 LiDAR激光雷達技術原理及Arduino示例代碼糾錯
LiDAR激光雷達技術原理及Arduino示例代碼糾錯
激光雷達(Light Detection and Ranging,LiDAR)即激光探測和測距,又稱光學雷達,是自動駕駛領域的一種基礎感測技術。LIDAR是激光科技與雷達技術的組合,以下以無人機和自動駕駛領域常用的LIDAR-Lite系列為例,介紹LIDAR與Arduino開發板的連接幾測距示例。
LiDAR工作原理
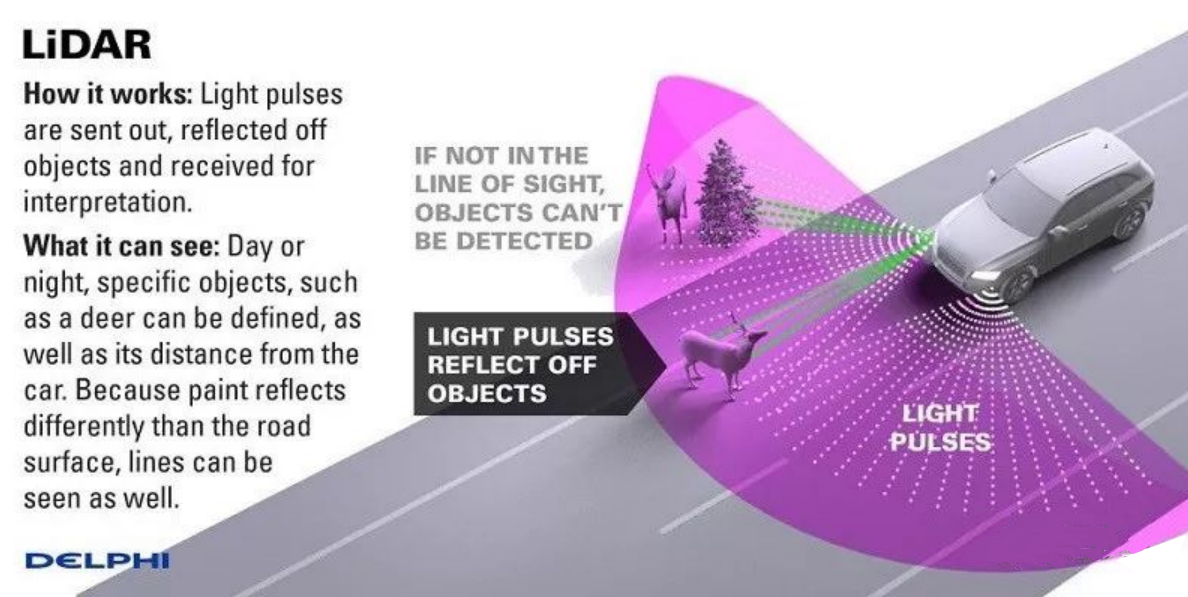
LiDAR工作原理與通信雷達一樣,都是飛行時間測量法(Time of Flight,TOF),只是發射介質采用的是對人畜無害的紅外光束(Light Pluses),而不是無線電波。
 激光雷達LiDAR示意圖
激光雷達LiDAR示意圖
LiDAR通過發射、反射和接收紅外光束來探測白天或黑夜下的特定物體及動態數據,甚至由于反射度的不同,車道線和路面也是可以區分開來的。對于車用激光雷達,光速是每秒30萬公里,要區分目標厘米級別的精確距離,對傳輸時間測量分辨率必須做到1納秒。要如此精確的測量時間,對應的測量系統的成本就很難降低,還需要使用巧妙的方法降低測量難度。
 激光雷達LiDAR系統組成
激光雷達LiDAR系統組成
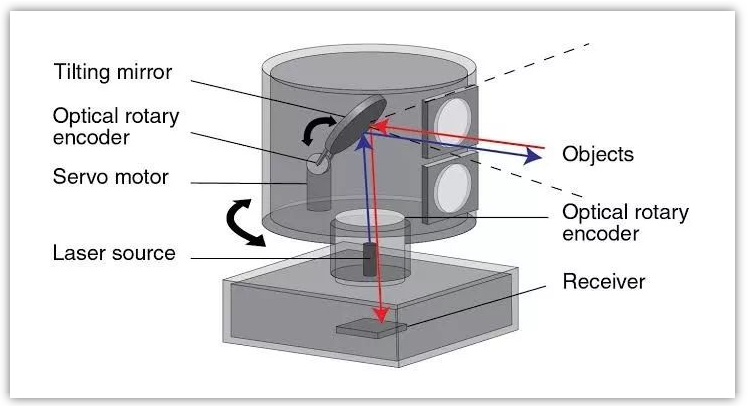
LiDAR系統一般包括激光發射光源、接收器、伺服電機、斜面鏡和光學旋轉編碼器(又稱圓光柵)幾部分。通過旋轉的機械鏡面測量激光發出和收到回波的時間差,LiDAR可確定目標的方位和距離。由于激光雷達主動發射激光,因此受環境光變化的影響小,測距精確。
LiDAR與Arduino連接
LIDAR是激光科技與雷達技術的組合,不但應用前景廣闊,使用也非常簡便。通過Arduino開發板就能實現測距應用,必要的物料BOM表如下:
USB micro-B電纜 USB 2.0 A-B型 x1
電阻器 1/4W 500歐姆 x1
SparkFun Arduino開發板 DEV-15123 x1
LIDAR-Lite v3傳感器 Garmin SEN-14032 x1
電容器 1000uF/25V去耦鋁電解電容器 x1
面包板 x1
跳線 若干
 LIDAR-Lite激光雷達
LIDAR-Lite激光雷達
其中,LIDAR-Lite前方有兩個鏡筒,里面分別是激光發射器和接收器,用以發現和檢測目標。側面的電氣接口用來連接6-wire電纜。底部的4個安裝孔用來固定傳感器,螺絲規格為 #6 or M3.5。
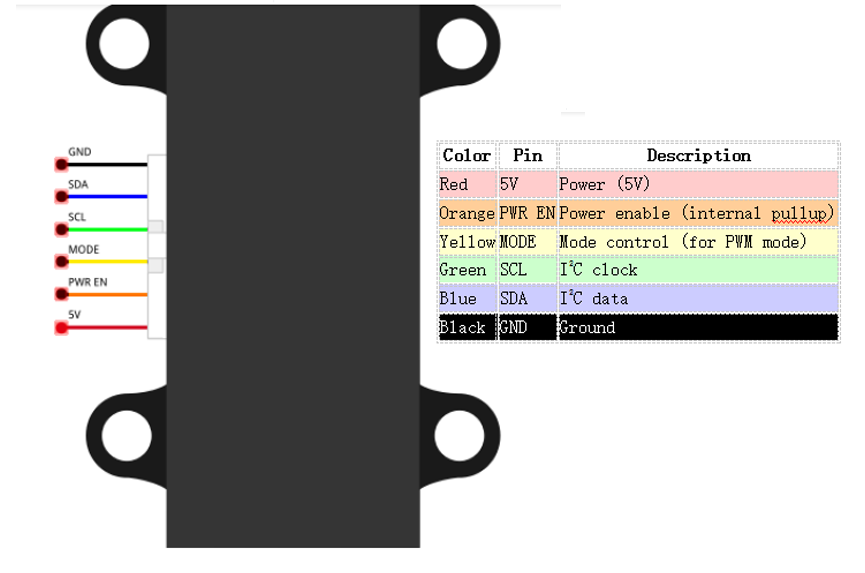
LIDAR-Lite有6個引線,用來與控制板通信。其功能分別為:
紅色:5V,連接5V電源。
橙色:PWR EN,電源使能(內部上拉)
黃色:MODE,模式控制(用于PWM模式)
綠色:SCL,I2C時鐘
藍色:SDA,I2C數據
黑色:GND,接地線
 LIDAR-Lite的引線及功能說明
LIDAR-Lite的引線及功能說明
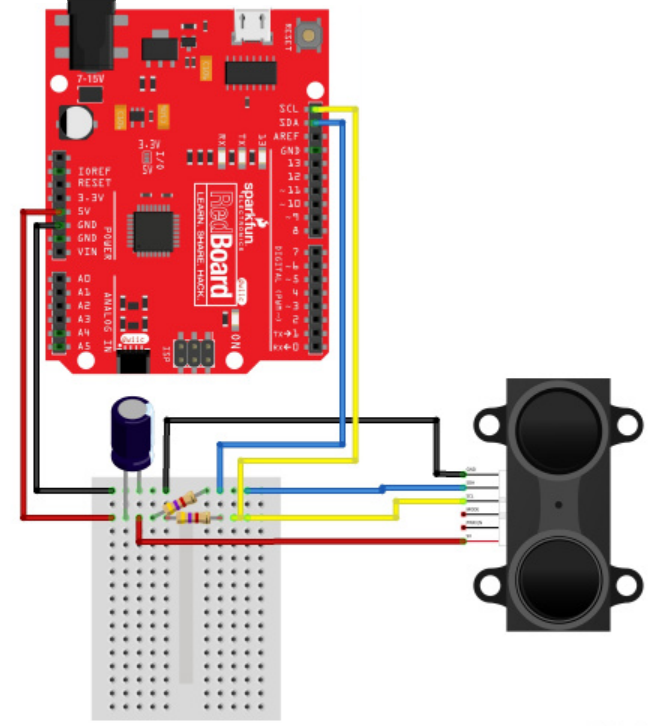
由于LIDAR-Lite工作于4.5V to 5.5V,消耗的連續電流高達135mA (待機狀態為105mA),為了維持穩定工作,需要在5V電源和GND之間連接一個680μF電容器,并盡量靠近LIDAR傳感器單元。
用于SCL和SD線路的I2C總線上拉電阻器一般為4.7kΩ,如果鏈路較長或系統器件較多,可改用較小阻值的電阻元件。當線路長度超過允許長度時,可采用總線擴展器。
 LIDAR傳感器與Arduino開發板連接
LIDAR傳感器與Arduino開發板連接
按照電路圖將LIDAR傳感器與RedBoard或者其他Arduino兼容開發板連接,IDAR-Lite就可以通過I2C總線來測量距離了。
LiDAR庫文件及代碼
連接好電路圖后,用USB電纜將LiDAR連接到PC,就可以安裝專門的Arduino庫文件了。這很簡單,打開Arduino Library Manager按照提示操作就OK了。如果這些庫文件沒有鏈接到Arduino IDE,就需要手動操作,過程也不復雜。
庫文件裝好后,打一個新的Arduino sketch,拷入如下代碼:
/**
* LIDARLite I2C Example
* Author: Garmin
* Modified by: Shawn Hymel (SparkFun Electronics)
* Date: June 29, 2017
*
* Read distance from LIDAR-Lite v3 over I2C
*
* See the Operation Manual for wiring diagrams and more information:
* http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf
*/
#include #include
// Globals
LIDARLite lidarLite;int cal_cnt = 0;
void setup()
{
Serial.begin(9600); // Initialize serial connection to display distance readings
lidarLite.begin(0, true); // Set configuration to default and I2C to 400 kHz
lidarLite.configure(0); // Change this number to try out alternate configurations
}
void loop()
{
int dist;
// At the beginning of every 100 readings,
// take a measurement with receiver bias correction
if ( cal_cnt == 0 ) {
dist = lidarLite.distance(); // With bias correction
} else {
dist = lidarLite.distance(false); // Without bias correction
}
// Increment reading counter
cal_cnt++;
cal_cnt = cal_cnt % 100;
// Display distance
Serial.print(dist);
Serial.println(" cm");
delay(10);
}
代碼上傳成功后,打開Serial Monitor,就可以看到如下顯示的測量結果。
 LIDAR傳感器的測距結果
LIDAR傳感器的測距結果
如果Serial Monitor顯示有誤(nack error),大部分情況是I2C總線連接問題,因為I2C總線對接觸不良非常敏感,最好是事先在面包板上焊接幾根導線出來。當然,也可能是上拉電阻太大了,可換個小一點阻值的試試,直到正常測量為止。
-
激光雷達
+關注
關注
968文章
3972瀏覽量
189923 -
Arduino
+關注
關注
188文章
6469瀏覽量
187069 -
LIDAR
+關注
關注
10文章
326瀏覽量
29423
發布評論請先 登錄
相關推薦
激光雷達分類以及應用
常見激光雷達種類
消費級激光雷達的起航
固態設計激光雷達
最佳防護——激光雷達與安防監控解決方案
激光雷達知多少:從技術上講講未來前景
由iphone12說說激光雷達 FMCW激光雷達 精選資料分享
激光雷達LIDAR的工作原理及特點應用分析
激光雷達是什么,激光雷達的應用說明
Mobility LiDAR系列激光雷達突破固態激光雷達的局限
激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論