 Uart協議及Verilog代碼
Uart協議及Verilog代碼
代碼注釋有些匆忙,如有錯誤注釋還請批評,僅作參考
Uart比較簡單,所以僅對tx作比較詳細的注釋,但里面一些內容還是值得新手學習的
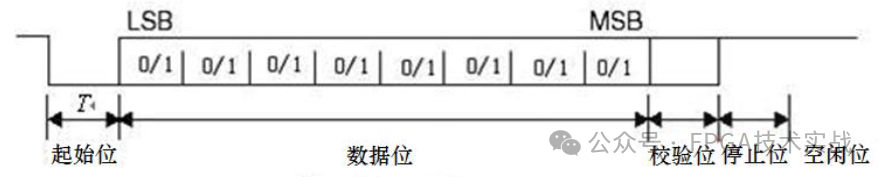
1開始位(低電平)+8位數據+1停止位(高電平,這里選的是一個周期高電平,也可兩個)(無校驗位)
1、prescale是完成一個bit需要主時鐘計數的次數(其和主時鐘以及波特率之間的關系參考網上文章)
2、進入uart模塊的異步信號,最好使用提供的同步器同步
3、異步復位信號最好使用提供的同步器同步
4、波特率任意選,只要時鐘夠大,能夠符合誤碼率計算即可,這里使用的是125Mhz
5、基本的思想就是移位
6、傳輸條件就是握手
7、如果使用Xlinx的片子,建議使用全局時鐘資源(IBUFG后面連接BUFG的方法是最基本的全局時鐘資源的使用方法)
8、這個完整的代碼就是使用IBUFG+BUFG
9、傳輸雖然簡單,但對于新手來講,還是有挺多的知識點值得學習的點
10、公眾號只是對代碼進行了簡單注釋
UART的發送數據模塊
// 歡迎大家關注公眾號:AriesOpenFPGA// Q群:808033307// Language: Verilog 2001// 代碼注釋有些匆忙,如有錯誤注釋還請批評,僅作參考// UART// 1開始位+8位數據+1停止位(無校驗)// prescale是完成一個bit需要主時鐘計數的次數(其和主時鐘以及波特率之間的關系參考網上文章)// 進入uart模塊的異步信號,最好使用提供的同步器同步// 異步復位信號最好使用提供的同步器同步// 波特率任意選,只要時鐘夠大,能夠符合誤碼率計算即可,這里使用的是125M// 基本的思想就是移位// 傳輸條件就是握手// 如果使用Xlinx的片子,建議使用全局時鐘資源(IBUFG后面連接BUFG的方法是最基本的全局時鐘資源的使用方法)// 這個完整的代碼就是使用IBUFG+BUFG// 傳輸雖然簡單,但對于新手來講,還是有挺多的知識點值得學習的// 公眾號只是對代碼進行了簡單注釋`timescale 1ns / 1ps/* AXI4-Stream UART */module uart_tx #(parameter DATA_WIDTH = 8)(input wire clk, // 系統時鐘input wire rst, // 復位信號/* AXI input */input wire [DATA_WIDTH-1:0] s_axis_tdata, // 輸入到這個模塊準備發送出去的數據input wire s_axis_tvalid, // 有數據要輸入到這個模塊output wire s_axis_tready, // 該模塊準備好接收數據output wire txd, // UART interfaceoutput wire busy, // Status 線忙input wire [15:0] prescale // Configuration 預分度);reg s_axis_tready_reg = 0;reg txd_reg = 1;reg busy_reg = 0;reg [DATA_WIDTH:0] data_reg = 0;reg [18:0] prescale_reg = 0;reg [3:0] bit_cnt = 0;assign s_axis_tready = s_axis_tready_reg;assign txd = txd_reg;assign busy = busy_reg;always @(posedge clk)beginif (rst)begins_axis_tready_reg <= 0; // 從機沒有準備好發送txd_reg <= 1; // 發送線拉高prescale_reg <= 0; //bit_cnt <= 0; // 位計數器初始化為0busy_reg <= 0; // 復位后為不忙狀態endelsebeginif (prescale_reg > 0)begins_axis_tready_reg <= 0;prescale_reg <= prescale_reg - 1;endelse if (bit_cnt == 0) //比特計數器為0begins_axis_tready_reg <= 1; // 從機把ready信號拉高busy_reg <= 0; // 忙信號拉低無效if (s_axis_tvalid) // 如果從機準備好接收數據begins_axis_tready_reg <= !s_axis_tready_reg; //prescale_reg <= (prescale << 3)-1; //bit_cnt <= DATA_WIDTH+1; // 一共10次計數data_reg <= {1'b1, s_axis_tdata}; //txd_reg <= 0; // 起始位0(起始位tx拉低,停止位拉高)busy_reg <= 1; // 開始傳輸后,傳輸線進入忙狀態endendelsebeginif (bit_cnt > 1) //beginbit_cnt <= bit_cnt - 1;prescale_reg <= (prescale << 3)-1; // 經過(prescale << 3)-1次的系統時鐘計數,完成一位的移位{data_reg, txd_reg} <= {1'b0, data_reg}; // 移位操作endelse if (bit_cnt == 1)beginbit_cnt <= bit_cnt - 1;prescale_reg <= (prescale << 3);txd_reg <= 1; // 停止位1endendendendendmodule
UART的接收模塊(不詳細講解)
Language: Verilog 20011ns / 1ps/*AXI4-Stream UART*/module uart_rx #(parameter DATA_WIDTH = 8)(input wire clk,input wire rst,AXI output */output wire [DATA_WIDTH-1:0] m_axis_tdata,output wire m_axis_tvalid,input wire m_axis_tready,UART interface */input wire rxd,Status */output wire busy,output wire overrun_error,output wire frame_error,Configuration */input wire [15:0] prescale);reg [DATA_WIDTH-1:0] m_axis_tdata_reg = 0;reg m_axis_tvalid_reg = 0;reg rxd_reg = 1;reg busy_reg = 0;reg overrun_error_reg = 0;reg frame_error_reg = 0;reg [DATA_WIDTH-1:0] data_reg = 0;reg [18:0] prescale_reg = 0;reg [3:0] bit_cnt = 0;assign m_axis_tdata = m_axis_tdata_reg;assign m_axis_tvalid = m_axis_tvalid_reg;assign busy = busy_reg;assign overrun_error = overrun_error_reg;assign frame_error = frame_error_reg;always @(posedge clk)beginif (rst) // 初始化各種參數beginm_axis_tdata_reg <= 0;m_axis_tvalid_reg <= 0;rxd_reg <= 1;prescale_reg <= 0;bit_cnt <= 0;busy_reg <= 0;overrun_error_reg <= 0;frame_error_reg <= 0;endelsebeginrxd_reg <= rxd;overrun_error_reg <= 0;frame_error_reg <= 0;if (m_axis_tvalid && m_axis_tready) // 準備有數據要發以及準被好發beginm_axis_tvalid_reg <= 0;endif (prescale_reg > 0) //beginprescale_reg <= prescale_reg - 1;endelse if (bit_cnt > 0)beginif (bit_cnt > DATA_WIDTH+1)beginif (!rxd_reg) // 實際的read為0時,開始計數bitbeginbit_cnt <= bit_cnt - 1;prescale_reg <= (prescale << 3)-1; //prescale是16位移3位減1位,因為prescale_regendelsebeginbit_cnt <= 0;prescale_reg <= 0;endendelse if (bit_cnt > 1)beginbit_cnt <= bit_cnt - 1;prescale_reg <= (prescale << 3)-1;data_reg <= {rxd_reg, data_reg[DATA_WIDTH-1:1]};endelse if (bit_cnt == 1)beginbit_cnt <= bit_cnt - 1;if (rxd_reg)beginm_axis_tdata_reg <= data_reg;m_axis_tvalid_reg <= 1;overrun_error_reg <= m_axis_tvalid_reg;endelsebeginframe_error_reg <= 1;endendendelsebeginbusy_reg <= 0;if (!rxd_reg)beginprescale_reg <= (prescale << 2)-2;bit_cnt <= DATA_WIDTH + 2;data_reg <= 0;busy_reg <= 1;endendendendendmodule
UART頂層
Language: Verilog 20011ns / 1ps/*AXI4-Stream UART*/module uart #(parameter DATA_WIDTH = 8)(input wire clk,input wire rst,/*AXI input*/input wire [DATA_WIDTH-1:0] s_axis_tdata,input wire s_axis_tvalid,output wire s_axis_tready,/*AXI output*/output wire [DATA_WIDTH-1:0] m_axis_tdata,output wire m_axis_tvalid,input wire m_axis_tready,/*UART interface*/input wire rxd,output wire txd,/*Status*/output wire tx_busy,output wire rx_busy,output wire rx_overrun_error,output wire rx_frame_error,/*Configuration*/input wire [15:0] prescale);uart_tx #(.DATA_WIDTH(DATA_WIDTH))uart_tx_inst (.clk(clk),.rst(rst),axi input.s_axis_tdata(s_axis_tdata),.s_axis_tvalid(s_axis_tvalid),.s_axis_tready(s_axis_tready),output.txd(txd),status.busy(tx_busy),configuration.prescale(prescale));uart_rx #(.DATA_WIDTH(DATA_WIDTH))uart_rx_inst (.clk(clk),.rst(rst),axi output.m_axis_tdata(m_axis_tdata),.m_axis_tvalid(m_axis_tvalid),.m_axis_tready(m_axis_tready),input.rxd(rxd),status.busy(rx_busy),.overrun_error(rx_overrun_error),.frame_error(rx_frame_error),configuration.prescale(prescale));endmodule
同步(異步復位)模塊
Language: Verilog-2001很常用的模塊1 ns / 1 ps/*Synchronizes an active-high asynchronous reset signal to a given clock byusing a pipeline of N registers.*/module sync_reset #(parameter N=2 // depth of synchronizer)(input wire clk,input wire rst,output wire sync_reset_out);reg [N-1:0] sync_reg = {N{1'b1}};assign sync_reset_out = sync_reg[N-1];always @(posedge clk or posedge rst) beginif (rst)sync_reg <= {N{1'b1}};elsesync_reg <= {sync_reg[N-2:0], 1'b0};endendmodule
同步(異步信號)模塊
// Language: Verilog-2001//很常用的模塊`timescale 1 ns / 1 ps/** Synchronizes an asyncronous signal to a given clock by using a pipeline of* two registers.*/module sync_signalparameter WIDTH=1, // width of the input and output signalsparameter N=2 // depth of synchronizer)(input wire clk,input wire [WIDTH-1:0] in,output wire [WIDTH-1:0] out);reg [WIDTH-1:0] sync_reg[N-1:0];/** The synchronized output is the last register in the pipeline.*/assign out = sync_reg[N-1];integer k;always @(posedge clk) beginsync_reg[0] <= in;for (k = 1; k < N; k = k + 1) beginsync_reg[k] <= sync_reg[k-1];endendendmodule
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Verilog
+關注
關注
28文章
1351瀏覽量
110101 -
uart
+關注
關注
22文章
1235瀏覽量
101397 -
代碼
+關注
關注
30文章
4788瀏覽量
68616
原文標題:Uart協議及Verilog代碼
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Verilog 與 ASIC 設計的關系 Verilog 代碼優化技巧
Verilog與ASIC設計的關系 Verilog作為一種硬件描述語言(HDL),在ASIC設計中扮演著至關重要的角色。ASIC(Application Specific Integrated
Verilog與VHDL的比較 Verilog HDL編程技巧
Verilog 與 VHDL 比較 1. 語法和風格 Verilog :Verilog 的語法更接近于 C 語言,對于有 C 語言背景的工程師來說,學習曲線較平緩。它支持結構化編程,代碼

Verilog硬件描述語言參考手冊
一. 關于 IEEE 1364 標準二. Verilog簡介三. 語法總結四. 編寫Verilog HDL源代碼的標準五. 設計流程
發表于 11-04 10:12
?0次下載
UART通信協議介紹和數據傳輸工作流程
UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可實現全雙工傳輸和接收。UART通常用來實現與PC之間數據通信,命令和控制信息的傳輸等。本文我們介紹UART通信協議、傳輸
怎么樣提高verilog代碼編寫水平?
,共同進步。
歡迎加入FPGA技術微信交流群14群!
交流問題(一)
Q:怎么樣提高verilog代碼編寫水平?Cpu 從事DFT工作。目前僅限于寫一些簡單模塊。自學的話如何提高verilog編寫水平
發表于 09-25 20:05
UART串口通訊協議解析
- 數據接受接口
GND - 保證兩設備共地,有統一的參考平面
通信協議
UART串口傳輸的數據被組織成數據包。每個數據包包含1個起始位,5至9個數據位,可選的奇偶校驗位和1或1.5或2個停止位
發表于 09-12 16:01
UART協議的工作原理和應用場景
UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)協議是一種廣泛使用的串行通信協議,它允許計算機與外部設備之間通過串行接口進行數據傳輸。以下是對
簡單認識UART通信協議
UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)通信協議是一種常見的串行通信協議,廣泛應用于計算機、嵌入式系統、傳感器、無線通信
簡單認識UART串行通信協議
在電子通信領域,UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)是一種非常常見的串行通信協議。它被廣泛應用于各種設備之間
UART串口通信協議是什么?
UART (Universal Asynchronous Receiver/Transmitter) 是一種通信接口協議,用于實現串口通信。它是一種簡單的、可靠的、廣泛應用的串口通信協議。它是由美國
verilog調用模塊端口對應方式
Verilog中的模塊端口對應方式,并提供示例代碼和詳細解釋,以幫助讀者更好地理解和應用。 首先,我們來了解一下Verilog中的模塊和模塊端口。一個Verilog模塊被定義為包含一組
verilog function函數的用法
Verilog 是一種硬件描述語言 (HDL),主要用于描述數字電子電路的行為和結構。在 Verilog 中,函數 (Function) 是一種用于執行特定任務并返回一個值的可重用代碼塊。函數在
最詳細的UART通訊協議分析在這里
下載本篇文章的pdf版本:UART協議分析.pdf1.協議基礎1.1.協議簡介UART是“UniversalAsynchronousRece





 工商網監
工商網監
評論