 用TFMini LiDAR傳感器和Arduino實現激光測距
用TFMini LiDAR傳感器和Arduino實現激光測距
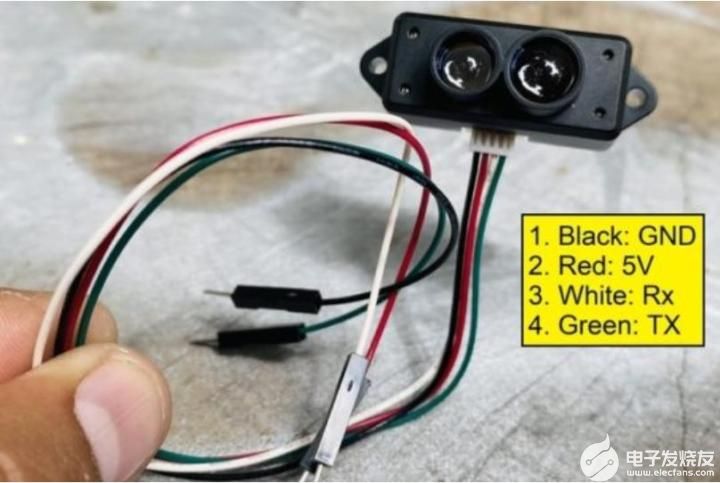
LiDAR測距應用越來越普及,例如行人檢測、車輛檢測、障礙物探測等自動駕駛應用,以及道閘防砸、高度計等。本項目以北醒TFMini-S Micro LiDAR傳感器為例,演示LiDAR傳感器與Arduino的連接,以及測距結果及顯示。本項目BOM如下:
Arduino Nano開發板 1
TFMini-S LiDAR傳感器 1
JHD162A 16X2 LCD顯示器 1
10K電位器 1
面包板 1
跳線 22
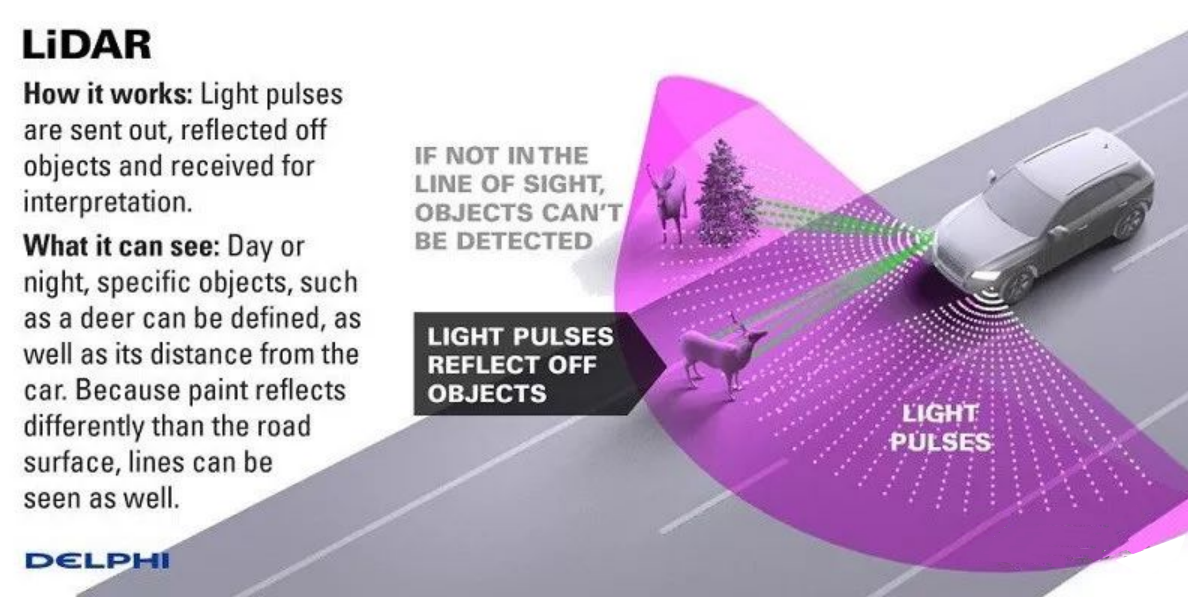
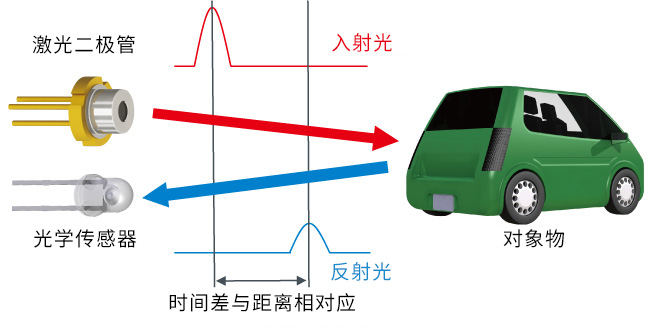
基于激光的精確測距能力,LiDAR是一種精確的激光探測及測距器件。LiDAR工作原理與無線電雷達沒有區別,即由雷達發射系統發送一個信號,經目標反射后被接收系統收集,通過測量反射光的運行時間而確定目標的距離。至于目標的徑向速度,可以由反射光的多普勒頻移來確定,也可以測量兩個或多個距離,并計算其變化率而求得速度。
?
項目采用的TFmini-S是一款基于TFmini升級的單點測距雷達,盲區降低為10cm,室外測距性能進一步提升,不同反射率的測距精度得到優化,可以實現穩定、精準、高靈敏和高速的距離測量。
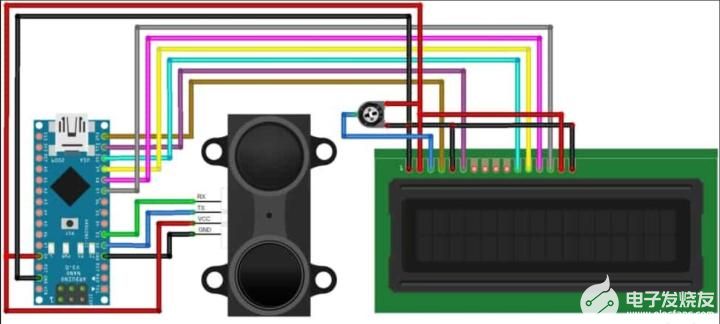
連接TFMini-S LiDAR傳感器與Arduino
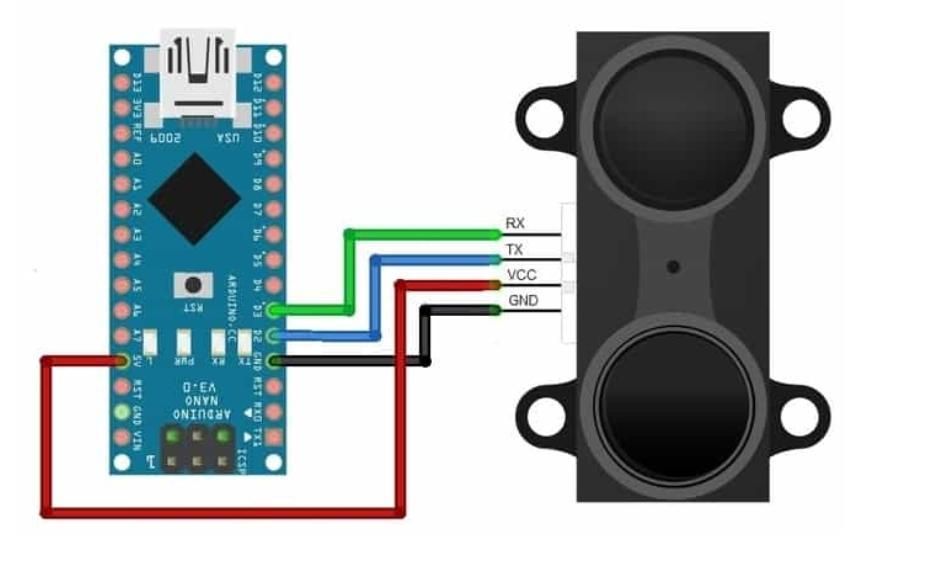
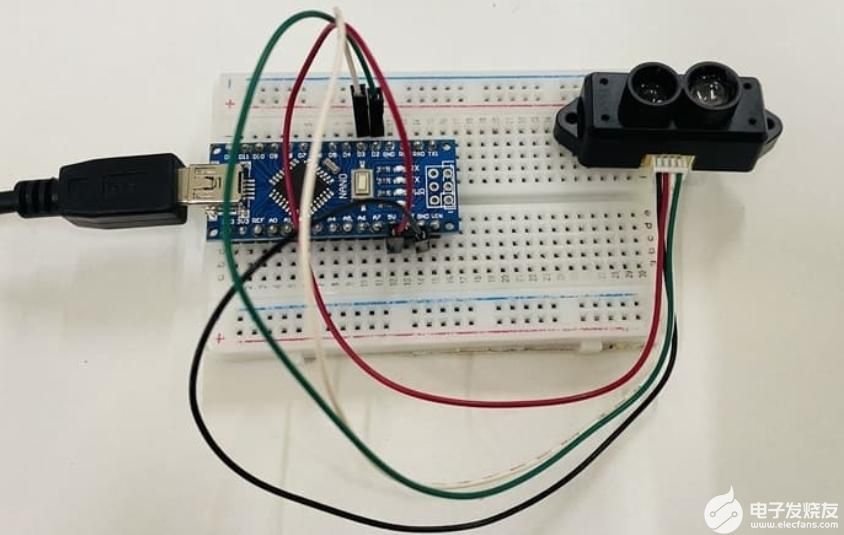
TFMini-S LiDAR可通過UART或I2C接口與Arduino連接。本項目采用UART。
?
將TFMini傳感器的VCC & GND引腳連接到Arduino開發板的5V & GND引腳,Tx、RX引腳連接到Arduino開發板的D2 & D3引腳。
當然,也可以把Tx and Rx連接在其他引腳上,只要支持軟件串口即可。
源代碼及例程庫
北醒官網、Github都提供有TFMini-S LiDAR傳感器庫文件和例程,具體如下:
include
#include "TFMini.h"
TFMini tfmini;
SoftwareSerial SerialTFMini(2, 3); //The only value that matters here is the first one, 2, Rx
void getTFminiData(int* distance, int* strength)
{
static char i = 0;
char j = 0;
int checksum = 0;
static int rx[9];
if (SerialTFMini.available())
{
rx[i] = SerialTFMini.read();
if (rx[0] != 0x59)
{
i = 0;
}
else if (i == 1 && rx[1] != 0x59)
{
i = 0;
}
else if (i == 8)
{
for (j = 0; j < 8; j++)
{
checksum += rx[j];
}
if (rx[8] == (checksum % 256))
{
*distance = rx[2] + rx[3] * 256;
*strength = rx[4] + rx[5] * 256;
}
i = 0;
}
else
{
i++;
}
}
}
void setup()
{
Serial.begin(115200); //Initialize hardware serial port (serial debug port)
while (!Serial); // wait for serial port to connect. Needed for native USB port only
Serial.println ("Initializing...");
SerialTFMini.begin(TFMINI_BAUDRATE); //Initialize the data rate for the SoftwareSerial port
tfmini.begin(&SerialTFMini); //Initialize the TF Mini sensor
}
void loop()
{
int distance = 0;
int strength = 0;
getTFminiData(&distance, &strength);
while (!distance)
{
getTFminiData(&distance, &strength);
if (distance)
{
Serial.print(distance);
Serial.print("cm\t");
Serial.print("strength: ");
Serial.println(strength);
}
}
delay(100);
}
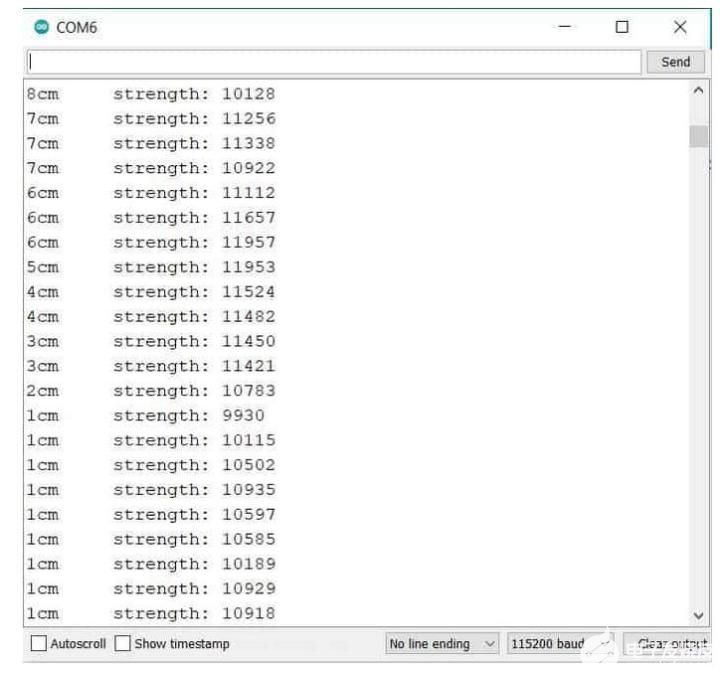
這下,Serial monitor開始顯示距離和信號強度,把手在傳感器前面來回移動可觀察到距離在變化,盲區從30cm縮減到10cm。
?
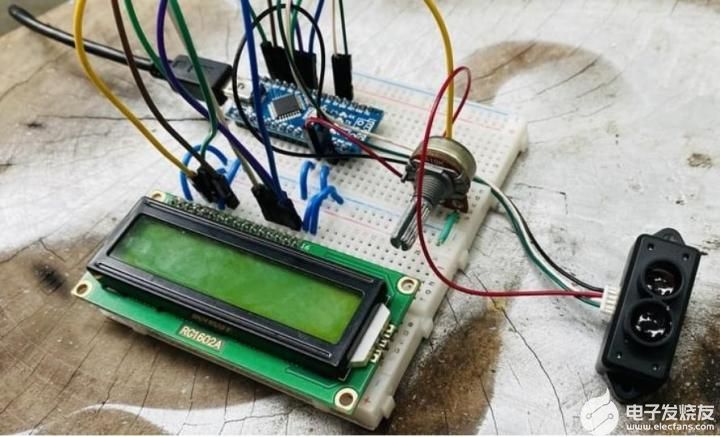
如果希望通過LCD顯示測量結果,就需要在前述電路的面包板上加一個16x2 LCD顯示器,并通過10K電位器來調節LCD的對比度。這樣,本項目就實現了便攜式涉及,可以裝起來帶去戶外體驗了。
#include
LiquidCrystal lcd(12, 11, 10, 9, 8, 7);
#include
#include "TFMini.h"
TFMini tfmini;
SoftwareSerial SerialTFMini(2, 3); //The only value that matters here is the first one, 2, Rx
void getTFminiData(int* distance, int* strength)
{
static char i = 0;
char j = 0;
int checksum = 0;
static int rx[9];
if (SerialTFMini.available())
{
rx[i] = SerialTFMini.read();
if (rx[0] != 0x59)
{
i = 0;
}
else if (i == 1 && rx[1] != 0x59)
{
i = 0;
}
else if (i == 8)
{
for (j = 0; j < 8; j++)
{
checksum += rx[j];
}
if (rx[8] == (checksum % 256))
{
*distance = rx[2] + rx[3] * 256;
*strength = rx[4] + rx[5] * 256;
}
i = 0;
}
else
{
i++;
}
}
}
void setup()
{
lcd.begin(16, 2);
Serial.begin(115200); //Initialize hardware serial port (serial debug port)
while (!Serial); // wait for serial port to connect. Needed for native USB port only
Serial.println ("Initializing...");
SerialTFMini.begin(TFMINI_BAUDRATE); //Initialize the data rate for the SoftwareSerial port
tfmini.begin(&SerialTFMini); //Initialize the TF Mini sensor
}
void loop()
{
int distance = 0;
int strength = 0;
getTFminiData(&distance, &strength);
while (!distance)
{
getTFminiData(&distance, &strength);
if (distance)
{
Serial.print(distance);
Serial.print("cm\t");
Serial.print("strength: ");
Serial.println(strength);
lcd.setCursor(0, 0);
lcd.print("Dis: ");
lcd.print(distance);
lcd.print(" cm");
lcd.setCursor(0, 1);
lcd.print("Str: ");
lcd.print(strength);
}
}
delay(500);
lcd.clear();
}
結果顯示,TFMini-S LiDAR傳感器最大測距為12m,由于戶外障礙物比室內少很多,測距準確度高達90%。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753570 -
激光測距
+關注
關注
9文章
159瀏覽量
27559 -
Arduino
+關注
關注
188文章
6469瀏覽量
187069 -
LIDAR
+關注
關注
10文章
326瀏覽量
29423
發布評論請先 登錄
相關推薦
baumer激光測距傳感器獨特應用
【北醒TFmini-S 測距/避障激光雷達傳感器免費試用連載】基于北醒TFmini-S 測距/避障激光雷達傳感器關鍵地區人員靠近防撞提醒裝置
【北醒TFmini-S 測距/避障激光雷達傳感器免費試用連載】傳送帶貨物監測
【北醒TFmini-S 測距/避障激光雷達傳感器免費試用連載】基于FPGA平臺的YOLO-Complex點云數據加速
【北醒TFmini-S 測距/避障激光雷達傳感器試用連載】——上位機測試
LiDAR激光雷達技術原理及Arduino示例代碼糾錯
如何選擇激光測距傳感器?






 工商網監
工商網監
評論