車(chē)速變化的助力,提供駕駛員中間位置感覺(jué),中心區(qū)域到兩側(cè)要使駕駛員有力的建立的感覺(jué);
高頻助力:能夠消除系統(tǒng)的慣性,減少粘性和提高應(yīng)答性,并消除反向或快速轉(zhuǎn)向時(shí)的助力延遲;
穩(wěn)定性補(bǔ)償:在低頻段保持真實(shí)的手感;中頻段降低系統(tǒng)增益,防止系統(tǒng)共振;高頻段提升系統(tǒng)的相位裕度,增加穩(wěn)定性和快速性。
橫擺阻尼控制:增加系統(tǒng)的穩(wěn)定性,防止方向盤(pán)在回正過(guò)程中出現(xiàn)“搖頭”現(xiàn)象。
主動(dòng)回正控制:主動(dòng)回正控制在車(chē)速較低時(shí)給系統(tǒng)一個(gè)額外的回正力,提升駕駛員的駕駛體驗(yàn)。
慣量補(bǔ)償控制:計(jì)算電機(jī)慣量補(bǔ)償力矩,并疊加到助力力矩上,使得電機(jī)的慣量不影響轉(zhuǎn)向手感。
3.3 高級(jí)助力功能
高級(jí)助力功能在基礎(chǔ)助力的基礎(chǔ)上進(jìn)一步提升駕駛的舒適性以及安全性,高級(jí)助力算法架構(gòu)如圖3-3所示。
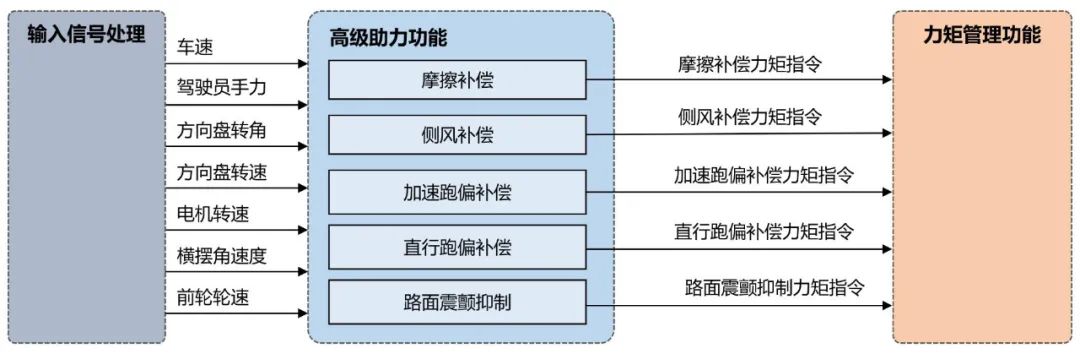
圖3-3 高級(jí)助力算法架構(gòu)
高級(jí)助力算法包含摩擦補(bǔ)償模塊、側(cè)風(fēng)補(bǔ)償模塊、加速跑偏補(bǔ)償模塊、直行跑偏補(bǔ)償模塊、路面震顫抑制模塊等,各個(gè)算法模塊的作用如下:
摩擦補(bǔ)償:摩擦補(bǔ)償功能來(lái)彌補(bǔ)轉(zhuǎn)向系統(tǒng)產(chǎn)生的摩擦從而保證轉(zhuǎn)向力的舒適性;補(bǔ)償目標(biāo)和當(dāng)前轉(zhuǎn)向感覺(jué)之間的差異。
側(cè)風(fēng)補(bǔ)償:遇到較強(qiáng)側(cè)風(fēng)時(shí),應(yīng)具有保證車(chē)輛穩(wěn)定直線(xiàn)行駛的能力,防止側(cè)風(fēng)導(dǎo)致車(chē)輛發(fā)生偏轉(zhuǎn)而偏離直線(xiàn)行駛軌跡。
加速跑偏補(bǔ)償:急加速的過(guò)程中,左右車(chē)輪上的牽引力不一致導(dǎo)致行駛跑偏的時(shí)候,通過(guò)補(bǔ)償來(lái)保持直線(xiàn)行駛。
直行跑偏補(bǔ)償:正常直行過(guò)程中如果存在一定的跑偏現(xiàn)象,可以通過(guò)直行跑偏補(bǔ)償進(jìn)行適當(dāng)緩解。
路面震顫抑制:路面震顫抑制算法檢測(cè)輪速信號(hào),同時(shí)對(duì)手盤(pán)力矩中與輪速頻率正相關(guān)的頻率特征進(jìn)行提取后,在最終施加給電機(jī)的力矩中減掉這一頻率特征信號(hào)與路面震顫進(jìn)行抵消,從而達(dá)到抑制的目的。
3.4 外部請(qǐng)求控制
冗余EPS的外部請(qǐng)求控制功能包含自動(dòng)駕駛相關(guān)的功能以及底盤(pán)穩(wěn)定性相關(guān)的功能。自動(dòng)駕駛相關(guān)的功能有轉(zhuǎn)矩疊加控制(Torque Overlay)、轉(zhuǎn)角疊加控制(Angle Overlay)、絕對(duì)轉(zhuǎn)角控制、泊車(chē)轉(zhuǎn)角控制、方向盤(pán)振動(dòng)提醒等,底盤(pán)穩(wěn)定性相關(guān)的功能包含Driver Steering Recommendation(DSR)功能。不同功能的原理介紹如下:
轉(zhuǎn)矩疊加控制:能夠響應(yīng)智能駕駛控制器要求的疊加扭矩,實(shí)現(xiàn)如車(chē)道保持輔助(LKA)等高級(jí)駕駛輔助(ADAS)功能。轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)矩疊加控制算法需要系統(tǒng)兼顧ADAS功能的安全作用和混合駕駛舒適性。
轉(zhuǎn)角疊加控制:能夠響應(yīng)智能駕駛控制器要求的角度跟蹤指令,并在EPS內(nèi)部通過(guò)合理的計(jì)算轉(zhuǎn)化為疊加扭矩指令。基于轉(zhuǎn)角疊加控制實(shí)現(xiàn)的LKA功能能夠更好地實(shí)現(xiàn)車(chē)道線(xiàn)跟蹤的效果,進(jìn)一步降低駕駛員的駕駛壓力。作為ADAS功能的接口,轉(zhuǎn)角疊加控制功能同樣需要兼顧ADAS功能的安全作用和混合駕駛舒適性。
自動(dòng)駕駛轉(zhuǎn)角控制:L3+自動(dòng)駕駛場(chǎng)景允許駕駛員的雙手離開(kāi)方向盤(pán),此時(shí)轉(zhuǎn)向系統(tǒng)通過(guò)自動(dòng)駕駛轉(zhuǎn)角控制功能來(lái)精確、快速地響應(yīng)智能駕駛控制器的目標(biāo)轉(zhuǎn)角指令,對(duì)于角度控制的精度要求很高。在此場(chǎng)景下,無(wú)需考慮混合駕駛的場(chǎng)景,但是需要保證駕駛員駕駛與自動(dòng)駕駛狀態(tài)切換過(guò)程的安全性和舒適性。
泊車(chē)轉(zhuǎn)角控制:泊車(chē)轉(zhuǎn)角控制用于智能駕駛的低速泊車(chē)場(chǎng)景,該場(chǎng)景下要求轉(zhuǎn)向系統(tǒng)能夠快速響應(yīng)泊車(chē)控制器的目標(biāo)轉(zhuǎn)角指令。
DSR功能:該功能用于轉(zhuǎn)向與制動(dòng)系統(tǒng)的協(xié)調(diào)控制場(chǎng)景。當(dāng)ESC檢測(cè)到抱死或側(cè)滑即將發(fā)生時(shí),通知EPS施加一個(gè)力幫助駕駛員進(jìn)行轉(zhuǎn)向操作,可以有效的降低剎車(chē)距離、防止或減弱甩尾現(xiàn)象。
方向盤(pán)振動(dòng)提醒:通過(guò)助力電機(jī)的高頻振動(dòng)來(lái)實(shí)現(xiàn)方向盤(pán)振動(dòng)提醒功能,振動(dòng)強(qiáng)度多檔可調(diào),可用于車(chē)道偏離預(yù)警等ADAS功能。

圖3-4 外部請(qǐng)求控制功能
四、小結(jié)
冗余EPS已經(jīng)成為當(dāng)前L3+自動(dòng)駕駛場(chǎng)景下的核心技術(shù)。相比傳統(tǒng)的非冗余EPS,冗余EPS需要更加復(fù)雜的系統(tǒng)架構(gòu)和更加復(fù)雜的功能來(lái)保證車(chē)輛的安全性、可靠性和駕駛體驗(yàn),因此也有更高的技術(shù)壁壘。國(guó)際領(lǐng)先的供應(yīng)商已經(jīng)在該領(lǐng)域積累多年,國(guó)內(nèi)的供應(yīng)商也在積極追趕,相信未來(lái)能夠?yàn)橄M(fèi)者提供更多安全、可靠、舒適的產(chǎn)品。
審核編輯 :李倩
-
冗余
+關(guān)注
關(guān)注
1文章
112瀏覽量
20257 -
EPS
+關(guān)注
關(guān)注
6文章
195瀏覽量
31325 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13904瀏覽量
166741
原文標(biāo)題:L3自動(dòng)駕駛的“雙保險(xiǎn)”:冗余EPS關(guān)鍵技術(shù)解析
文章出處:【微信號(hào):trinova-tech,微信公眾號(hào):英創(chuàng)匯智】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
云計(jì)算HPC軟件關(guān)鍵技術(shù)
雷可達(dá)《安防監(jiān)視雷達(dá)關(guān)鍵技術(shù)的研究與應(yīng)用》通過(guò)科技成果評(píng)價(jià)
先進(jìn)雙向點(diǎn)焊控制器在工業(yè)生產(chǎn)中的關(guān)鍵技術(shù)應(yīng)用與解析
實(shí)驗(yàn)室被動(dòng)式空氣凈化技術(shù)關(guān)鍵技術(shù)解析
經(jīng)緯恒潤(rùn)全冗余R-EPS助力L4級(jí)自動(dòng)駕駛落地

LLM大模型推理加速的關(guān)鍵技術(shù)
機(jī)載低軌衛(wèi)星通信發(fā)展及關(guān)鍵技術(shù)綜述
面向手機(jī)直連的星載相控陣:關(guān)鍵技術(shù)與未來(lái)展望
儲(chǔ)能BMS的關(guān)鍵技術(shù)是什么
車(chē)載電池的類(lèi)型及關(guān)鍵技術(shù)分析
EMI濾波器:工業(yè)應(yīng)用的關(guān)鍵技術(shù)與性能優(yōu)勢(shì)?
冗余電動(dòng)助力轉(zhuǎn)向系統(tǒng)EPS的發(fā)展路徑和關(guān)鍵技術(shù)介紹
多業(yè)務(wù)光端機(jī):實(shí)現(xiàn)高速數(shù)據(jù)傳輸?shù)?b class='flag-5'>關(guān)鍵技術(shù)解析
機(jī)器視覺(jué)缺陷檢測(cè)是工業(yè)自動(dòng)化領(lǐng)域的一項(xiàng)關(guān)鍵技術(shù)

光伏逆變器拓?fù)涓攀黾?b class='flag-5'>關(guān)鍵技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論