

在自動駕駛環境感知系統中,如何獲取高精度實時路況數據,是決定自動駕駛系統行車安全的關鍵。
目前主流的兩種感知技術路徑“純視覺”與“高精地圖+激光雷達”中,由于激光雷達采集的3D點云路況數據更為密集、準確且具備三維地理信息,因此以3D點云數據為基礎的感知算法即成為部分自動駕駛企業的核心技術路徑,并誕生了規模龐大的3D點云數據標注需求。
何為3D點云語義分割
對3D點云數據的標注處理,依據處理方式和使用標注工具的不同,大致可以分為三類:
▌純點云
純點云使用的標注工具以3D立體框為主,待標注對象以3D立體框形式標出,并附上相對應的屬性信息標簽,具體形式如下:
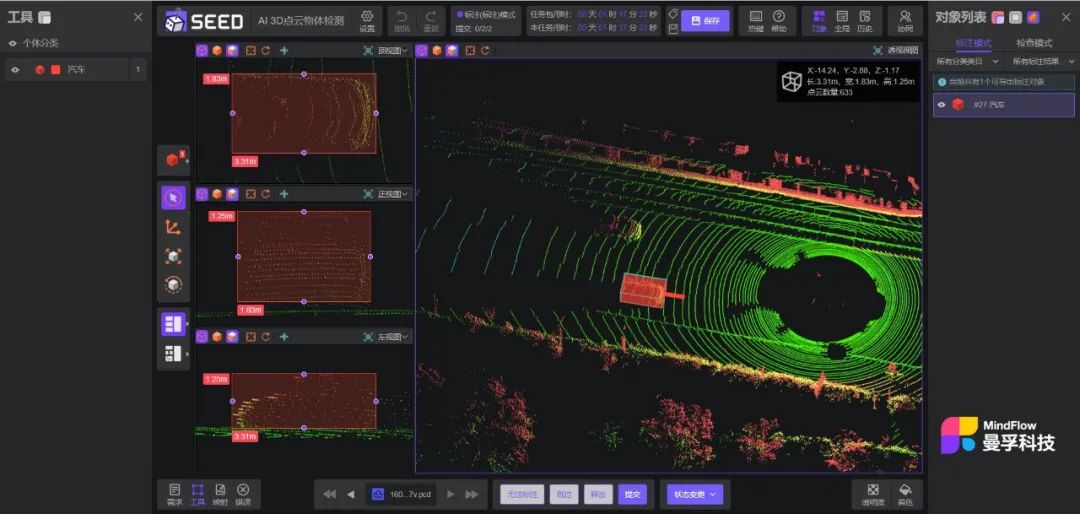
圖片來源:曼孚科技SEED數據服務平臺
▌融合標注
融合標注使用的3D標注工具仍以3D立體框為主,但在3D點云數據以外,還需要使用2D標注工具在點云數據相對應的2D圖像中進行標注,3D點云數據中的標注對象與2D圖像中的標注對象一一對應,具體形式如下:
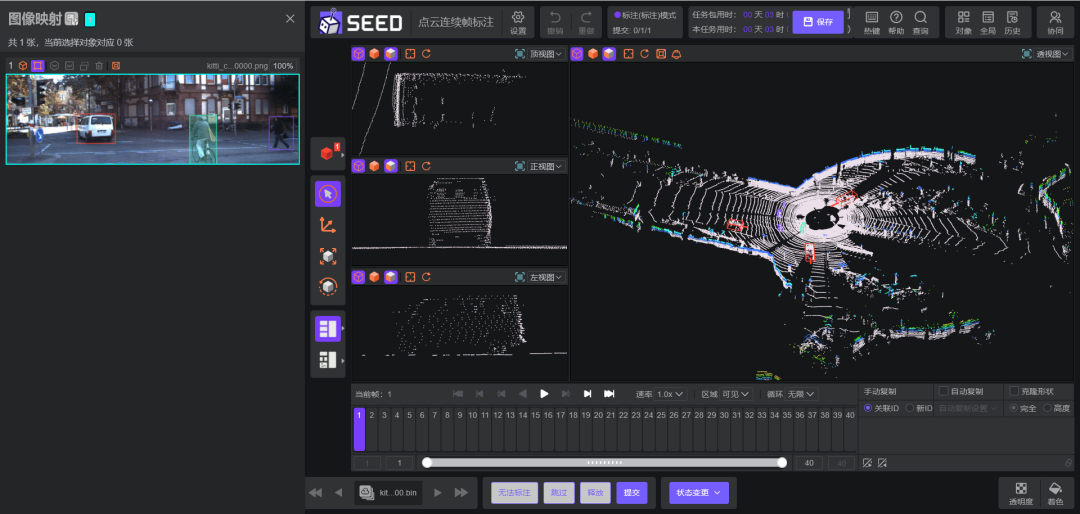
圖片來源:曼孚科技SEED數據服務平臺
▌3D點云語義分割
與2D圖像語義分割標注邏輯類似,3D點云語義分割也是對不同的待標注對象進行上色分割、賦予語義標簽,不同的是3D點云語義分割需要在3維立體點云中對每個像素點指定一個類別標簽,比如車輛、行人、道路、建筑物等,具體形式如下:
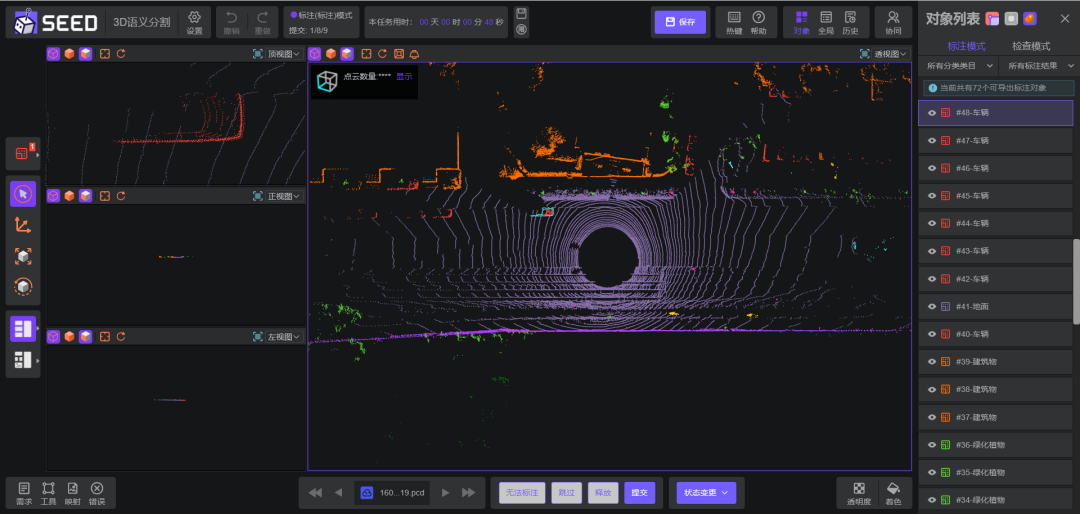
圖片來源:曼孚科技SEED數據服務平臺
相較于前兩種標注方式,在需要更為精細的空間信息時(比如自動泊車),立體框標注場景中如鉸接式公交車等形狀可變的物體,3D點云語義分割標注對路況數據的反饋更為精準,因此3D點云語義分割標注在自動駕駛感知算法中所占的比重也愈發高漲。
常見標注規則與標注對象
不同算法、不同應用場景對點云語義分割的標注需求與規則也不盡相同,常見的相對簡單的自動駕駛3D點云語義分割標注對象包括:
1、行人:通常指未騎乘交通工具的人,包含騎滑板車、平衡車的人。
2、騎車人:通常包括騎摩托車、自行車、三輪車、電動車等的人。
3、車輛:車輛是3D點云語義分割標注場景下最為常見,且子分類較多的對象。子對象的劃分有依據車輛具體車型,比如轎車、卡車、公交車、救護車等,也有依據類別,比如客車、貨車、工程車等。
以類別為例,具體如下:
1)微型車:如代步車、各類三輪車等;
2)小型汽車:如轎車、SUV等;
3)客車:如大、中型巴士、雙層巴士等載人車輛;
4)貨車:如廂式貨車等載貨車輛;
5)工程車:灑水車、消防車、垃圾車等;
6)其他車輛。
4、路面相關:與路面相關的各種對象,可具體細分為馬路可行駛區域、人行道、車道線等。
5、建筑物:如樓房、隧道橋面、橋墩、高架橋等。
6、植物:如草地、樹木等。
7、路面物體:路面物體也是一個子對象較多的種類,常見的包括:
1)護欄:如交通隔離欄、交通護欄等;
2)柵欄:臨時性的如交通水馬等;
3)交通標志:如紅綠燈、標識牌、桿等;
4)障礙物:如交通錐桶、警示牌、防撞桶、石墩等;
5)其他物體。
8、噪聲點云:如水霧、煙霧、汽車尾氣、雨水等各類噪聲點云。
以上是3D點云語義分割常見的各類標注對象,但不同場景,具體的對象劃分規則以及待標注對象種類都存在巨大差異,并沒有統一的標準。
而在更為具體的標注規則上,差異同樣十分巨大。
常見的標注規則如物體起標范圍,通常會規定點云數量超過X以上,該物體即需要標注,此外還會規定模糊無法判定物體的具體標注規則等等,不一而足。
具象化的標注實例如下:
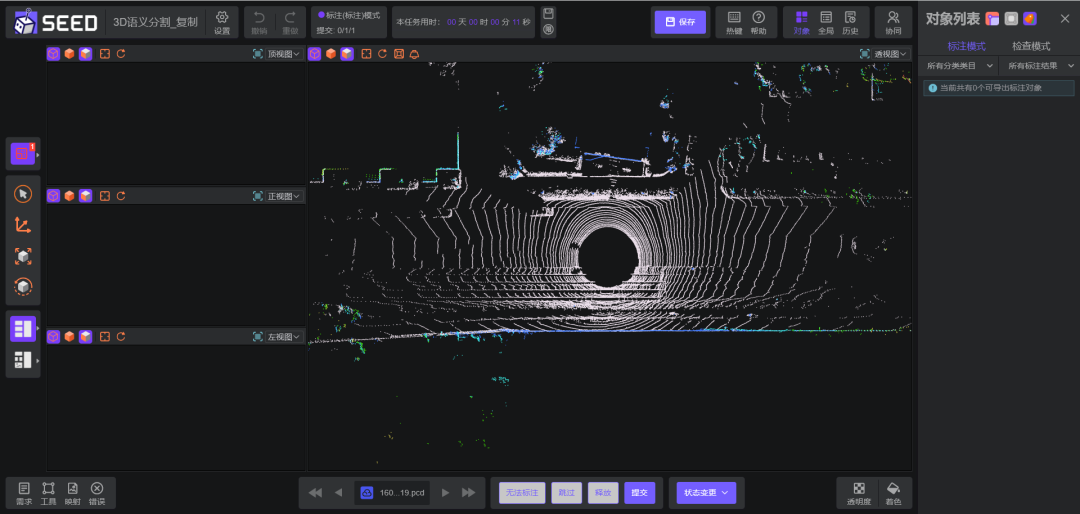
標注前(圖片來源:曼孚科技SEED數據服務平臺)
標注后(圖片來源:曼孚科技SEED數據服務平臺)
隨著自動駕駛商業量產進入新階段,開放路段場景復雜且多變,需要自動駕駛算法有更深的場景積累度與迭代能力,以滿足感知算法與行車安全的需求。
3D點云語義分割更精細的場景信息反饋,在幫助算法建立更貼合現實的場景模型,以及提升感知安全方面具備天然優勢,在自動駕駛邁向大規模商業化應用的今天,勢必將扮演更重要的角色。
審核編輯 :李倩
-
3D
+關注
關注
9文章
2940瀏覽量
109121 -
激光雷達
+關注
關注
970文章
4147瀏覽量
191548 -
自動駕駛
+關注
關注
788文章
14121瀏覽量
168777
原文標題:案例分享:自動駕駛3D點云語義分割數據標注
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種以圖像為中心的3D感知模型BIP3D

對于結構光測量、3D視覺的應用,使用100%offset的lightcrafter是否能用于點云生成的應用?
SciChart 3D for WPF圖表庫
騰訊混元3D AI創作引擎正式上線
3D掃描技術醫療領域創新實踐,積木易搭3D掃描儀Mole助力定制個性化手臂康復輔具
語義分割25種損失函數綜述和展望

圖像語義分割的實用性是什么
圖像分割和語義分割的區別與聯系
裸眼3D筆記本電腦——先進的光場裸眼3D技術
圖像分割與語義分割中的CNN模型綜述
友思特案例 | 自研創新!三維工件尺寸測量及點云處理解決方案

3D建模的特點和優勢都有哪些?
機器人3D視覺引導系統框架介紹






 工商網監
工商網監

評論