 STRUC:定義結構類型
STRUC:定義結構類型
STRUC:定義結構類型
結構是不同數據類型的組合。
可以使用點分隔符或聚合來初始化結構元素。
參數的順序無關緊要。
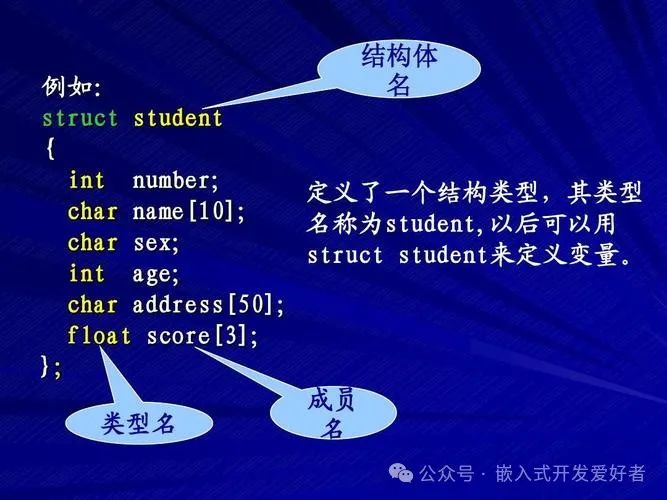
結構類型的定義 (=STRUC 數據類型)。在此將多個數據類型匯總為一個新的數據類型。
GLOBAL: 在 $CONFIG.DAT 中不允許使用用關鍵詞 GLOBAL 定義的數據類型。
名稱結構類型: 新結構類型的名稱。自定義數據類型的名稱應以 _TYP 結尾,以便可將其與變量名稱進行區分。
數據類型: 類型:任意的數據類型,即使結構類型也允許用作數據類型。
部件: 組件的名稱。在結構類型之內只允許進行一次。只在欄擁有 CHAR 類型且是一維時,才允許將其用作結構類型的組件。為此,在結構類型的定義中,在欄的名稱上將欄限制用方括號括起來。
給以 STRUC 數據類型為基礎的變量分配值有 2 種方法:
給變量的多個分量分配值:用集合
給一個變量的單個分量分配一個值:用點分隔符
集合提示:
一個集合的值可以是簡單的常數或集合本身,但是它們不能是變量
在一個集合中不必指定結構的所有分量。
分量不需要按已定義的順序指定。
在一個集合中只允許含有每個分量一次。
在集合的開頭,通過冒號隔開的結構類型名稱可能已指定。
示例:
用 REAL 數據類型的分量 NUMBER 和 CHAR 數據類型的數組分量 TEXT[80] 定義結構類型 S_TYP。
STRUC S_TYP REAL NUMBER, CHAR TEXT[80]
將集合用作集合值的示例:
STRUC INNER_TYP INT A, B, C
STRUC OUTER_TYP INNER_TYP Q, R
DECL OUTER_TYP MYVAR
...
MYVAR = {Q {A 1, B 4}, R {A 3, C 2}}
狀態 (S) 和轉角方向 (T) 是數據類型 POS 和 E6POS 的組成部分:
STRUC POS REAL X, Y, Z, A, B, C, INT S, T
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
AXIS 結構類型
A1 至 A6 是指與機器人軸 1 至 6 相關運行的角度值 (旋轉軸)或平移值(平移軸)。
STRUC AXIS REAL A1, A2, A3, A4, A5, A6
預定義結構的示例:
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
帶有點分隔符和聚合的賦值示例:
DECL POS Position ;變量聲明
;POS類型的“位置”
Position.X = 34.4 ;X 的賦值
;帶有點分隔符的組件
Position.Y = value ;Y 的賦值
;帶有點分隔符的組件
Position = {X 34.4, Y -23.2} ;賦值
審核編輯 :李倩
-
struc
+關注
關注
0文章
3瀏覽量
6847 -
變量
+關注
關注
0文章
613瀏覽量
28378 -
數據類型
+關注
關注
0文章
236瀏覽量
13624
原文標題:KUKA變量 STRUC:定義結構類型
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
射頻濾波器的定義和類型

神經網絡算法的結構有哪些類型
神經網絡結構類型和應用實例
神經網絡中激活函數的定義及類型
相序繼電器的定義和結構
時間繼電器的定義和結構
交流電機的工作原理、結構及類型
逆變器的定義、工作原理及基本結構

arcgis值類型與字段類型不兼容
網絡拓撲結構有哪幾種類型 網絡拓撲結構優缺點
求助,請問一個結構體如何全部定義到 __attribute__ 區域?
結構體與指針的關系






 工商網監
工商網監
評論