") 貓頭鷹mini單機系統(tǒng)基于Visbot視覺模塊的軟硬件
貓頭鷹mini單機系統(tǒng)基于Visbot視覺模塊的軟硬件
蜂群軟件架構(gòu)
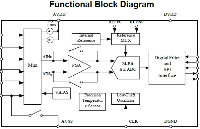
軟件架構(gòu)包括單機系統(tǒng)和算法軟件,多機協(xié)同軟件,多機通訊機制。貓頭鷹mini單機系統(tǒng)基于Visbot視覺模塊的軟硬件,Visbot模塊負責(zé)提供飛行前進方向的深度圖,同時基于Vins-fusion的雙目定位算法提供飛機的姿態(tài)定位信息。
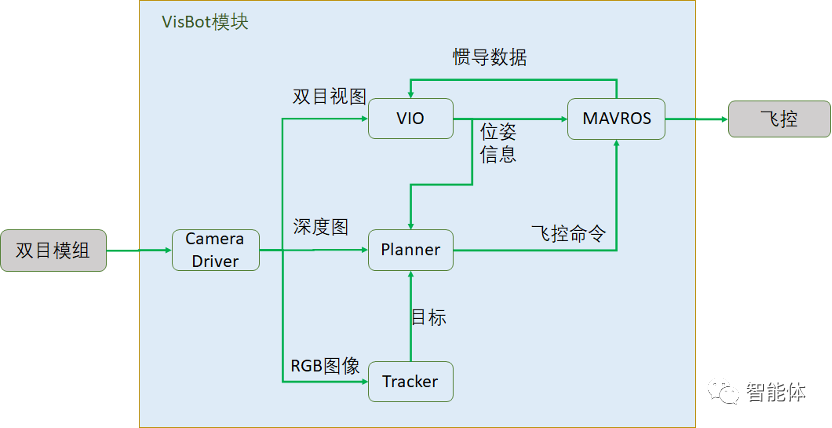
圖:Visbot視覺模塊軟硬件架構(gòu)圖
如果是單機系統(tǒng),類似于ego-planner的避障導(dǎo)航軟件就可以指導(dǎo)飛機完成避障環(huán)境下的軌跡規(guī)劃,結(jié)合我們提供的控制軟件就可以進行目標(biāo)飛行。但是如果在多機協(xié)同環(huán)境,還需要協(xié)調(diào)多機軌跡、位置、同步完成多機目標(biāo)飛行。我們適配了ego-planner-swarm開源軟件,作為多機協(xié)同下的避障導(dǎo)航軟件。它結(jié)合了多機的位置,和各自目標(biāo)下的軌跡,整體規(guī)劃出防碰撞軌跡。再結(jié)合我們提供的控制軟件就可以同步控制集群進行目標(biāo)飛行。
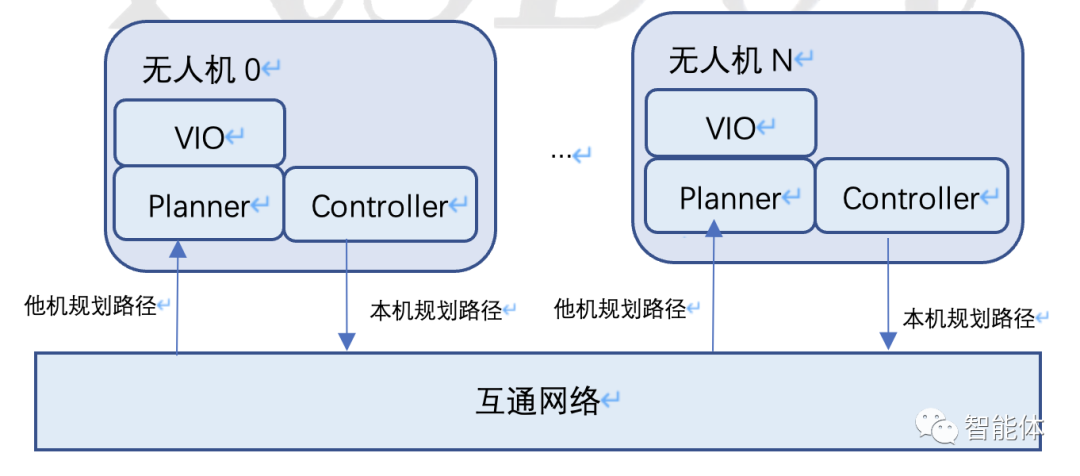
圖:多機協(xié)同架構(gòu)
在分布式多機協(xié)同系統(tǒng)中,需要互通網(wǎng)絡(luò)環(huán)境和多機通訊機制。目前引用的ego-planner-swarm軟件是基于ROS系統(tǒng)的多機通訊機制,是Master/Slave架構(gòu)的消息通訊機制。我們Visbot視覺模塊提供了Wifi接口,它可以接入大功率Wifi基站,優(yōu)勢是可以較長距離通訊;也可以配置成自組網(wǎng)模式(ROS Master配置成WifiAP), 省去Wifi基站,可以滿足小范圍的機群需求。
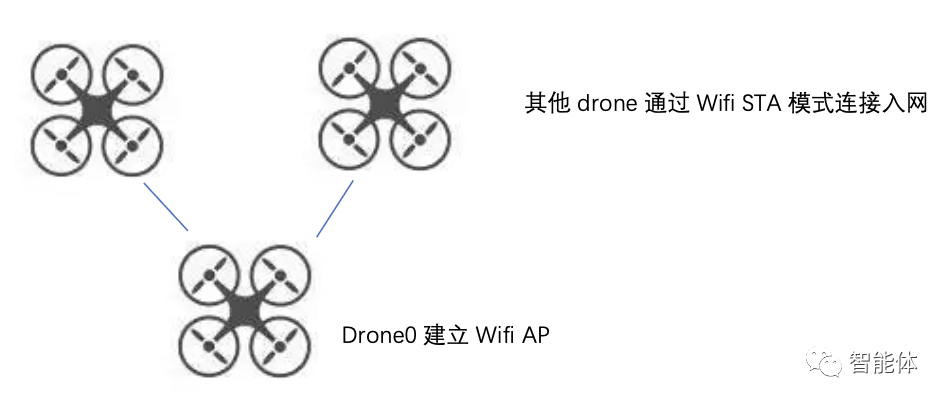
圖:純無人機Wifi組網(wǎng)
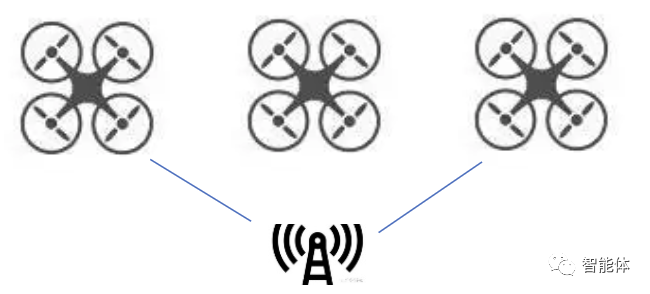
圖:基于Wifi基站無人機組網(wǎng)
關(guān)于北京威斯博
北京威斯博科技有限公司(簡稱“VisBot”)2022年創(chuàng)立,公司致力于視覺機器人領(lǐng)域的研究和產(chǎn)品開發(fā)。2022年1月和5月,先后推出了貓頭鷹和貓頭鷹mini兩款AI視覺無人機,主要為人工智能和機器人等方向教育和科研領(lǐng)域提供產(chǎn)品支持。產(chǎn)品的核心是Visbot視覺系統(tǒng),集軟/硬件于一身,可處理多類型數(shù)據(jù),運行多種智能算法。其中包括雙目,定位和避障算法的優(yōu)化。Visbot視覺系統(tǒng)是基于先進的嵌入式人工智能技術(shù),自主研發(fā)和擁有自主知識產(chǎn)權(quán)的軟/硬件系統(tǒng),可AI使能無人機,機器人等設(shè)備。視覺智能化是機器人的必然發(fā)展方向,公司致力于更智能、更高效、全自主的科研技術(shù)融入機器人世界,改變?nèi)祟惿睢?/p>
審核編輯 :李倩
-
無人機
+關(guān)注
關(guān)注
230文章
10592瀏覽量
183654 -
視覺模塊
+關(guān)注
關(guān)注
0文章
3瀏覽量
5016
原文標(biāo)題:一款不需要GPS的無人機——貓頭鷹mini
文章出處:【微信號:xiaojiaoyafpga,微信公眾號:電子森林】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
請問DLP3010AFQK在軟硬件上是否對DLP3010FQK完全兼容?
兆芯CPU近期軟硬件適配動態(tài)
恩智浦電機控制軟硬件解決方案

研華產(chǎn)品通過統(tǒng)信及兆芯通用軟硬件適配互認測試
國產(chǎn)精密信號鏈產(chǎn)品完整解決方案,軟硬件兼容TI和ADI
英特爾軟硬件構(gòu)建模塊如何幫助優(yōu)化RAG應(yīng)用

用于多路信號采集的國產(chǎn)模數(shù)轉(zhuǎn)換器,軟硬件兼容ADS1220
嵌入式系統(tǒng)軟硬件基礎(chǔ)知識大全
上線啦!深蕾半導(dǎo)體開發(fā)者中心:VS680 SoC芯片軟硬件資料、演示方案# #人工智能 #智慧能源
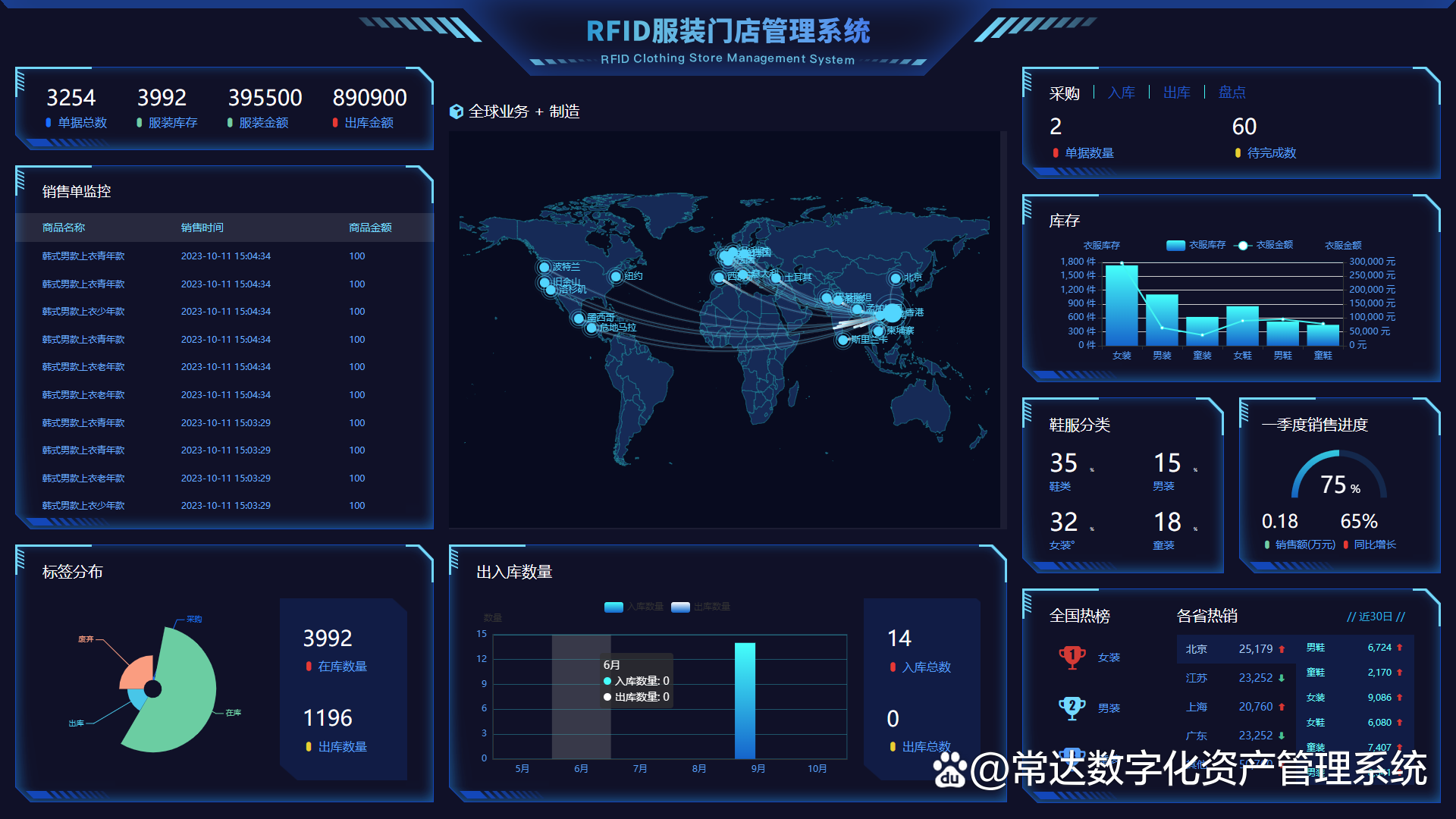
解析數(shù)字化資產(chǎn)管理系統(tǒng):RFID技術(shù)的軟硬件集成與標(biāo)簽分類應(yīng)用
智能數(shù)采網(wǎng)關(guān)助力破解軟硬件解耦難題






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論