 通過改善能源管理的軟件包Commander來優化機器人及無人機的能源供應
通過改善能源管理的軟件包Commander來優化機器人及無人機的能源供應
無線電源解決方案開發商 WiBotic 宣布推出 Commander,這是一個旨在改善能源管理的軟件包——使用該公司的充電技術——特別適用于包括無人機在內的大型機器人艦隊。此外,其軟件包提供了一個API來控制電池參數。
WiBotic的首席執行官兼聯合創始人 Ben Waters在接受EEWeb采訪時指出,機器人的采用正在增長,各種組織對充電系統的投資也在增長。他解釋說,最大的挑戰之一是將系統設計為簡單靈活,同時還具有可擴展性和高度安全性。
“WiBotic Commander 的目標是為機器人操作員提供軟件工具,以更好地了解并優化向異構機器人車隊供電的過程,”Waters 說。“該軟件將提供報告,顯示機器人艦隊在何處、何時以及使用多少能量,無論機器人或電池的類型如何。這將允許操作員實際移動充電站、更改充電時間表或更改充電參數(例如提供給電池的最大電壓和電流),以提高他們的機器人的生產力——減少機器人的數量和成本——并使這些機器人的電池壽命更長。”
Commander API(來源:WiBotic)
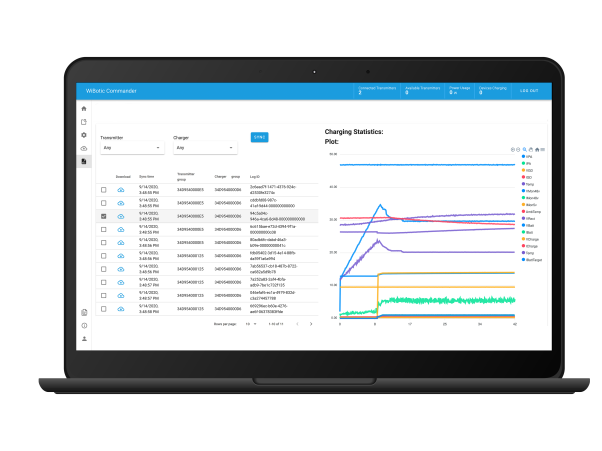
收費數據(來源:WiBotic)
能源優化
WiBotic 的無線充電系統可實現無人機的完全自主充電,因此它們可以持續待機或反復飛行,無需手動或機械更換電池。即使在沒有操作員在場的情況下,這種使用也可以讓您優化飛行時間——非常適合所有不需要專業人員在場的情況。
Commander 軟件包的目標是提供充電基礎設施的全面視圖,包括充電可用性和狀態的可視化,以及哪些充電系統使用率高于其他系統的歷史信息。運營商現在可以輕松確定充電平臺的最佳位置,以最大限度地增加無人機活動的機會。
“對于移動機器人來說,問題往往是接觸式充電站體積太大,無法放置在機器人運行的區域,”沃特斯說。“因此,機器人必須離開那個區域去充電站——讓它們長時間停止服務。更好地放置充電系統并使用更小且不顯眼的無線充電器使機器人能夠在保持在工作空間中的同時充電——例如,在短暫的停頓期間,或者在它們被加載和卸載時。”
沃特斯指出,對于無人機而言,問題更為嚴重,因為它們相對較小的電池放電速度非常快。無人機的典型飛行時間為 30 分鐘或更短,這意味著它的航程被限制在它可以在 15 分鐘內飛行的距離內,以便它有足夠的電量返回家中。“隨著最近自動飛行規則的放寬,無人機現在可以從充電站飛到充電站——大大擴展了它們的范圍,”沃特斯說。“但是,他們必須在起飛前知道下一個充電站的狀態,以免他們到達時發現另一架無人機占用了他們的著陸點或停止服務的充電站。無人機操作員必須確信充電基礎設施已經到位,可以在電力線或鐵路檢查等應用真正實現自主之前完成遠程任務。”
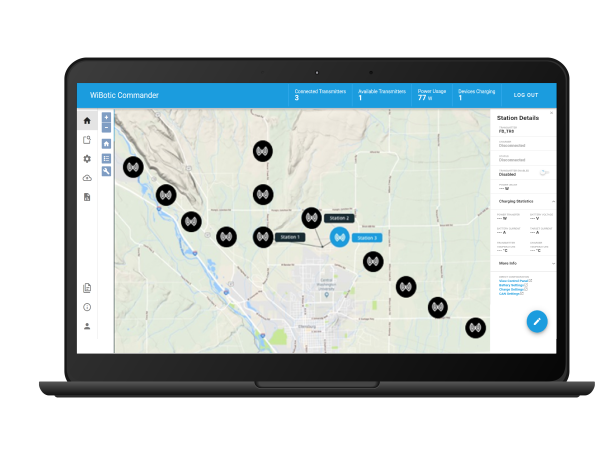
充電站地圖視圖(來源:WiBotic)
關鍵是實施主動充電技術,利用技術數據來提高電池能量。“因此,與其總是將每個電池充電到其最大電壓水平和最大可能的速度 [電流]——這是大多數充電器所做的——操作員現在可以只使用完成工作所需的能量,”沃特斯說。“例如,如果電池可以讓機器人運行 12 小時,而工作班次只有 8 小時,那么沒有理由將電池充電到 100%。通過停止在 95%,您可以將電池壽命延長 50%。充電電流也是如此。如果機器人過夜離線 12 小時,沒有理由在一小時內給電池充電。指揮官可以重置該機器人及其組中的每個機器人的充電速率,以降低充電速度,但仍可在第二天早上做好準備。”
軟件包
借助 Commander 的功能和 API,Waters 解釋了如何延長昂貴鋰電池的使用壽命,收集和存儲機器人艦隊每次電池充電的每個日志文件。“該日志文件包含有關電池的寶貴數據 [它在充電期間如何接受能量以及充電需要多長時間] 以及有關充電站的信息 [即,哪些充電站現在可用,哪些充電站歷史上被使用的次數超過其他人]”他說。“這些信息可用于重新設計充電基礎設施,讓更多機器人能夠更方便地充電——尤其是在他們需要每天多次快速充電的‘機會充電’場景中。這些數據還可用于監控電池性能,以在電池故障發生之前識別它們,或對不同品牌電池的性能進行基準測試。這些數據對于電池和充電安全法規日益增長的需求也很重要。”
用戶可以設置模式在白天快速充電,此時機器人的正常運行時間至關重要,而在夜間則更慢,以最大限度地延長整體電池壽命。“從本質上講,Commander 是一種通信機制和數據庫,用于在充電站網絡中收集和存儲信息,”Waters 說。“在當今的網絡世界中,架構盡可能靈活非常重要。我們的軟件團隊認識到了這一點,并將 Commander 開發為“docker 容器”。這意味著它是一個獨立的應用程序,幾乎可以在任何計算設備上運行,從 Windows 筆記本電腦到專用 Linux 服務器,甚至像 Raspberry Pi 這樣簡單的東西。由于這種架構,Commander 還可以托管在云中,數據收集發生在 Internet 上的全球發射器網絡中。
Commander 也可用于 IT 安全性至關重要的環境,但它也可以使用 docker RESTful 容器 API 移植到任何云。在 Commander 中看到的所有數據都可以通過調用 API 來訪問,甚至可以從外部系統自動訪問并根據收集到的信息采取行動。用戶界面提供對所有參數狀態的直接可見性,并允許用戶調整充電設置并執行系統維護,例如固件更新。“例如,倉庫管理系統可以識別機器人何時停機 10 分鐘,并可以詢問最近的 WiBotic 發射器的狀態,”Waters 說。“如果可用,它可以將機器人送到該站進行快速充電,如果需要,它甚至可以調整該充電周期的充電電壓和速度 [電流]。”
WiBotic 預計,Commander 將用于所有需要在單個設施內使用密集集群機器人的應用。“隨著我們擴展 Commander 的能力,我們將探索其直接從‘智能’電池或機器人操作系統收集充電數據的能力,”Waters 說。“這將允許軟件最終整合不使用 WiBotic 硬件的機器人。” Waters 評論說,隨著時間的推移,我們可以期待在分散的機器人網絡中得到更廣泛的采用,其中每個位置可能只有一兩個機器人,但全球有數百個位置。安全機器人、檢查機器人和送貨機器人是這些應用的例子,這些應用也將受益于更好的充電基礎設施管理。
審核編輯 黃昊宇
-
機器人
+關注
關注
211文章
28632瀏覽量
208104 -
軟件
+關注
關注
69文章
5007瀏覽量
87980 -
能源管理
+關注
關注
0文章
374瀏覽量
19153 -
無人機
+關注
關注
230文章
10515瀏覽量
181986
發布評論請先 登錄
相關推薦
能源管理系統對智慧工廠有哪些作用?

IMU加持:無人機&機器人再啟新章!
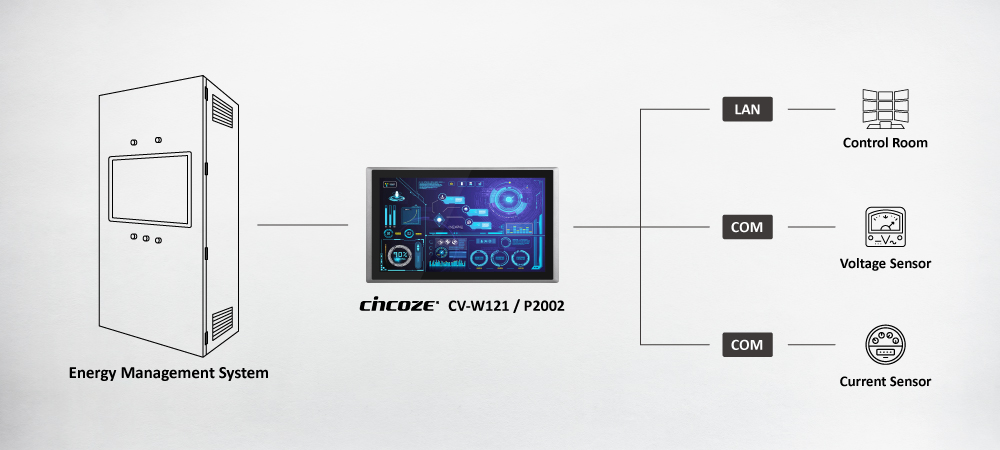
精準能源監控:Cincoze德承工業平板電腦提升能源管理效率
別墅能源管理系統通信設計方案
能源管理系統:企業節能增效的智慧之選
為什么需要能源管理系統(平臺)
智慧能源管理系統平臺是什么
無人機巡檢系統在光伏電站的應用
連鎖市場能源管理系統

第二集 知語云智能科技無人機反制技術與應用--無人機的發展歷程
能源管理系統(EMS)的作用有哪些?
無人機全景監測:空域管理的新革命
為什么要進行能源管理?





 工商網監
工商網監
評論