") 慣性導(dǎo)航技術(shù)的發(fā)展歷程
慣性導(dǎo)航技術(shù)的發(fā)展歷程
導(dǎo)讀:慣性導(dǎo)航系統(tǒng)(INS,Inertial Navigation System)是一種利用慣性敏感器件、基準(zhǔn)方向及最初的位置信息來確定運(yùn)載體在慣性空間中的位置、方向和速度的自主式導(dǎo)航系統(tǒng),也簡稱為慣導(dǎo)。
慣性導(dǎo)航技術(shù)的發(fā)展歷程
第一代慣性導(dǎo)航技術(shù)指 1930 年以前的慣性技術(shù),奠定了整個(gè)慣性導(dǎo)航發(fā)展的基礎(chǔ)。牛頓三大定律成為慣性導(dǎo)航的理論。第二代慣性技術(shù)開始于上世紀(jì) 40 年代火箭發(fā)展的初期,其研究內(nèi)容從慣性儀表技術(shù)發(fā)展擴(kuò)大到慣性導(dǎo)航系統(tǒng)的應(yīng)用。70 年代初期,第三代慣性技術(shù)發(fā)展階段出現(xiàn)了一些新型陀螺、加速度計(jì)和相應(yīng)的慣性導(dǎo)航系統(tǒng),其研究目標(biāo)是進(jìn)一步提高INS 的性能,并通過多種技術(shù)途徑來推廣和應(yīng)用慣性技術(shù)。當(dāng)前,慣性技術(shù)正處于第四代發(fā)展階段,其目標(biāo)是實(shí)現(xiàn)高精度、高可靠性、低成本、小型化、數(shù)字化、應(yīng)用領(lǐng)域更加廣泛的導(dǎo)航系統(tǒng)。比如隨著量子傳感技術(shù)的迅速發(fā)展,在慣性導(dǎo)航技術(shù)中,利用原子磁共振特性構(gòu)造的微小型核磁共振陀螺慣性測量裝置具有高精度、小體積、純固態(tài)、對加速度不敏感等優(yōu)勢,成為新一代陀螺儀的研究熱點(diǎn)方向之一。
慣性導(dǎo)航的組成
慣性導(dǎo)航包括慣性測量單元(Inertial Measurement Unit,簡稱IMU)和計(jì)算單元兩大部分。通過IMU感知物體方向、姿態(tài)等變化信息,再經(jīng)過各種轉(zhuǎn)換、補(bǔ)償計(jì)算得到更準(zhǔn)確的信息。比如檢測物體的初始位置、初始朝向、初始姿態(tài)以及接下來每一刻朝向、角度的改變,然后把這些信息加一起不停地推,推算出物體現(xiàn)在的朝向和位置。
IMU主要由加速度計(jì)和陀螺儀組成,可實(shí)時(shí)檢測物體的重心方向、俯仰角、偏航角等信息,如果還加上電子羅盤和氣壓計(jì)等傳感器,那IMU的測量信息量與精度也相應(yīng)地能得到一定的提高。而計(jì)算單元?jiǎng)t主要由姿態(tài)解算單元,積分單元和誤差補(bǔ)償單元這三部分組成。
慣性導(dǎo)航的工作原理
慣性導(dǎo)航的目的是實(shí)現(xiàn)自主式導(dǎo)航,即不依賴外界信息,包括衛(wèi)星信號、北極指引等。那么慣性是如何實(shí)現(xiàn)的呢?慣性導(dǎo)航工作的核心原理是:它從過去自身的運(yùn)動軌跡推算出自己目前的方位。其工作技術(shù)原理不外乎就是以下三條基本公式:距離=速度×?xí)r間,速度=加速度×?xí)r間,角度=角速度×?xí)r間。首先,檢測(或設(shè)定好)初始信息,包括初始位置、初始朝向、初始姿態(tài)等。然后,用IMU時(shí)刻檢測物體運(yùn)動的變化信息。其中,加速度計(jì)測量加速度,利用原理 a=F/M,測量物體的線加速度,然后乘以時(shí)間得到速度,再乘以時(shí)間就得到位移,從而確定物體的位置;而陀螺儀則測量物體的角速率,以物體的初始方位作為初始條件,對角速率進(jìn)行積分,進(jìn)而時(shí)刻得到物體當(dāng)前方向;還有電子羅盤,能在水平位置確認(rèn)物體朝向。這3個(gè)傳感器可相互校正,得到較為準(zhǔn)確的姿態(tài)參數(shù)。最后,通過計(jì)算單元實(shí)現(xiàn)姿態(tài)解、加速度積分、位置計(jì)算以及誤差補(bǔ)償,最終得到準(zhǔn)確的導(dǎo)航信息。另外重點(diǎn)講講慣性導(dǎo)航是如何通過坐標(biāo)系模型實(shí)現(xiàn)定位的?日常生活中,我們都通過坐標(biāo)來定位,二維定位是x軸和y軸,三維定位則加上z軸。通過x軸、y軸和z軸的坐標(biāo)系模型,傳感器能夠測量各軸方向的線性運(yùn)動,以及圍繞各軸的旋轉(zhuǎn)運(yùn)動。但在實(shí)際應(yīng)用慣性導(dǎo)航中,慣性測量器件是直接安裝在運(yùn)動載體上的,因此慣性器件測得的角速度和加速度的數(shù)值都是在載體運(yùn)動坐標(biāo)系下的量,即傳感器得到的是以物體的固連坐標(biāo)系為參照的數(shù)據(jù)(也叫地理坐標(biāo)系),但我們?nèi)粘6ㄎ挥玫氖堑厍蜃鴺?biāo)系,因此如何把測得的固連坐標(biāo)系數(shù)據(jù)轉(zhuǎn)換成地球坐標(biāo)系數(shù)據(jù),是慣性導(dǎo)航重要的第一步。此時(shí),需要引入一個(gè)第三者才能實(shí)現(xiàn)坐標(biāo)系轉(zhuǎn)換,即相對靜止的慣性坐標(biāo)系——地心慣性系。地心慣性系:以地球的地心為原點(diǎn),以地心指向春分點(diǎn)和秋分點(diǎn)的連線為X軸、Y軸,以地球自轉(zhuǎn)軸指向北極為Z軸組成的右手坐標(biāo)系。因?yàn)榇悍贮c(diǎn)和秋分點(diǎn)不是地球表面上和地球固定的兩個(gè)點(diǎn),而是地球所屬宇宙空間中兩個(gè)固定的點(diǎn)(因?yàn)槌嗟烂婧忘S道面是固定的面)。所以,春分點(diǎn)和秋分點(diǎn)不會因?yàn)榈厍虻淖赞D(zhuǎn)而移動,故地心慣性系是相對靜止的,不會隨地球自轉(zhuǎn)而移動。
地球坐標(biāo)系:同樣以地球的地心為原點(diǎn),x 軸穿過本初子午線(0度經(jīng)線)和赤道的交點(diǎn),z 軸沿著自轉(zhuǎn)軸指向北極點(diǎn),xyz 軸成右手系。明顯,x 軸是隨地球自轉(zhuǎn)而移動,故地球坐標(biāo)系是相對運(yùn)動的,會隨地球自轉(zhuǎn)而移動。
地理坐標(biāo)系:以運(yùn)載體(如下圖的P)的中心為坐標(biāo)原點(diǎn),x 軸指向正東方向,y 軸指向正北方向,z 軸垂直指向天上。地理坐標(biāo)系會隨運(yùn)載體的移動而移動。
當(dāng)運(yùn)載體運(yùn)行到地球的 P 點(diǎn)位置時(shí),對應(yīng)的地球坐標(biāo)是什么呢?地理坐標(biāo)系需要怎樣旋轉(zhuǎn)才能和地球坐標(biāo)系重合呢?即兩者如何實(shí)現(xiàn)變換?其實(shí)就是通過一系列復(fù)雜的數(shù)字運(yùn)算,簡單而言,便是通過對應(yīng)的旋轉(zhuǎn)矩陣實(shí)現(xiàn)兩個(gè)坐標(biāo)系之間的旋轉(zhuǎn)變換。
慣性導(dǎo)航系統(tǒng)主要的優(yōu)點(diǎn)
1、完全依靠運(yùn)動載體自主地完成導(dǎo)航任務(wù),不依賴于任何外部輸入信息,也不向外輸出信息的自主式系統(tǒng),所以具備極高的抗干擾性和隱蔽性;2、不受氣象條件限制,可全天候、全天時(shí)、全地理的工作。慣導(dǎo)系統(tǒng)不需要特定的時(shí)間或者地理因素,隨時(shí)隨地都可以運(yùn)行;3、提供的參數(shù)多,比如GPS衛(wèi)星導(dǎo)航,只能給出位置,方向,速度信息,但是慣導(dǎo)同時(shí)還能提供姿態(tài)和航向信息;4、導(dǎo)航信息更新速率高,短期精度和穩(wěn)定性好。目前常見的GPS更新速率為每秒1次,但是慣導(dǎo)可以達(dá)到每秒幾百次更新甚至更高。
慣性導(dǎo)航系統(tǒng)主要的缺點(diǎn)
1、導(dǎo)航誤差隨時(shí)間發(fā)散,由于導(dǎo)航信息經(jīng)過積分運(yùn)算產(chǎn)生,定位誤差會隨時(shí)間推移而增大,長期積累會導(dǎo)致精度差;2、每次使用之前需較長的初始對準(zhǔn)時(shí)間。慣性導(dǎo)航需要初始對準(zhǔn),且對準(zhǔn)復(fù)雜、對準(zhǔn)時(shí)間較長;3、不能給出時(shí)間信息;4、精準(zhǔn)的慣導(dǎo)系統(tǒng)價(jià)格昂貴,通常造價(jià)在幾十到幾百萬之間。
慣性導(dǎo)航的分類
從結(jié)構(gòu)上分,慣導(dǎo)可分兩大類:平臺式慣導(dǎo)系統(tǒng)和捷聯(lián)式慣導(dǎo)系統(tǒng)。平臺式慣性導(dǎo)航系統(tǒng)有實(shí)體的物理平臺,陀螺和加速度計(jì)置于由陀螺定的平臺上,該平臺跟蹤導(dǎo)航坐標(biāo)系,以實(shí)現(xiàn)速度和位置解算,姿態(tài)數(shù)據(jù)直接取自于平臺的環(huán)架。由于平臺式慣導(dǎo)系統(tǒng)框架能隔離運(yùn)動載體的角振動,儀表工作條件較好,原始測量值采集精確,并且平臺能直接建立導(dǎo)航坐標(biāo)系,計(jì)算量小,容易補(bǔ)償和修正儀表的輸出,但是其結(jié)構(gòu)比較復(fù)雜,體積大,成本高且可靠性差。捷聯(lián)式慣性導(dǎo)航系統(tǒng)沒有實(shí)體的物理平臺,把陀螺和加速度計(jì)直接固定安裝在運(yùn)動載體上,實(shí)質(zhì)上是通過陀螺儀計(jì)算出一個(gè)虛擬的慣性平臺,然后把加速度計(jì)測量結(jié)果旋轉(zhuǎn)到這個(gè)虛擬平臺上,再解算導(dǎo)航參數(shù)。捷聯(lián)式慣性導(dǎo)航系統(tǒng)結(jié)構(gòu)簡單、體積小、維護(hù)方便,但陀螺儀和加速度計(jì)工作條件不佳,采集到的元器件原始測量值精度低。同時(shí),捷聯(lián)慣導(dǎo)的加速度計(jì)輸出的是載體坐標(biāo)系的加速度分量,需要經(jīng)計(jì)算機(jī)轉(zhuǎn)換成導(dǎo)航坐標(biāo)系的加速度分量,計(jì)算量較大,且容易產(chǎn)生導(dǎo)航解算的校正、起始及排列轉(zhuǎn)換的額外誤差。總體來說,捷聯(lián)慣導(dǎo)精度較平臺慣導(dǎo)低,但可靠性好、更易實(shí)現(xiàn)、成本低,是目前民用慣導(dǎo)的主流技術(shù)。
慣性導(dǎo)航主要的應(yīng)用
慣性導(dǎo)航產(chǎn)業(yè)最早起步于軍用,如航天、航空、制導(dǎo)武器、艦船、戰(zhàn)機(jī)等領(lǐng)域,隨著電子技術(shù)的發(fā)展和商業(yè)價(jià)值的挖掘,慣性導(dǎo)航技術(shù)的應(yīng)用擴(kuò)展到車輛導(dǎo)航、軌道交通、隧道、消防定位、室內(nèi)定位等民用領(lǐng)域,甚至在無人機(jī)、自動駕駛、便攜式定位終端(如智能手機(jī)、兒童/老人定位追蹤器等)中也被廣泛應(yīng)用。
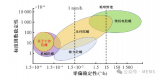
慣導(dǎo)系統(tǒng)為運(yùn)動載體提供位置、速度、姿態(tài)(航向角、俯仰角、橫滾角)等信息,不同應(yīng)用領(lǐng)域?qū)T性元器件性能和慣導(dǎo)精度的要求各不相同。從精度方面來看,航空航天、軌道交通領(lǐng)域?qū)磿r(shí)定位精度要求高,且要求連續(xù)工作時(shí)間長;從系統(tǒng)壽命來看,衛(wèi)星、空間站等航天器要求最高,因其發(fā)射升空后不可更換或維修;涉及到軍事應(yīng)用等領(lǐng)域,對可靠性要求較高;對于民用領(lǐng)域,如車輛導(dǎo)航、室內(nèi)定位、無人機(jī)、自動駕駛等應(yīng)用,對慣導(dǎo)系統(tǒng)的性價(jià)比要求高。總體來說,由于慣導(dǎo)系統(tǒng)的誤差累積性和對初始校準(zhǔn)的前提要求,一般不能單獨(dú)使用,只能作為其他主定位導(dǎo)航技術(shù)(如GNSS定位、UWB定位、WLAN定位、地磁定位等)的輔助,比如車輛在GPS導(dǎo)航過程中,在失去GPS信號的情況下能夠利用自帶的加速度和陀螺儀進(jìn)行慣性導(dǎo)航。因此需要結(jié)合具體行業(yè)應(yīng)用需求,有針對性的對慣導(dǎo)元器件和導(dǎo)航算法進(jìn)行選型。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51104瀏覽量
753614 -
導(dǎo)航技術(shù)
+關(guān)注
關(guān)注
0文章
33瀏覽量
9591 -
GPS衛(wèi)星
+關(guān)注
關(guān)注
0文章
9瀏覽量
9320
原文標(biāo)題:全面解讀慣性導(dǎo)航系統(tǒng)與技術(shù),看懂只需這一篇!
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
淺談慣性導(dǎo)航產(chǎn)品的對齊安裝角度
LP-SCADA的發(fā)展歷程和應(yīng)用行業(yè)?
導(dǎo)航分析儀的技術(shù)原理和應(yīng)用場景
直徑測量工具的發(fā)展歷程
未來隧道定位導(dǎo)航技術(shù)有哪些發(fā)展趨勢

NAND閃存的發(fā)展歷程
室外牽引AGV:慣性測量+衛(wèi)星定位+激光雷達(dá),我全都要!

AGV慣導(dǎo)應(yīng)用之無人牽引車慣性測量單元IMU

TCXO發(fā)展歷程簡述

AI大模型的發(fā)展歷程和應(yīng)用前景
3D視覺技術(shù)在慣性環(huán)上料領(lǐng)域的未來發(fā)展
AGV小車上的慣性導(dǎo)航模塊運(yùn)用——SGPM02

【行業(yè)前沿】量子技術(shù)+慣性導(dǎo)航,美國海軍研究實(shí)驗(yàn)室的最新研究成果
基于原子體系的量子慣性傳感器研究現(xiàn)狀綜述
導(dǎo)遠(yuǎn)科技在北京車展展示其自主研發(fā)的新一代MEMS慣性導(dǎo)航芯片






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論