") 什么是PID,PID參數(shù)整定的質(zhì)量指標
什么是PID,PID參數(shù)整定的質(zhì)量指標
搞自動化的人,許多人對如何整定PID參數(shù)感到比較迷茫。這個東西其實一點都不高深,上過初中的人,只要受過嚴格訓(xùn)練,都可以成為整定參數(shù)的好手。什么?初中生理解積分微分的原理么?恩,初中生沒有學(xué)過微積分,可是一旦你給他講清楚微積分的物理意義,然后認真訓(xùn)練判斷曲線的習慣和能力,完全可以掌握好PID的參數(shù)整定。
什么是PID
要弄清楚怎樣定量之前,我們先要理解一個最基本的概念:調(diào)節(jié)器。調(diào)節(jié)器是干什么的?調(diào)節(jié)器就是人的大腦,就是一個調(diào)節(jié)系統(tǒng)的核心。任何一個控制系統(tǒng),只要具備了帶有PID的大腦或者說是控制方法,那它就是自動調(diào)節(jié)系統(tǒng)。如果沒有帶PID的控制方法呢?那可不一定不是自動調(diào)節(jié)系統(tǒng),因為后來又涌現(xiàn)各種控制思想。比如時下研究風頭最勁的模糊控制,以前還有神經(jīng)元控制等等;后來又產(chǎn)生了具有自組織能力的調(diào)節(jié)系統(tǒng),說白了也就是自動整定參數(shù)的能力;還有把模糊控制,或者神經(jīng)元控制與PID結(jié)合在一起應(yīng)用的綜合控制等等。在后面咱們還會有介紹。咱們這個文章,只要不加以特殊說明,都是指的是傳統(tǒng)的PID控制。可以這樣說:凡是具備控制思想和調(diào)節(jié)方法的系統(tǒng)都叫自動調(diào)節(jié)系統(tǒng)。而放置最核心的調(diào)節(jié)方法的東西叫做調(diào)節(jié)器。
基本的調(diào)節(jié)器具有兩個輸入量:被調(diào)量和設(shè)定值。被調(diào)量就是反映被調(diào)節(jié)對象的實際波動的量值。比如水位溫度壓力等等;設(shè)定值顧名思義,是人們設(shè)定的值,也就是人們期望被調(diào)量需要達到的值。被調(diào)量肯定是經(jīng)常變化的。而設(shè)定值可以是固定的,也可以是經(jīng)常變化的,比如電廠的AGC系統(tǒng),機組負荷的設(shè)定值就是個經(jīng)常變化的量。
基本的調(diào)節(jié)器至少有一個模擬量輸出。大腦根據(jù)情況運算之后要發(fā)布命令了,它發(fā)布一個精確的命令讓執(zhí)行機構(gòu)去按照它的要求動作。在大腦和執(zhí)行機構(gòu)(手)之間還會有其他的環(huán)節(jié),比如限幅、伺服放大器等等。有的限幅功能做在大腦里,有的伺服放大器做在執(zhí)行機構(gòu)里。
上面說的輸入輸出三個量是調(diào)節(jié)器最重要的量,其它還有許多輔助量。比如為了實現(xiàn)手自動切換,需要自動指令;為了安全,需要偏差報警等等。這些可以暫不考慮。為了思考的方便,咱們只要記住這三個量:設(shè)定值、被調(diào)量、輸出指令。
事實上,為了描述方便,大家習慣上更精簡為兩個量:輸入偏差和輸出指令。輸入偏差是被調(diào)量和設(shè)定值之間的差值,這就不用羅嗦了吧?
回到剛才的提問:什么是PID?
P就是比例,就是輸入偏差乘以一個系數(shù);
I就是積分,就是對輸入偏差進行積分運算;
D就是微分,對輸入偏差進行微分運算。
就這么簡單。很多年后,我還始終認為:這個理論真美!
這個方法的發(fā)明人似乎是尼可爾斯(Nichols)。我手頭沒有更多資料,不能確定是不是尼可爾斯發(fā)明的。可是PID參數(shù)的整定方法確實是他做的。
其實這個方法已經(jīng)被廣大系統(tǒng)維護者所采用,淺白一點說,就是先把系統(tǒng)調(diào)為純比例作用,然后增強比例作用讓系統(tǒng)震蕩,記錄下比例作用和震蕩周期,然后這個比例作用乘以0.6,積分作用適當延長。雖然本文的初衷是力圖避免繁瑣的計算公式,而用門外漢都能看懂的語言來敘述工程問題,可是對于最基本的公式還要涉及以下的,況且這個公式也很簡單,感興趣的看一下,不感興趣的可以不看哈。公式表達如下:
Kp=0.6*Km
Kd=Kp*π/4*ω
Ki=Kp*ω/π
Kp為比例控制參數(shù)
Kd為微分控制參數(shù)
Ki為積分控制參數(shù)
Km為系統(tǒng)開始振蕩時的比例值;
ω為極坐標下振蕩時的頻率
這個方法只是提供一個大致的思路,具體情況要復(fù)雜得多。比如一個水位調(diào)節(jié)系統(tǒng),微分作用可以取消,積分作用根據(jù)情況再調(diào)節(jié);還有的系統(tǒng)超出常人的理解,某些參數(shù)可以設(shè)置得非常大或者非常小。具體調(diào)節(jié)方法咱們后面會專門介紹。微分和積分對系統(tǒng)的影響狀況后面也會專門分析。
幾個基本感念
單回路:就是指有一個PID的調(diào)節(jié)系統(tǒng)。
串級:一個PID不夠用怎么辦?把兩個PID串接起來,形成一個串級調(diào)節(jié)系統(tǒng)。又叫雙回路調(diào)節(jié)系統(tǒng)。在第三章里面,咱們還會更詳細的講解串級調(diào)節(jié)系統(tǒng)。在此先不作過多介紹。
正作用:比方說一個水池有一個進水口和一個出水口,進水量固定不變,依靠調(diào)節(jié)出水口的水量調(diào)節(jié)水池水位。那么水位如果高了,就需要調(diào)節(jié)出水量增大,對于PID調(diào)節(jié)器來說,輸出隨著被調(diào)量增高而增高,降低而降低的作用,叫做正作用。
負作用:還是這個水池,我們把出水量固定不變,而依靠調(diào)節(jié)進水量來調(diào)節(jié)水池水位。那么如果水池水位增高,就需要關(guān)小進水量。對于PID調(diào)節(jié)器來說,輸出隨著被調(diào)量的增高而降低的作用叫做負作用。
動態(tài)偏差:在調(diào)節(jié)過程中,被調(diào)量和設(shè)定值之間的偏差隨時改變,任意時刻兩者之間的偏差叫做動態(tài)偏差。簡稱動差。
靜態(tài)偏差:調(diào)解趨于穩(wěn)定之后,被調(diào)量和設(shè)定值之間還存在的偏差叫做靜態(tài)偏差。簡稱靜差。
回調(diào):調(diào)節(jié)器調(diào)節(jié)作用顯現(xiàn),使得被調(diào)量開始由上升變?yōu)橄陆担蛘哂上陆底優(yōu)樯仙?/p>
PID整定中的P
所謂的P,就是比例作用,就是把調(diào)節(jié)器的輸入偏差乘以一個系數(shù),作為調(diào)節(jié)器的輸出。
溫習一下:調(diào)節(jié)器的輸入偏差就是被調(diào)量減去設(shè)定值的差值。
一般來說,設(shè)定值不會經(jīng)常改變,那就是說:當設(shè)定值不變的時候,調(diào)節(jié)器的輸出只與被調(diào)量的波動有關(guān)。那么我們可以基本上得出如下一個概念性公式:
輸出波動=被調(diào)量波動*比例增益
注意,這只是一個概念性公式,而不是真正的計算公式。咱們弄個概念性公式的目的在于:像你我這樣的聰明人,不屑于把精力用在考證那些繁瑣的公式上面,我們關(guān)注什么呢?我們關(guān)注的是公式內(nèi)部的深層含義。呵呵。我們就來努力挖掘它的深層含義。
通過概念性公式,我們可以得到如下結(jié)論,對于一個單回路調(diào)節(jié)系統(tǒng),單純的比例作用下:
輸出的波形與被調(diào)量的波形完全相似。
純比例作用的曲線判斷其實就這么一個標準。一句話簡述:被調(diào)量變化多少,輸出乘以比例系數(shù)的積就變化多少。或者說:被調(diào)量與輸出的波形完全相似
為了讓大家更深刻理解這個標準,咱們弄幾個輸出曲線和被調(diào)量曲線的推論:
1、對于正作用的調(diào)節(jié)系統(tǒng),頂點、谷底均發(fā)生在同一時刻。
2、對于負作用的調(diào)節(jié)系統(tǒng),被調(diào)量的頂點就是輸出的谷底,谷底就是輸出的頂點。
3、對于正作用的調(diào)節(jié)系統(tǒng),被調(diào)量的曲線上升,輸出曲線就上升;被調(diào)量曲線下降,輸出曲線就下降。兩者趨勢完全一樣。
4、對于負作用的調(diào)節(jié)系統(tǒng),被調(diào)量曲線和輸出曲線相對。
5、波動周期完全一致。
5、只要被調(diào)量變化,輸出就變化;被調(diào)量不變化,不管靜態(tài)偏差有多大,輸出也不會變化。
上面5條推論很重要,請大家牢牢記住。記住不記住其實沒有關(guān)系,只要你能把它溶化在你的思想里也行。
溶化了么?那我出個思考題:
1、被調(diào)量回調(diào)的時候,輸出必然回調(diào)么?
2、被調(diào)量不動,設(shè)定值改變,輸出怎么辦?
3、存在單純的比例調(diào)節(jié)系統(tǒng)么?
4、純比例調(diào)節(jié)系統(tǒng)會消除靜差么?
第一條回答:是。
第二條回答:相當于被調(diào)量朝相反方向改變。你想啊,調(diào)節(jié)器的輸出等于輸入偏差乘以一個系數(shù),設(shè)定值改變就相當于設(shè)定值不變被調(diào)量突變。對吧?
第三條回答:是。在電腦出現(xiàn)之前,還沒有DCS,也沒有集中控制系統(tǒng)。為了節(jié)省空間和金錢,對于一些最簡單的有自平衡能力的調(diào)節(jié)系統(tǒng),比如水池水位,就用一個單純的比例調(diào)節(jié)系統(tǒng)完成調(diào)節(jié)。
第四條回答:否。單純的比例調(diào)節(jié)系統(tǒng)可以讓系統(tǒng)穩(wěn)定,可是他沒有辦法消除靜態(tài)偏差。那么怎么才能消除靜態(tài)偏差呢?依靠積分調(diào)節(jié)作用。
PID中的I
I就是積分作用。
一句話簡述:如果調(diào)節(jié)器的輸如偏差不等于零,就讓調(diào)節(jié)器的輸出按照一定的速度一直朝一個方向累加下去。
積分相當于一個斜率發(fā)生器。啟動這個發(fā)生器的前提是調(diào)節(jié)器的輸如偏差不等于零,斜率的大小與兩個參數(shù)有關(guān):輸入偏差的大小、積分時間。
在許多調(diào)節(jié)系統(tǒng)中,規(guī)定單純的比例作用是不存在的。它必須要和比例作用配合在一起使用才有意義。我不知道是不是所有的系統(tǒng)都有這么一個規(guī)定,之所以說是個規(guī)定,是因為,從原理上講,純積分作用可以存在,但是很可能沒有實用意義。這里不作過分的空想和假設(shè)。為了分析方便,咱們把積分作用剝離開來,對其作單純的分析。
那么單純積分作用的特性總結(jié)如下:
1、 輸出的升降與被調(diào)量的升降無關(guān),與輸入偏差的正負有關(guān)。
2、 輸出的升降與被調(diào)量的大小無關(guān)。
3、 輸出的斜率與被調(diào)量的大小有關(guān)。
4、 被調(diào)量不管怎么變化,輸出始終不會出現(xiàn)節(jié)躍擾動。
5、 被調(diào)量達到頂點的時候,輸出的變化趨勢不變,速率開始減緩。
6、 輸出曲線達到頂點的時候,必然是輸入偏差等于零的時候。
PID中的D
D就是微分作用。單純的微分作用是不存在的。同積分作用一樣,我們之所以要把微分作用單獨隔離開來講,就是為了理解的方便。
一句話簡述:被調(diào)量不動,輸出不動;被調(diào)量一動,輸出馬上跳。
根據(jù)微分作用的特點,咱們可以得出如下曲線的推論:
1、 微分作用與被調(diào)量的大小無關(guān),與被調(diào)量的變化速率有關(guān);
2、 與被調(diào)量的正負無關(guān),與被調(diào)量的變化趨勢有關(guān);
3、 如果被調(diào)量有一個,就相當于輸入變化的速度無窮大,那么輸出會直接到最小或者最大;
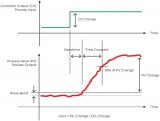
4、 微分參數(shù)有的是一個,用微分時間表示。有的分為兩個:微分增益和微分時間。微分增益 表示輸出波動的幅度,搏動后還要輸出回歸,微分時間表示回歸的快慢。見圖4,KD是微分增益,TD是微分時間。
5、 由第4條得出推論:波動調(diào)節(jié)之后,輸出還會自動拐回頭。
比例作用:輸出與輸入曲線相似。
積分作用:只要輸入有偏差輸出就變化。
微分作用:輸入有抖動輸出才變化,且會猛變化。
比例積分作用,就是在被調(diào)量波動的時候,純比例和純積分作用的疊加,簡單的疊加。
我們在整定系統(tǒng)的時候,要有這么一個觀念:比例積分微分三個參數(shù)的大小都不是絕對的,都是相對的。切不可以為我發(fā)現(xiàn)一個參數(shù)比較合適,就把這個參數(shù)固定死,不管別的參數(shù)怎么變化,永遠不動前面固定的參數(shù)。這樣的整定是機械的整定,要不得的。我們要在多個參數(shù)之間反復(fù)權(quán)衡,既要把握原則性,又要學(xué)會靈活性。
PID參數(shù)整定的質(zhì)量指標
教科書里說的指標早就忘了,相關(guān)規(guī)定里面說的指標也沒工夫細看。根據(jù)我的經(jīng)驗,這幾個指標需要重視:
1、衰減率:大約為0.75最好。好的自動調(diào)節(jié)系統(tǒng),用俗話說“一大一小兩個波”最好。用數(shù)學(xué)方法表示出來,就是合適的衰減率。
2、最大偏差:一個擾動來臨之后,經(jīng)過調(diào)節(jié),系統(tǒng)穩(wěn)定后,被調(diào)量與設(shè)定值的最大偏差。一個整定好的穩(wěn)定的調(diào)節(jié)系統(tǒng),一般第一個波動最大,因為“一大一小兩個波”,后面就趨于穩(wěn)定了。如果不能趨于穩(wěn)定,也就是說不是穩(wěn)態(tài),那就談不上調(diào)節(jié)質(zhì)量,也就無所謂最大偏差了。
3、波動范圍:顧名思義,沒必要多說。實際運行中的調(diào)節(jié)系統(tǒng),擾動因素是不斷存在的,因而被調(diào)量是不斷波動著的,所以波動范圍基本要達到一個區(qū)間。
4、執(zhí)行機構(gòu)動作次數(shù):動作次數(shù)決定了執(zhí)行機構(gòu)的壽命。這里說的執(zhí)行機構(gòu)不光包括執(zhí)行器,還包括調(diào)節(jié)閥門。執(zhí)行機構(gòu)頻繁動作不光損壞執(zhí)行器,還會讓閥門線性惡化。下一節(jié)會更加詳細的予以說明。
5、穩(wěn)定時間:階躍擾動后,被調(diào)量回到穩(wěn)態(tài)所需要的時間。穩(wěn)定時間決定了系統(tǒng)抑制干擾偶的速度。
整定系統(tǒng)需要注意的幾個問題
1、執(zhí)行機構(gòu)動作次數(shù)
執(zhí)行機構(gòu)動作次數(shù)不能過頻,過頻則容易燒壞電機。動作次數(shù)與比例積分微分作用都有關(guān)系。一般來說,合適的比例帶使得系統(tǒng)波動較小,調(diào)節(jié)器的輸出波動也就小,執(zhí)行器波動也少;積分的章節(jié)已經(jīng)說過:如果輸入偏差不為零,積分作用就會讓輸出一直向一個方向積下去。積分過強的話,會讓執(zhí)行器一次只動作一點,但是頻繁地一點點向一個方向動作;微分作用會讓執(zhí)行器反復(fù)波動。
一般來說,國產(chǎn)DKJ系列的執(zhí)行器的電機耐堵轉(zhuǎn)特性較好,其它性能不一。電機在剛得電動作的時候,電流大約是正常運轉(zhuǎn)電流的5-10倍。電機頻繁動作很容易升溫,從而燒壞電機。另外對執(zhí)行機構(gòu)的傳動部件也有較大磨損。
一般來說,不管對于直行程還是角行程,對于國產(chǎn)還是進口,對于智能還是簡單的執(zhí)行器,動作次數(shù)不大于10次/分鐘。對于一些進口執(zhí)行器,尤其是日本的,次數(shù)還要減少。
對于執(zhí)行機構(gòu)是變頻調(diào)節(jié)的(這里是說純變頻調(diào)節(jié),而不是指執(zhí)行機構(gòu)采用變頻電機),可以讓參數(shù)快點,因為變頻器始終處于運行狀態(tài)。需要注意的是,變頻器轉(zhuǎn)速線性不能太陡,否則變頻器輸出電流大幅度變化,影響變頻壽命。
2、PID死區(qū)問題
為了減少執(zhí)行器動作次數(shù),一般都對PID調(diào)節(jié)器設(shè)置個死區(qū)。在±死區(qū)內(nèi),都認為輸入偏差為0。當超過死區(qū)后,輸入偏差才從0開始計算。死區(qū)可以有效減少執(zhí)行器的動作次數(shù)。但是死區(qū)過大的話又帶來了新的問題:調(diào)節(jié)精度降低,對于一般的調(diào)節(jié)系統(tǒng),不要求調(diào)節(jié)精度過高,精度高意義也不大。
提高死區(qū)降低精度的同時,也會降低調(diào)節(jié)系統(tǒng)穩(wěn)定性。因為它造成了調(diào)節(jié)滯后。這一點不大容易被人理解。
3、 裕度問題
調(diào)節(jié)系統(tǒng)要有一個合適的調(diào)節(jié)裕度。如果執(zhí)行機構(gòu)經(jīng)常處于關(guān)閉或者開滿狀態(tài),那么調(diào)節(jié)裕度就很小,調(diào)節(jié)質(zhì)量就受到影響。一般來說——都無數(shù)個“一般來說”了,誰讓現(xiàn)場情況復(fù)雜,咱們不能把話說絕了呢——閥門在80%以上,流量已經(jīng)達到最大,所以執(zhí)行機構(gòu)經(jīng)常開度在80%也可以說裕度減小了。
這里所說的閥門,包括了各種調(diào)節(jié)工質(zhì)流量的機構(gòu),包括閥門、泵的調(diào)速部分等。在第三章中,咱們專門要說一下執(zhí)行機構(gòu)的種類。
4、 通流量問題
調(diào)節(jié)閥門的孔徑都是經(jīng)過嚴格計算的。不過也存在計算失誤的時候。通流量過大,執(zhí)行機構(gòu)稍微動作一點就可能發(fā)生超調(diào);反之執(zhí)行機構(gòu)大幅度動作還不能抑制干擾。所以這個問題也是個重要問題。如果通流量不合適,有些系統(tǒng)甚至不可能穩(wěn)定運行。
5、 空行程問題
在一定的開度內(nèi),調(diào)節(jié)器輸出有變化,執(zhí)行器也動作了,可是閥門流量沒變化,這屬于空行程問題。空行程有是執(zhí)行其產(chǎn)生的,也有法門產(chǎn)生的。一般的機構(gòu)都存在這個問題。空行程一般都比較小,可以忽略。可是如果過大,就不得不要重視這個問題了。
解決空行程的辦法有很多,一般都在DCS內(nèi)完成。當然,如果執(zhí)行器和閥門能夠解決的,要以硬件解決為主。
6、 線性問題
一般來說閥門開度與流量的關(guān)系都成平滑的線性關(guān)系。如果閥門使用時間長,或者閥門受到損傷,線性就會改變。線性問題可以有多種解決辦法,既有參數(shù)整定的,也有控制策略的。當然最根本的解決辦法在于對線性惡化的治理。如果是比較貴重的調(diào)速泵線性惡化,難以治理更換,那只好從調(diào)節(jié)系統(tǒng)尋找解決辦法了。
還有個在火電廠中普遍存在的問題:減溫水調(diào)節(jié)閥的線性惡化。這基本上是個頑疾。因為減溫水調(diào)節(jié)閥動作頻繁,經(jīng)常在完全關(guān)閉和打開之間反復(fù)波動,相當多的電廠減溫水閥門線性都很不好,而且還伴隨著空行程偏大。兩個問題加起來,給自動調(diào)節(jié)帶來很大的困難。
7、 耦合問題
一個調(diào)節(jié)系統(tǒng)或者執(zhí)行機構(gòu)的調(diào)節(jié),對另一個系統(tǒng)產(chǎn)生干擾互相干擾,或者是兩個調(diào)節(jié)系統(tǒng)間互為干擾,產(chǎn)生直接耦合。解耦的辦法是先整定主動干擾的調(diào)節(jié)系統(tǒng),再整定被動系統(tǒng)。也可以在主動干擾的輸出乘以一個系數(shù),作為被動干擾的前饋。
還有一種間接耦合。這個現(xiàn)象在協(xié)調(diào)控制中比較明顯:負荷與汽壓的關(guān)系是互為耦合。解決問題的辦法有兩種:一種是互為修正前饋,這個解決辦法的應(yīng)用比較普遍,效果不是太好;更有效的辦法是整定參數(shù),效果要比前者優(yōu)越得多,抗干擾能力也很大,可惜擅長此道的人太少。
整定參數(shù)的幾個認識誤區(qū)
1、對微分的認識誤區(qū)
認為微分就是超前調(diào)節(jié),如果被調(diào)量或者測量值有滯后,就要加微分。微分是有超前調(diào)節(jié)的功能,但是微分作用有些地方不能用:測量值存在不間斷的微小波動的時候。尤其是水位、氣壓測量,波動始終存在,我們一直在考慮濾波呢,再加個微分,就會造成調(diào)節(jié)干擾。不如不要微分。
2、對積分的認識誤區(qū)
有些人發(fā)現(xiàn)偏差就要調(diào)積分,偏差存在有可能是系統(tǒng)調(diào)節(jié)緩慢,比例作用也有可能影響,如果積分作用蓋過了比例作用,那么這個系統(tǒng)就很難穩(wěn)定。咱們上面說過:初學(xué)者容易強調(diào)積分作用,熟練者容易忽略積分作用。不再贅述。
3、對耦合系統(tǒng)中,超前調(diào)節(jié)的認識誤區(qū)
對于耦合系統(tǒng),不管初學(xué)者熟練者都容易考慮一個捷徑:增加前饋調(diào)節(jié)。這個問題甚至搞自動控制的老手都容易犯,畢竟捷徑誰都想走。比如眾所周知的協(xié)調(diào)控制,經(jīng)典控制法中,就有負荷和汽壓互為前饋的控制策略設(shè)計。這個方法也不為錯,但是更普適更好的方法是一種整定參數(shù)的思想,參數(shù)設(shè)置合理的話這個前饋畫蛇添足。要積極探討各種控制辦法。
4、反饋過強
復(fù)雜調(diào)節(jié)系統(tǒng)中,前饋信號和反饋信號過強的話,會造成系統(tǒng)震蕩,所以調(diào)解過程中不僅僅要注意PID參數(shù),還要注意反饋參數(shù)。
尤其在汽包水位三沖量調(diào)節(jié)系統(tǒng)中,蒸汽流量和給水流量的信號都要經(jīng)過系數(shù)處理。有些未經(jīng)處理的系統(tǒng),在負荷波動的時候,就要退掉自動,否則會發(fā)生震蕩的危險。
5、死搬標準,強調(diào)個別指標
教科書里,自動調(diào)節(jié)系統(tǒng)需要關(guān)注的指標有很多。這些指標都有助于自動調(diào)節(jié)系統(tǒng)的整定。但是自動好不好,不要硬套指標。最應(yīng)關(guān)注的有兩個指標:被調(diào)量波動范圍、執(zhí)行機構(gòu)動作次數(shù),其他都不是最必要的。
曾經(jīng)有一次,我?guī)椭粋€電廠整定自動調(diào)節(jié)系統(tǒng)。快要結(jié)束的時候,對方專工說:按照國家制定的自動調(diào)節(jié)系統(tǒng)調(diào)試標準,在多大干擾的情況下,系統(tǒng)恢復(fù)穩(wěn)定的時間要小于若干分鐘。我說按照這個標準,調(diào)節(jié)系統(tǒng)可能會發(fā)生震蕩。對方說震蕩沒關(guān)系,只要能達到國家標準就可以。我重新整定系統(tǒng)后完全可以達到這個標準,可是再強調(diào)系統(tǒng)存在震蕩的可能——大干擾情況下難以穩(wěn)定——半個月后,這個參數(shù)下,該執(zhí)行器燒壞。
6、改變設(shè)定值以抑制超調(diào)
頻繁改變設(shè)定值是干擾自動調(diào)節(jié)。尤其減溫水系統(tǒng),沒有必要依靠改變設(shè)定值來抑制超調(diào)。那么什么情況下,需要人為干擾呢?
在系統(tǒng)輸出長時間最大或者最小的時候,說明達到了積分飽和,需要退出系統(tǒng),然后再投即可。頻繁改變設(shè)定值是干擾自動調(diào)節(jié)
7、主調(diào)快還是副調(diào)快?
因系統(tǒng)而定,因參數(shù)而定。常規(guī)參數(shù):主調(diào)的比例弱,積分強,以消除靜差;副調(diào)的比例強,積分弱,以消除干擾。不絕對。
PID整定參數(shù)口訣
口訣一:
參數(shù)整定找最佳, 從小到大順序查。
先是比例后積分, 最后再把微分加。
曲線振蕩很頻繁, 比例度盤要放大。
曲線漂浮繞大彎, 比例度盤往小扳。
曲線偏離回復(fù)慢, 積分時間往下降。
曲線波動周期長, 積分時間再加長。
曲線振蕩頻率快, 先把微分降下來。
動差大來波動慢, 微分時間應(yīng)加長。
理想曲線兩個波, 前高后低四比一。
一看二調(diào)多分析, 調(diào)節(jié)質(zhì)量不會低。
口訣二:
自動調(diào)節(jié)并不難,復(fù)雜系統(tǒng)化簡單。
整定要練硬功夫,圖形特征看熟練。
趨勢讀定三要素,設(shè)定被調(diào)和輸出。
三個曲線放一起,然后曲線能判讀。
積分微分先去掉,死區(qū)暫時也不要。
比例曲線最簡單,被調(diào)、輸出一般般。
頂點谷底同時刻,升降同時同拐點。
波動周期都一樣,靜態(tài)偏差沒法辦。
比例從弱漸調(diào)強,階躍響應(yīng)記時間。
時間放大十來倍,調(diào)節(jié)周期約在內(nèi)。
然后比例再加強,沒有周期才算對。
靜差消除靠積分,能消靜差就算穩(wěn)。
不管被調(diào)升或降,輸出只管偏差存。
輸入偏差等于零,輸出才會不積分。
積分不可加太強,干擾調(diào)節(jié)成擾因。
被調(diào)拐點零點間,輸出拐點仔細辨,
積分拐點再靠前,既消靜差又不亂。
微分分辨最容易,輸入偏差多注意。
偏差不動微分死,偏差一動就積極。
跳動之后自動回,微分時間管回歸。
系統(tǒng)若有大延遲,微分超前最適宜。
風壓水位易波動,微分作用要丟棄。
比例積分和微分,曲線判讀特征真。
如果不會看曲線,多看杖策行吟文。
綜合比較靈活用,盛極而衰來扼殺因。
最后,大家看過百家講壇里面王廣雄教授講自動調(diào)節(jié)系統(tǒng)么?我沒有看過,很遺憾。不過我聽別人說王教授這么說自動調(diào)節(jié)系統(tǒng):她里面處處閃爍著哲學(xué)的光輝。這個光輝我也經(jīng)常感覺得到。并且我覺得,似乎它不僅僅是一門技術(shù),而且還是一門藝術(shù)。因為對于一個復(fù)雜的自動調(diào)節(jié)系統(tǒng),你永遠不能確定哪個參數(shù)是最好的。只要你愿意下功夫去整定,似乎總有更適合的參數(shù)等著你。而等到一個系統(tǒng)遇到了很復(fù)雜的大干擾的時候,一般情況下,你總想修改已經(jīng)極其膨脹了的控制策略,效果雖有好轉(zhuǎn),可總是難以適應(yīng)各種工況,參數(shù)愈來愈多,整定愈來愈復(fù)雜。可是等到你某一天突然靈光一閃,想到一個新鮮思路的時候,你激動得恨不得馬上從床上爬下來要去應(yīng)用,第二天你發(fā)現(xiàn)既不需要修改控制策略,應(yīng)用效果又出奇的好的時候,你會感到一種藝術(shù)的成就感和滿足感。 這就是自動調(diào)節(jié)系統(tǒng)的魅力。它需要你在各個問題、各個參數(shù)之間反復(fù)權(quán)衡,在靈活性和原則性之間思想游走,在全面和孤立之間合并分解。
審核編輯 :李倩
-
PID
+關(guān)注
關(guān)注
35文章
1472瀏覽量
85524 -
調(diào)節(jié)器
+關(guān)注
關(guān)注
5文章
848瀏覽量
46417
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用Python實現(xiàn)PID控制
如何調(diào)節(jié)PID參數(shù) PID控制器的調(diào)試方法
在焊接中應(yīng)用PID控制技術(shù)
PID控制的優(yōu)缺點分析 PID參數(shù)調(diào)節(jié)的常見方法
如何使用PID進行溫度控制
為什么要對控制系統(tǒng)進行整定
第九章-PID整定方法 STM32PID驅(qū)動編碼器 STM32PID控制電機轉(zhuǎn)速

PID在工業(yè)控制領(lǐng)域的應(yīng)用
位置式PID與增量式PID的區(qū)別
什么是PID?PID各個參數(shù)有什么作用?
淺談PID回路整定的兩種方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論