 多個技術問題阻礙了 AV 部署
多個技術問題阻礙了 AV 部署
盡管取得了進展,但人們普遍認為自動駕駛汽車技術距離商業化還有幾年的時間。促成這種看法的原因是 AV 行業在過去五年中過度樂觀和表現不佳。在部署起飛之前,許多技術問題仍然必須解決。
我們審查進展并就 AV 開發的當前狀態提出觀點,同時考慮未來部署所需的內容。我們還將介紹許多新興的道路 AV 用例。
已引入 AV 技術安全標準。新興規范對部署時間表至關重要,必須與下一代 AV 系統集成。
自動駕駛汽車的道路使用立法是下一步,這將是成功部署自動駕駛汽車所必需的。隨著新的安全要求的增加,合規性預計將帶來重大挑戰。
下表總結了最明顯類別中的 AV 行業、技術和用例的當前狀態。它涉及三個時間范圍,分為四個部分。
點擊查看完整大小的圖片
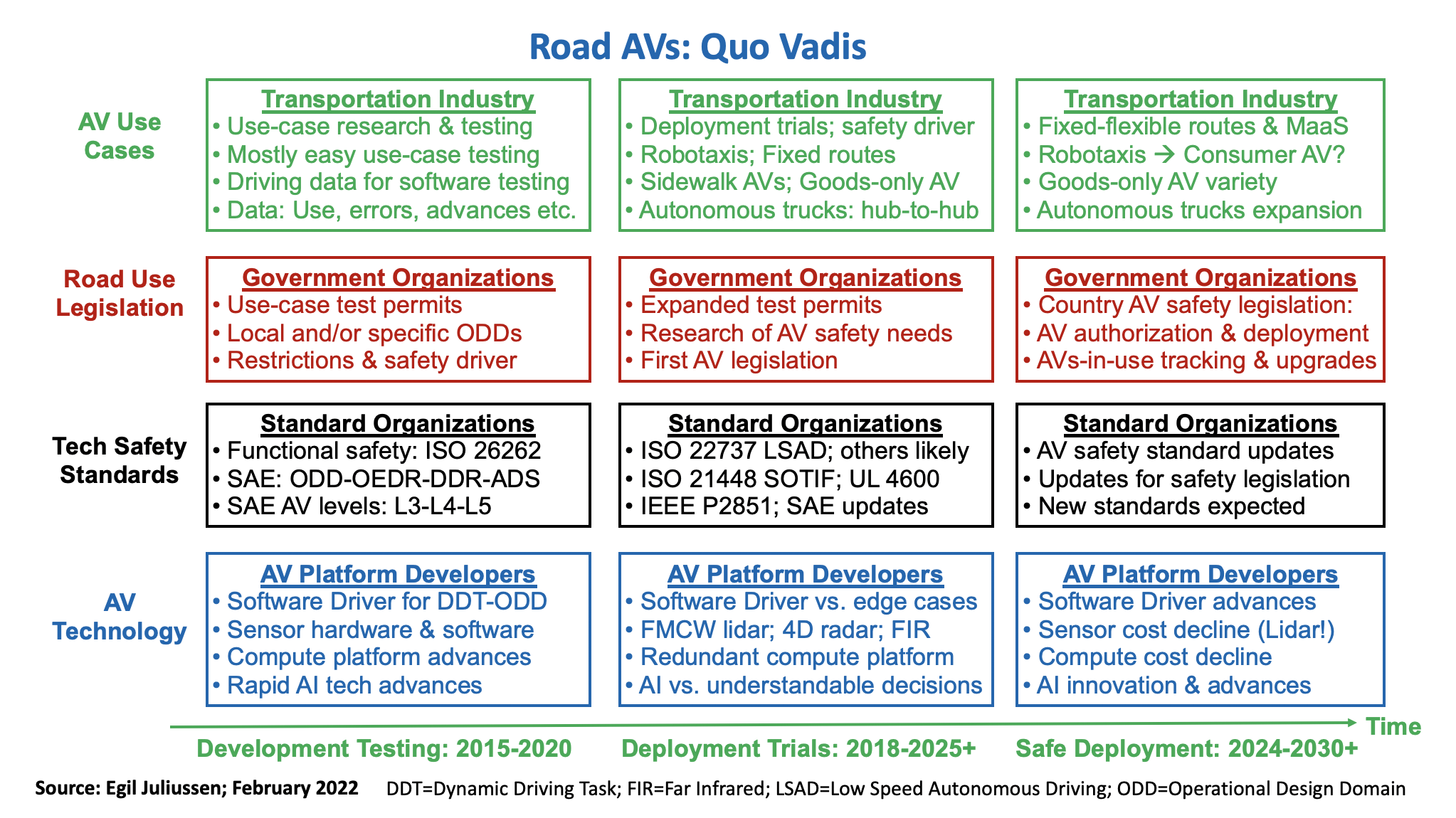
歷史觀點
領先公司的 AV 開發和測試階段從 2015 年延長到 2020 年。有些開始得更早,有些仍在測試中。首先討論 AV 用例,因為它們會極大地影響其他考慮因素。
視音頻用例
最初的研究集中在最有前途的應用上。最初,網約車在中國、美國和其他地區起飛,使機器人出租車成為最理想的早期自動駕駛汽車部署方案。在歐洲,固定路線自動駕駛汽車最受關注,因為大多數城市的叫車服務增長受到限制。美國和中國是自動駕駛卡車開發和測試的主要市場。
了解技術復雜性、客戶需求和其他用例因素需要大量研究。生成用于測試 AV 軟件的訓練數據至關重要。通過模擬進行的虛擬 AV 測試變得越來越重要,并且對于安全性仍然至關重要。
道路使用立法。
到目前為止,政府幾乎沒有監督。大多數情況下都需要測試許可證,所有運送乘客的自動駕駛系統都需要安全駕駛員。僅限貨物的自動駕駛汽車還需要道路許可證,以及在此期間開始測試的自動卡車。
美國一些州頒發了測試許可證,加利福尼亞州是最大的項目。中國在這段時間內開始了機器人測試。歐洲主要測試的是固定路線AVs和一些人行道貨物AVs。
到2019年,超過65家公司已獲得加州DMV許可證,可以測試AVs。共獲得567輛測試車輛的許可證,當年駕駛了近290萬英里。2020年,許可證數量達到668輛測試車輛,但由于大流行,駕駛里程下降到199萬英里。在此期間,AVs需要一名安全駕駛員在加利福尼亞州進行測試。
安全標準。
技術安全主要關注基于ISO 26262及其四個ASIL(汽車安全完整性水平)階段的功能安全。之后介紹的AVs的技術安全標準也已開始工作。
SAE定義了六個駕駛級別,L3、L4、L5代表自動駕駛。這些水平被廣泛使用。SAE還引入了多個重要概念:
對于操作設計領域,ODD定義了AV可以操作的環境。
OEDR或對象和事件檢測與響應,監測并響應駕駛環境。
DDT或動態駕駛任務涵蓋AV駕駛、執行OEDR和避免撞車。
自動駕駛系統是指執行DDT的計算機系統。
AV技術
在此期間,隨著多種新技術的出現,技術發展受到了大量關注。軟件驅動程序是最復雜的組件,因為它需要完成所有DDT功能。傳感器和視覺軟件用于完成OEDR功能。
運行所有軟件的計算機硬件需要比目前更高的性能,這是Nvidia和其他處理器設計師面臨的挑戰。
在這段時間里,人工智能技術發展迅速,也許如此之快,以至于目前人工智能的改進被高估了。
當前狀態
AV目前處于大多數AV用例的部署試驗階段。2018年開始了部分測試階段。對于某些地區的某些用例,該階段可能會持續到2025年或更長時間。
用例。
用例已經演變,其重要性在一定程度上發生了變化。由于卡車司機短缺以及在線訂單和交付量的大幅增加,這種流行病增加了自動駕駛汽車的重要性,因此自動駕駛汽車變得更加理想。
無人駕駛出租車仍然很重要,在美國和中國開始進行無人駕駛試驗,預計未來幾年還會進行更多試驗。加州已批準七家公司進行無人駕駛測試。其中三個已獲得在特定領域部署自動駕駛汽車的授權——Cruise、Nuro 和 Waymo。Nuro 正在測試純商品 AV,而 Cruise 和 Waymo 則專注于機器人出租車。
自動駕駛卡車通過在安全駕駛員的測試模式下交付貨物來產生收入。此用例主要使用集線器到集線器交付方案,其中大部分駕駛都在高速公路上,每次往返都從高速公路到倉庫進行短途旅行。
Sidewalk AV 正在美國、歐洲和中國的一些城市的許多校園和雜貨店提供食物。
道路使用立法。
AV 立法仍然有限,但正在進行大量規劃。法國和德國已經邁出了制定 AV 立法的第一步。其他國家正在通過新的立法,包括中國、英國。在美國
更多國家/地區可獲得更多測試許可。歐洲終于在自動駕駛出租車測試方面變得更加活躍,在慕尼黑、巴黎和其他城市進行了試驗。下面討論的新 ISO 標準將增加固定道路自動駕駛汽車的測試和部署,而歐洲可能處于領先地位。
安全標準。
安全標準在過去一年左右有所提高。ISO 22737 LSAD 對于某些 AV 用例尤其重要。LSAD 或低速自動駕駛將用于許多固定路線的自動駕駛汽車、良好的交付和類似的場景。
ISO 21448 或預期功能安全性將功能安全性擴展到 AV。該規范涵蓋了在沒有系統故障的情況下發生的功能安全漏洞。(ISO 26262 涵蓋系統故障。)
UL 4600 涉及 L4-L5 自動駕駛汽車,包括自動駕駛開發的所有方面。UL 4600 由 Underwriters Laboratories 和 Edge Case Research 開發。它將 ISO 26262 和 21448 擴展到 AV,基于其當前狀態并在沒有人工干預的情況下感知其操作環境。
IEEE P2851 正在利用 Mobileye 的 AV 駕駛算法來避免碰撞——責任敏感安全 (RSS) 模型。RSS 是一個正式的數學模型,它采用技術中立的方法來避免崩潰。該標準稱為與安全相關的自動車輛行為模型的假設。
定義 AV 級別和概念的 SAE J3016 術語標準正吸引越來越多的批評,當它僅定義 AV 術語時被視為安全標準。我們的同事 Colin Barnden 對此和其他 AV 安全主題進行了出色的概述。
SAE 很可能會將其六個級別從 ADAS 更新為 AV。卡內基梅隆大學的 Phil Koopman 提出的一項基于 Koopman 的四種簡化自動化模式的建議獲得了相當大的支持:
駕駛員輔助:支持人類駕駛員。
監督自動化:人類駕駛員監控并填補能力空白。
自主操作:沒有人類駕駛員對安全負責。
車輛測試:由于潛在的設計缺陷,駕駛員可以降低風險。
視音頻技術
AV 技術不斷進步——某些方面比其他方面更重要。軟件驅動程序正在改進,其中一些涵蓋了多個 AV 用例。以前從未見過的邊緣情況或新的駕駛情況仍然是一個棘手的問題,需要相當大的進步才能獲得可接受的安全性。
傳感器隨著改進技術的出現而不斷發展。飛行時間 (ToF) 和調頻連續波 (FMCW) 技術之間的激光雷達技術之爭正在進行中。ToF 是大多數 AV 初創公司使用的成熟技術。FMCW 具有諸如最小干擾、出色的速度測量和更長的范圍等關鍵優勢。然而,成本仍然是一個問題。FMCW 看起來是長期贏家。
新一代雷達技術正在興起,它將通過 4D 或成像雷達大大提高傳感能力。4D雷達帶來了與激光雷達的重疊功能,是雷達的長期領導者。
在其他地方,遠紅外線 (FIR) 是另一種有前途的 AV 傳感器技術。FIR 可以比其他傳感器更好地檢測溫暖的物體,對于檢測行人和動物至關重要。
人工智能技術不斷改進,但進步的速度似乎已經放緩——至少對于自動駕駛汽車來說是這樣。一個問題是所謂的黑盒問題:仍然很難確定 AI 模型如何為 AV 駕駛做出決策。這種模糊性仍然是 AV 使用的一個大問題。需要更好的解決方案。
未來展望
安全部署階段將因 AV 用例而異,時間范圍為 2024 年至 2030 年,甚至可能更晚——具體取決于領先企業的計劃。下一節回顧上面的圖表。
視音頻用例。
交通模式相對簡單的用例(包括低速旅行)將首先看到安全部署。這包括在許多公共交通部署中用于固定和可變路線的 AV。僅貨物交付 AV 也將看到早期部署,將人行道 AV 作為以步行速度運行的最簡單版本。
Nuro 等基于道路的純貨物自動駕駛汽車也應該看到早期部署。Nuro 的第三代 AV 包括一個外部安全氣囊,以提高行人的安全性。
機器人出租車正在部署中,但僅限于部分城市的受限區域。擴張將取決于道路使用立法。未來機器人出租車的運營安全性也將對未來的擴張產生重大影響。一些致命的撞車事故可能會迅速滾雪球,成為所有自動駕駛出租車操作員面臨的重大問題——即使只有少數撞車事故導致受傷或死亡。
消費級自動駕駛汽車將利用機器人出租車的開發和部署,但至少會滯后五年。消費類 AV 的 ODD 可能有限,其模式類似于自動駕駛出租車。決定消費者 AV 部署的最大因素將是未來的道路使用立法。
一些自動駕駛卡車應用程序將在 2025 年之前部署,其中集線器到集線器將處于領先地位。自動駕駛卡車承諾即使在有安全駕駛員的情況下也能改善操作,特別是考慮到當前的駕駛員短缺和更好地利用法定休息時間之間的駕駛員時間。司機的效率可以縮短新鮮農產品等商品的行程時間,具有顯著的成本優勢。
道路立法。
到 2025 年,許多國家可能會出臺重要的道路使用立法。這些法律將對所有 AV 用例產生深遠影響,可能會延遲 AV 部署。
作為這些審議的一部分,必須做出幾個艱難的決定,因為新的 AV 立法將基于制定具體規定的最少數據。其中包括指定 AV 安全與人工駕駛車輛相比的起點,以及如何衡量這種關系的演變。自動駕駛汽車通過提高安全性的軟件更新得到改進。針對一組特定的人類駕駛員衡量安全改進仍然是一個懸而未決的問題
英國通過 AV 立法的努力對辯論做出了很大貢獻。例如,英國研究人員得出結論,AV 安全是一項最好留給議會的政治決定。
到目前為止,很少有人討論未來 AV 市場對公司和政府的巨大收入潛力。毫無疑問,這種收入潛力將被納入 AV 道路使用立法。隨著 AV 部署的推進,早期的 AV 部署還將賦予其他國家可以利用的技術和使用領先地位。
安全標準。
AV 技術標準狀況良好:ISO 21448 和 UL 4600 已獲得批準,IEEE P2851 即將推出。這些標準必須內置到下一代 AV 系統中,以增加相當大的安全性。
新技術標準或至少現有標準的更新是可能的。一個問題是,是否會有針對自動駕駛卡車、純貨物 AV 或其他車輛類別的特定技術標準?
未來的立法可能還需要在 2025 年的時間范圍內制定新的或更新的標準。這可能對未來的 AV 技術標準產生最大的影響。
視音頻技術。
需要持續改進 AV 技術。軟件驅動程序將依賴于人工智能技術的進步和來自擴展機器學習的改進以及來自測試和操作的數據。
FMCW激光雷達、4D雷達和FIR等傳感器硬件和軟件技術正在進入量產階段。所有傳感器都將看到成本下降和可靠性提高,激光雷達變得更加實惠。
隨著成本的下降,計算性能也會提高。帶有人工智能加速器的芯片將有助于提高重要性。一些 AV 公司將開發自己的芯片。
底線
AV 必須在批量部署之前克服多重挑戰。技術復雜性仍然令人生畏:開發和證明軟件驅動程序可以勝過人類驅動程序仍然是一個主要障礙。
AV 用例變得越來越清晰,其中一些比其他用例更容易掌握。具有簡單流量模式和低速度的部署將看到早期的批量部署。
AV 技術標準正在進步。現在取決于 AV 公司將這些標準快速集成到他們的平臺中。
也許最艱難和最有爭議的決定將由制定自動駕駛道路使用立法的政客做出。他們必須權衡自動駕駛汽車的安全性和人類駕駛員的能力。他們還必須具體說明新法律的實施、自動駕駛汽車將如何被授權供公眾使用以及自動駕駛汽車在其駕駛生命周期內如何保持授權。
審核編輯 黃昊宇
-
AV
+關注
關注
2文章
268瀏覽量
44514 -
自動駕駛
+關注
關注
784文章
13826瀏覽量
166502
發布評論請先 登錄
相關推薦
企業AI模型部署攻略

云終端——醫院快速部署終端最優解

鴻蒙實戰開發-本地部署、SmartPerf 編譯部署指導文檔
NVIDIA推出OVX存儲驗證計劃,加速AI部署
SDI轉AV轉換器:實現高清視頻信號轉換的新選擇
SDI轉AV轉換器技術解析:轉換過程中的關鍵要素與優勢
SDI轉AV轉換器在影視制作中的應用及其實踐
SDI轉AV轉換器:實現高清與標清的無縫對接
MBD工具鏈的云部署
Vulkan 1.3.277新增AV1 Decode擴展,提升視頻解碼質量
德賽西威的毫米波雷達技術產品線

使用Jenkins和單個模板部署多個Kubernetes組件






 工商網監
工商網監
評論