 基于三種四步的多頻外差法對投影儀的標定、系統非線性誤差
基于三種四步的多頻外差法對投影儀的標定、系統非線性誤差
引言
結構光三維測量是目前制造業中應用比較廣泛的一種非接觸式主動測量方法,其特點是能夠精確快速地實現被測物體三維信息計算。對比雙目立體視覺重建方法,結構光也是利用兩個位姿的光學元件通過三角測量實現三維重建,但由于主 動投射結構光圖案至被測物體,使得像素點之間的匹配更加容易和準確。本文所 述結構光方法均選擇多頻外差原理實現絕對相位求解,相較于其它結構光方法, 該方法測量的精度和抗干擾能力更高。
多頻外差結構光測量原理
多頻外差法是基于時間相位展開算法,該方法利用不同頻率的條紋光柵投影到
被測物體表面,并且每種頻率條紋投影過程中都會進行相應的相移變換。這種根 據時間相位展開的算法,對每個像素點的相位信息計算是獨立的,有利于對干擾 的抑制,因此多頻外差法也成為主要的結構光算法之一。
相移原理
相移的目的是計算同一頻率的條紋光柵圖的相位主值,在 N 步相移法中,假設 投影的條紋光柵光強滿足正弦分別,則條紋光柵光強分布函數有:
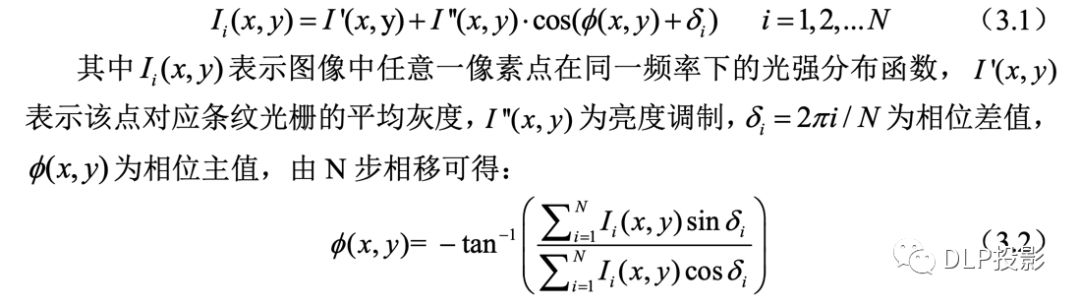
其計算過程如圖 3.1 所示。
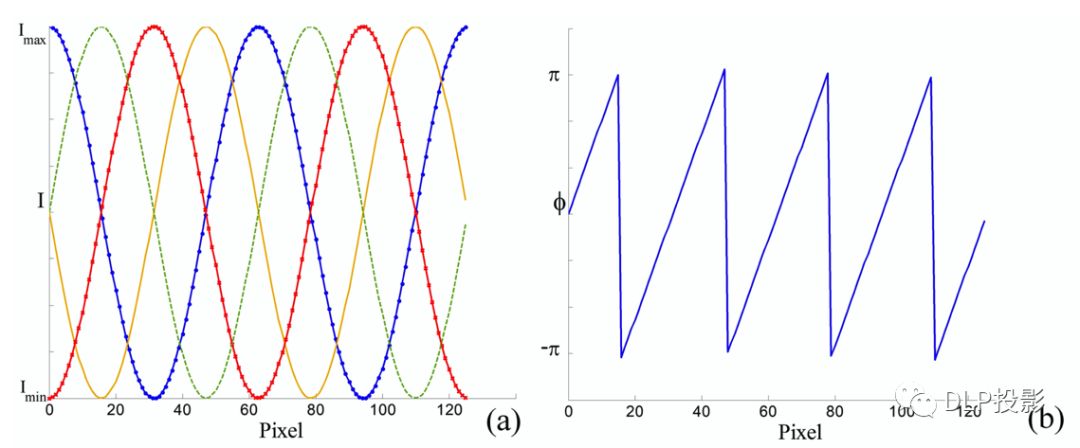
圖3.1 相移法過程
圖 3.1 中(a)中表示條紋光柵的強度,圖中有四條正弦條紋光柵,每條光柵具有 相同頻率但相位相差 π / 2 。圖(b)表示由式(3.2)計算后的相移主值圖,相位主值 圖反映了一個周期內相位值φ的變化,相位主值圖呈現出周期性鋸齒變化,在一個周期內相位值是唯一的,但在整個圖像范圍內,相位主值不存在唯一性,因此需要通過相位展開算法,將周期性的相位主值變換為只存在一個周期的絕對相位值。
相位展開
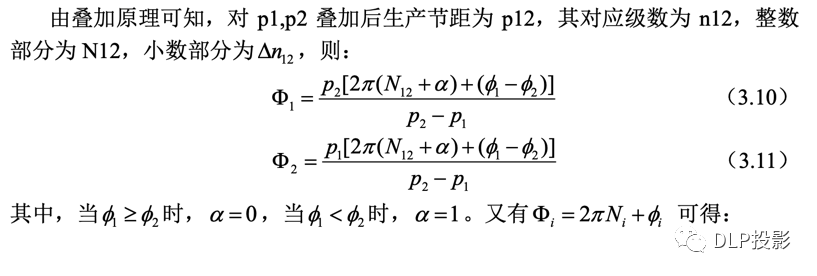
相移算法將條紋光柵中包含的相位主值?(x, y) 計算出來,但是通過相移法計算 的相位信息在整個測量范圍內出現周期性的鋸齒變化,不能保證相位值的唯一性,因此需要通過外差原理,將相位主值展開為連續變化的絕對相位值 φ(x, y) 。外差 解相原理是對不同頻率的相位主值疊加在一起進行絕對相位求取的方法。根據不 同頻率相位主值疊加原理有:

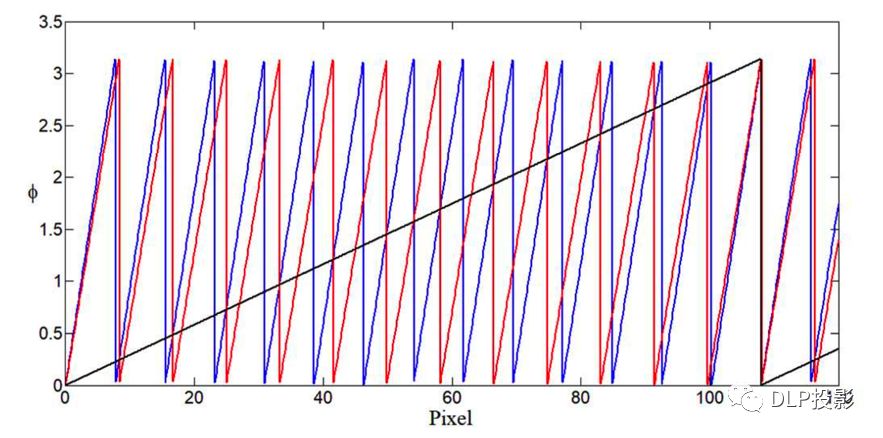
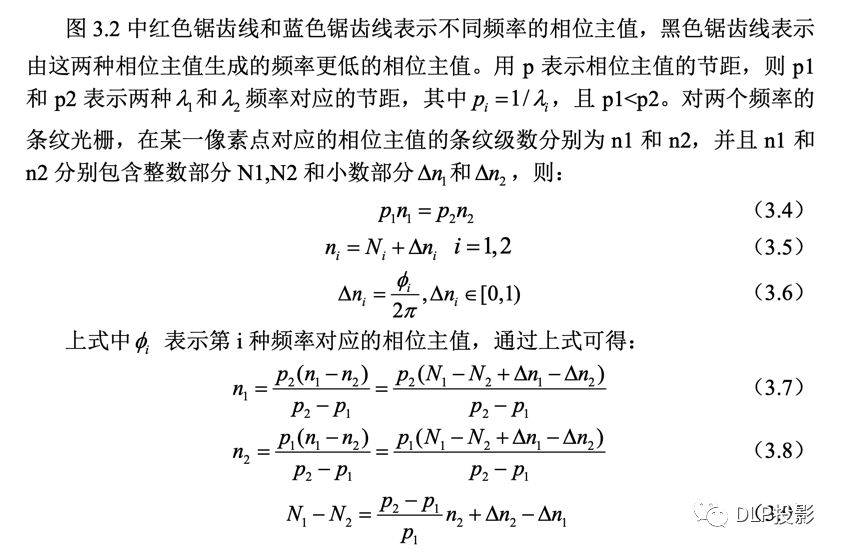
圖3.2 相位主值展開
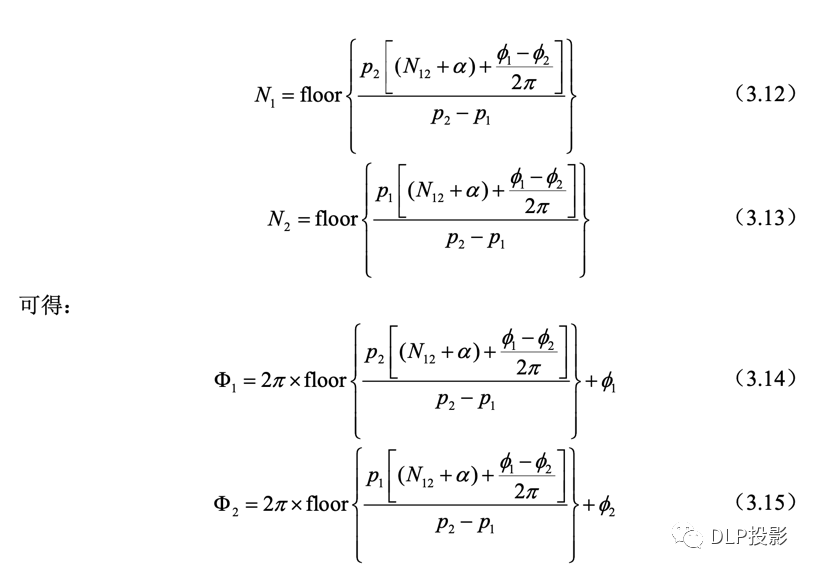
其中 floor 表示數據存在小數時,向下取整數。
目前多頻外差法主要采用三種頻率的條紋光柵進行計算,并且相移步數為四步, 因為選擇頻率只有兩種時,p1 和 p2 的節距就變得很大,此時會使得三維重建的精 度降低,重建細節模糊,如果采用更高頻率的條紋光柵進行計算[59],則對應的條 紋光柵的節距將變小,光柵的正弦化信息丟失嚴重并且增加投影圖片的數量,降低重建的速度。
深度計算
單目結構光三維重建不需要通過立體匹配得到視差值來計算深度信息,尤其是
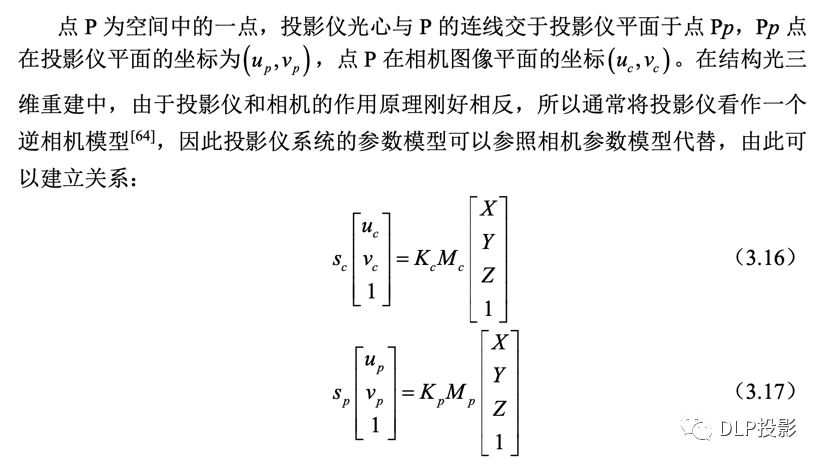
對于多頻外差法的結構光。通過相機圖像中每個像素點對應的絕對相位值即可確 定該像素點與投影儀投影平面中的像素點的匹配關系。由于投影儀的低通作用, 投射的條紋光柵圖案在空間中形成了連續變化的圖像,而相機采集的過程是將正 弦信息離散化。在相機進行絕對相位計算時,每個像素點都是獨立計算的,并且 每個像素點得到的絕對相位值是浮點類型,因此可以對其直接進行深度信息的計 算,而不需要做進一步亞像素的估算,結構光測量模型如圖 3.3 所示。
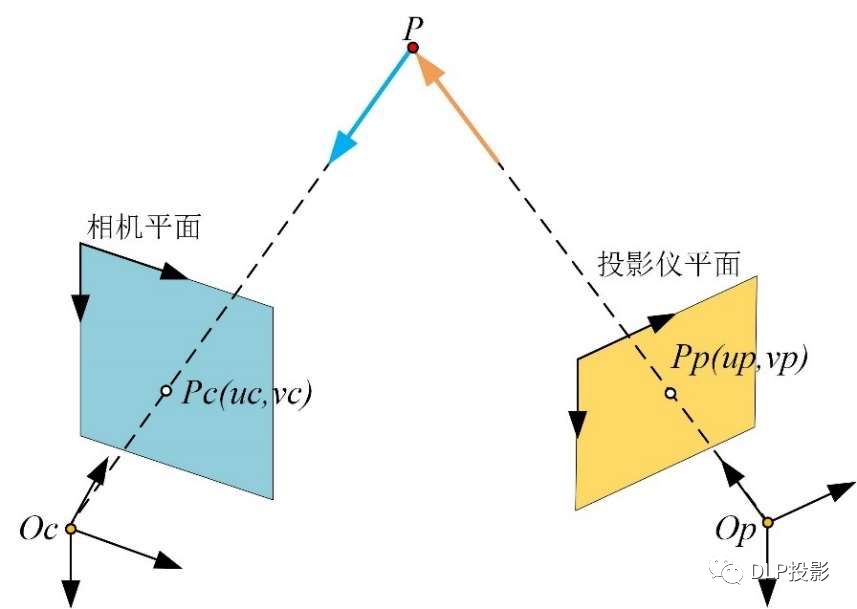
圖33 結構光測量模型
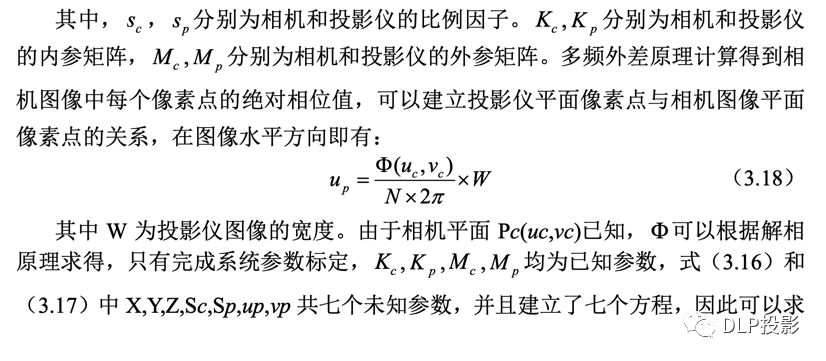
得空間中點 P 的唯一解。
在計算點 P 的空間坐標時,其精度主要依賴兩個因素:系統標定精度和解相的
準確性。系統標定精度由相機標定精度和投影儀標定精度共同決定,相機的標定 算法研究較早,并且由于其工作方式與投影儀不同,其標定方法根據成熟。目前 投影儀的標定大多采用逆相機標定方案,其標定精度依賴于相機的標定精度。因 此,對投影儀標定也是結構光三維重建中研究的重要問題之一。條紋光柵頻率和 相移的步數、條紋光柵的投影和采集的準確性以及解相中誤差的處理方法都會決 定解相位的準確性。本章通過基于三種四步的多頻外差法對投影儀的標定、系統 非線性誤差展開研究,并采用一定的優化方法,提高系統標定精度和解相的準確性。
-
光柵
+關注
關注
0文章
286瀏覽量
27518 -
投影儀
+關注
關注
4文章
879瀏覽量
43265 -
結構光算法
+關注
關注
1文章
2瀏覽量
5570
原文標題:結構光三維重建原理
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
手持微型投影儀設計方案!!!
微型投影儀的連接類型
對微型投影儀的投影技術進行分析
微型投影儀面臨的挑戰
微型投影儀的前景分析
淺談微型投影儀的投影技術
三種主流投影儀技術類型
epson投影儀怎么用_epson投影儀連接電腦
?2022年投影儀推薦,看電影、刷劇的神器
愛普生投影儀怎么樣,愛普生投影儀的優缺點






 工商網監
工商網監
評論