") 基于ORB特征的三維定位與地圖構(gòu)建算法
基于ORB特征的三維定位與地圖構(gòu)建算法
這文章相當于被追屁股后面寫的東西了,拿到地平線的板子一直準備做點什么東西出來。
不辜負是不辜負,有個雷達能干嘛,裝頭上嗎?
自到我看見了這個塵封已久的小飛機
dji專屬教育小飛機,嘖,可以編程哪種
寫過無數(shù)了,感興趣的大家自己搜索一下
x3很牛,TT也牛,但是我不牛,我得讓他牛,所以我決定搞個SLAM使用。TT有一個單目的相機,還有一個IMU,以及開放的接口。所以有這個潛力,其次也能學一手ROS2.事實上是我太年輕了,后面再說。
在SLAM框架上面我肯定自己寫不了,這里研究了一下午,使用了ORB-SLAM。
ORB-SLAM是一種基于ORB特征的三維定位與地圖構(gòu)建算法(SLAM)[1]。該算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年發(fā)表在IEEE Transactions on Robotics。ORB-SLAM基于PTAM架構(gòu),增加了地圖初始化和閉環(huán)檢測的功能,優(yōu)化了關(guān)鍵幀選取和地圖構(gòu)建的方法,在處理速度、追蹤效果和地圖精度上都取得了不錯的效果。要注意ORB-SLAM構(gòu)建的地圖是稀疏的。
ORB-SLAM一開始基于monocular camera,后來擴展到Stereo和RGB-D sensor上。作者好像還會做Semi-dense mapping的擴展。作者的開源代碼都在GIT上。
ORB-SLAM算法的一大特點是在所有步驟統(tǒng)一使用圖像的ORB特征。ORB特征是一種非常快速的特征提取方法,具有旋轉(zhuǎn)不變性,并可以利用金字塔構(gòu)建出尺度不變性。使用統(tǒng)一的ORB特征有助于SLAM算法在特征提取與追蹤、關(guān)鍵幀選取、三維重建、閉環(huán)檢測等步驟具有內(nèi)生的一致性。
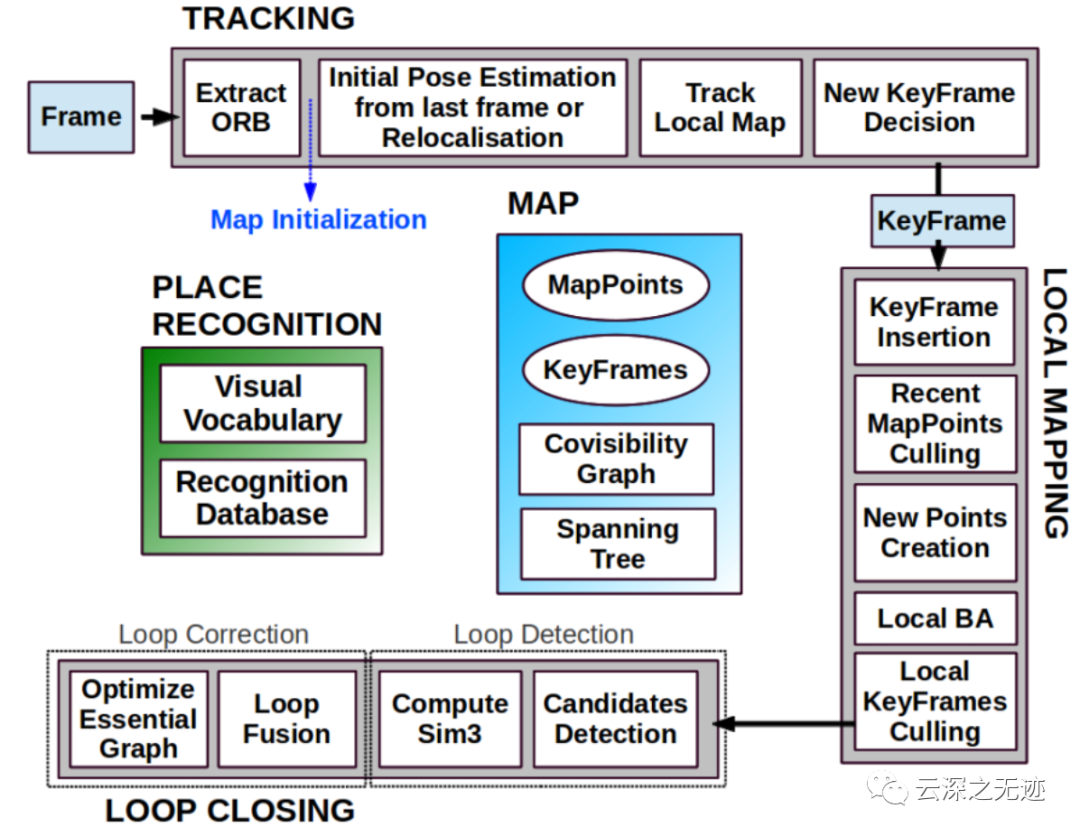
架構(gòu)圖
ORB-SLAM利用三個線程分別進行追蹤、地圖構(gòu)建和閉環(huán)檢測。
一、追蹤
ORB特征提取
初始姿態(tài)估計(速度估計)
姿態(tài)優(yōu)化(Track local map,利用鄰近的地圖點尋找更多的特征匹配,優(yōu)化姿態(tài))
選取關(guān)鍵幀
二、地圖構(gòu)建
加入關(guān)鍵幀(更新各種圖)
驗證最近加入的地圖點(去除Outlier)
生成新的地圖點(三角法)
局部Bundle adjustment(該關(guān)鍵幀和鄰近關(guān)鍵幀,去除Outlier)
驗證關(guān)鍵幀(去除重復幀)
三、閉環(huán)檢測
選取相似幀(bag of words)
檢測閉環(huán)(計算相似變換(3D<->3D,存在尺度漂移,因此是相似變換),RANSAC計算內(nèi)點數(shù))
融合三維點,更新各種圖
圖優(yōu)化(傳導變換矩陣),更新地圖所有點。
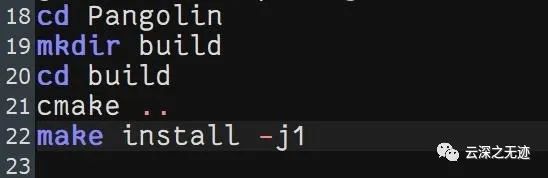
先別看這么高大上,需要做修改的。這個ORB_SLAM2 庫不用Pangolin可視化,而是通過 ROS2 topcis 發(fā)布所有數(shù)據(jù)。
而且這里也需要對TT飛機來一套完整的ROS封裝。下篇文章講封裝,在這之前還需要對X3上面的ROS2進行一個熟悉。
這里使用的編輯器是VSCode,記得密碼是root
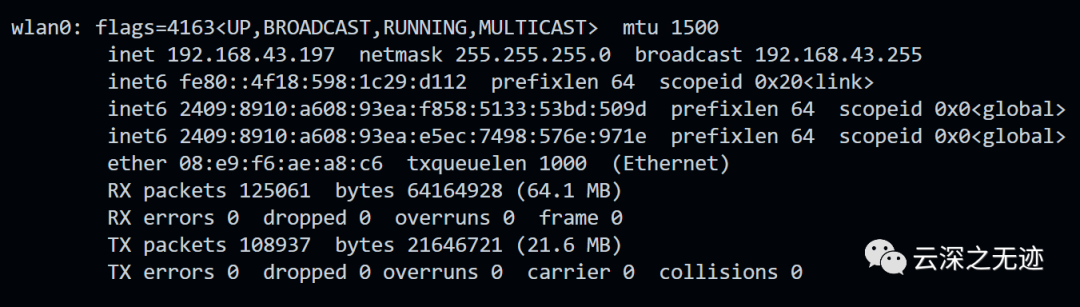
提前看好自己的IP
ssh root@ip

官方的安裝文檔很好了,這里不寫,記得運行前必須加一下,當然了我這里建議是可以一勞永逸的寫好
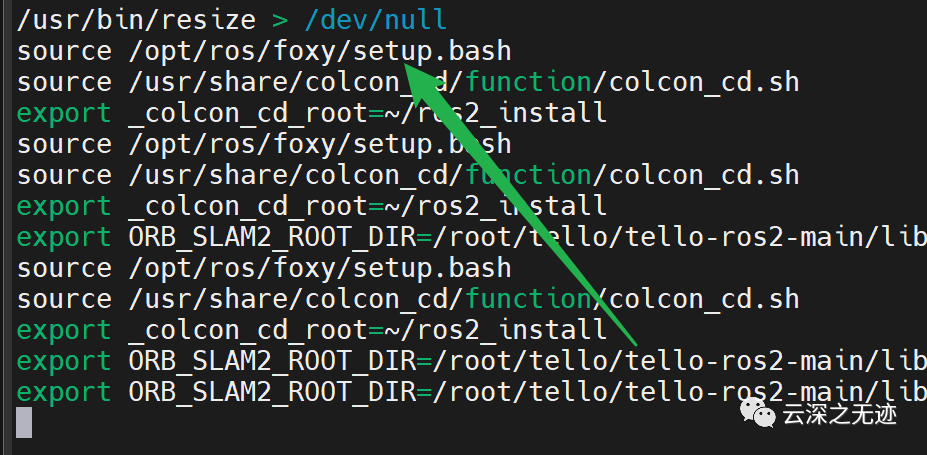
就這樣,下面是我的SLAM庫

但是我也不理解,寫了就好像沒有寫一樣
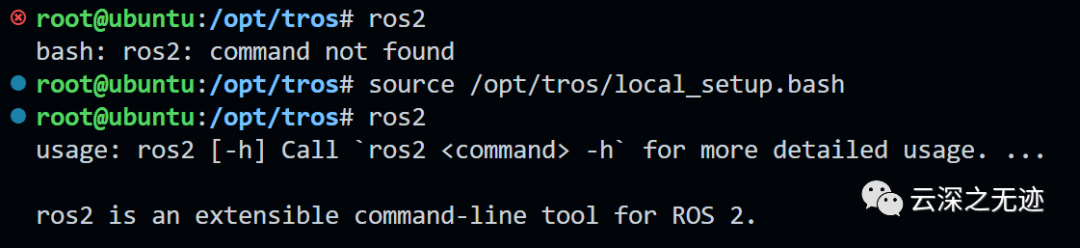
等等我找到了!
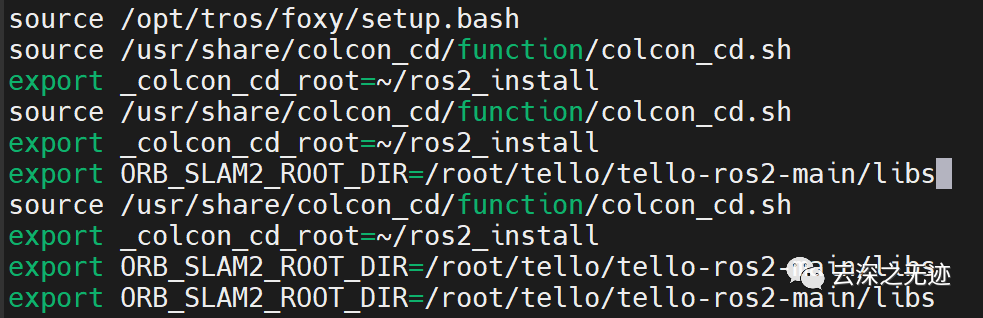
tros。。。地平線自己改了,不過注意后面錄還是不對,沒有foxy了

對了在VSCode里面推薦安裝這些插件

Python的話是安裝這些
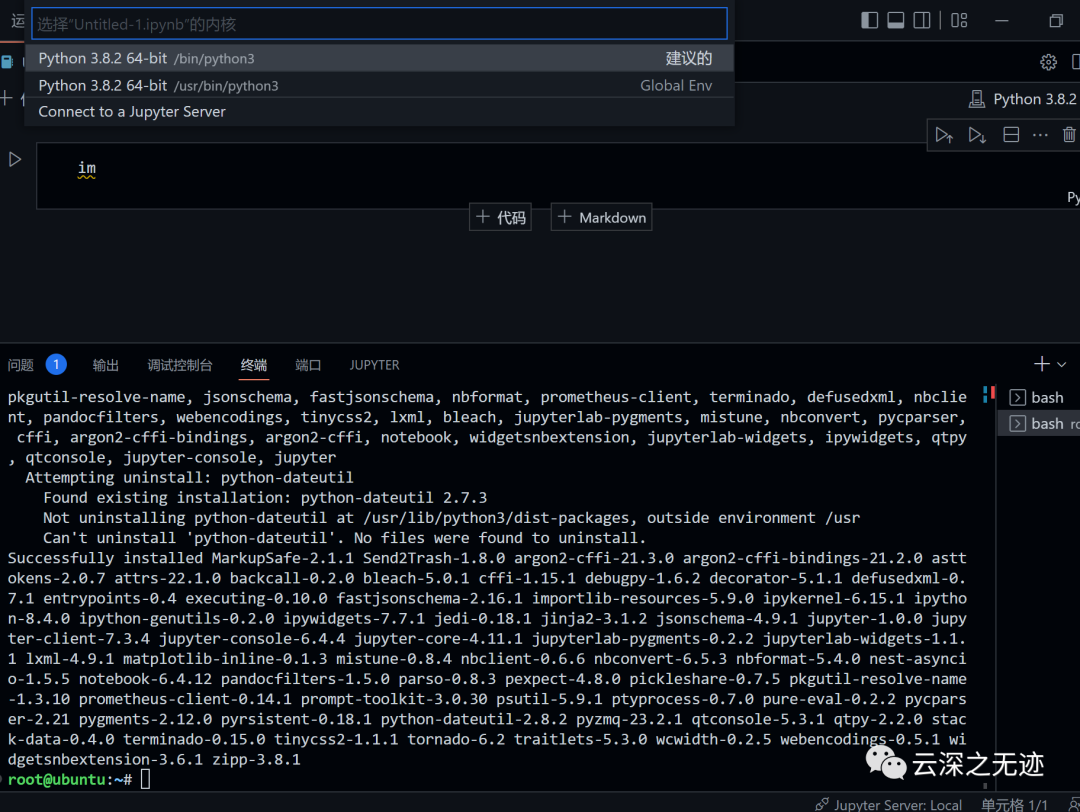
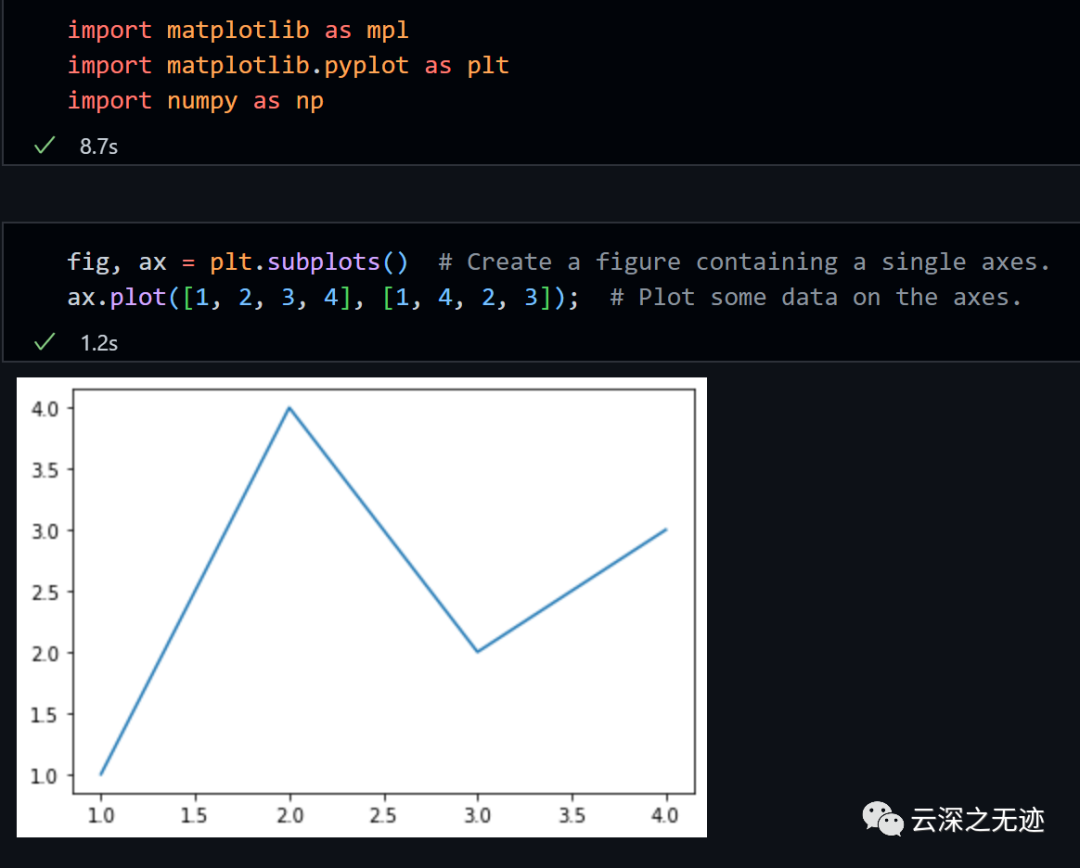
而且可以使用Jupyter,記得pip3 install jupyter

運行的都可以的
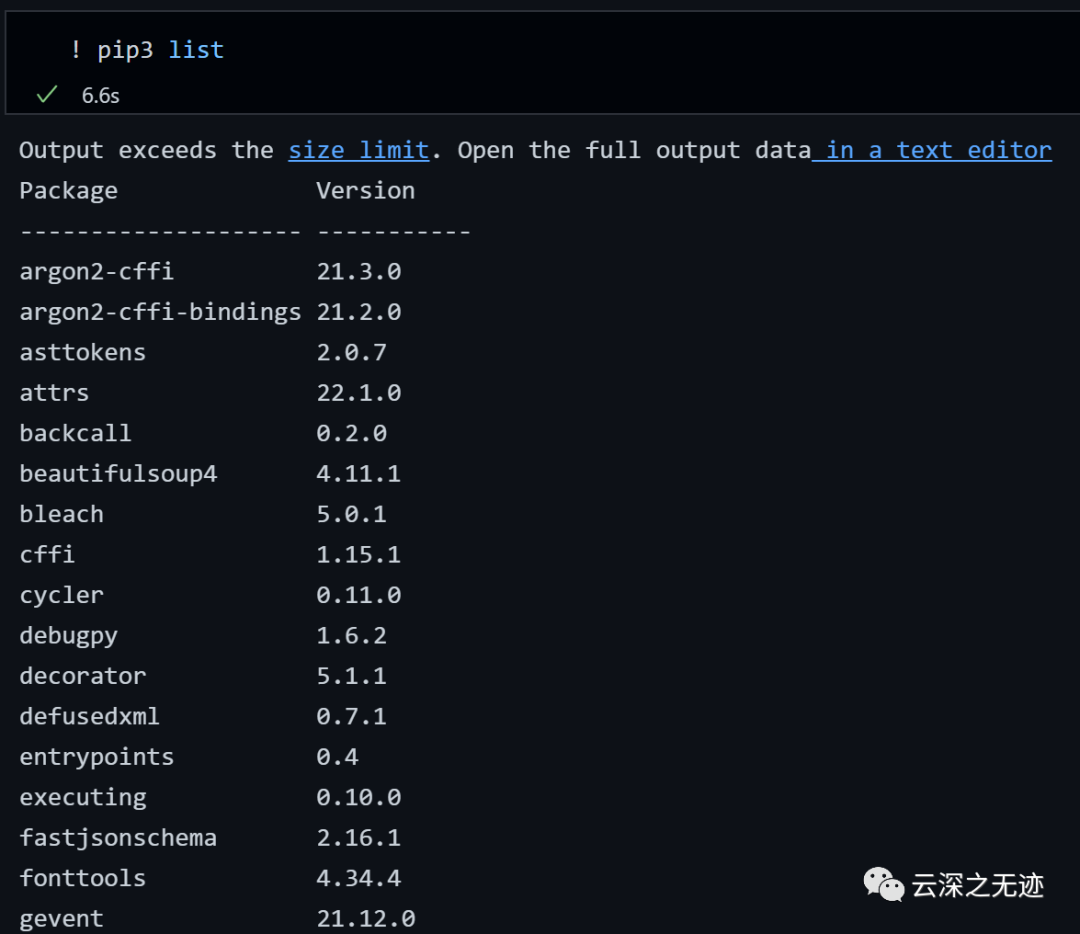
PIP也是可以的
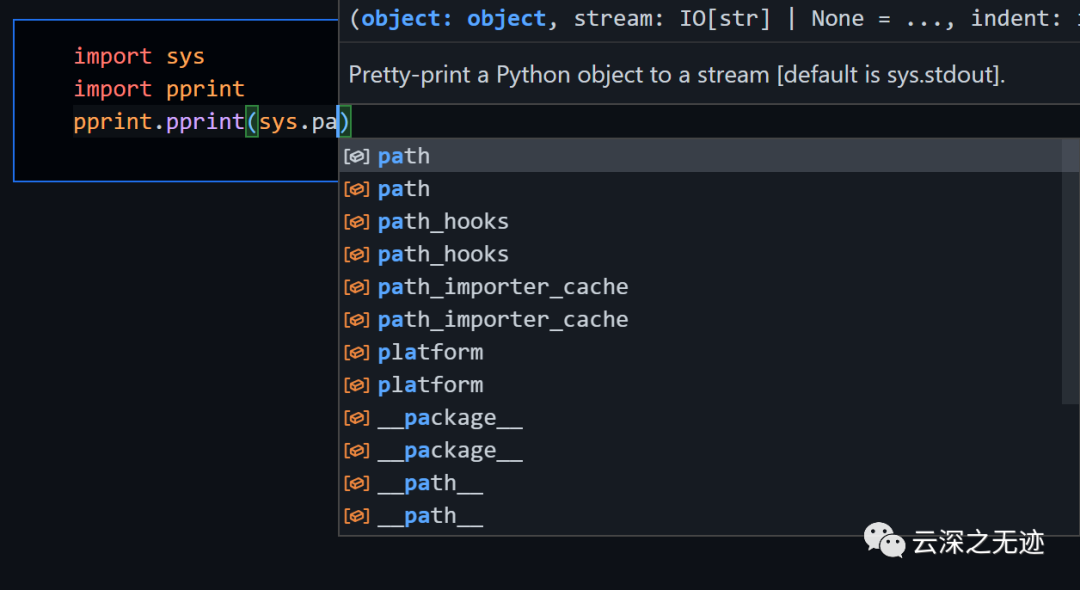
自動補全的速度還行
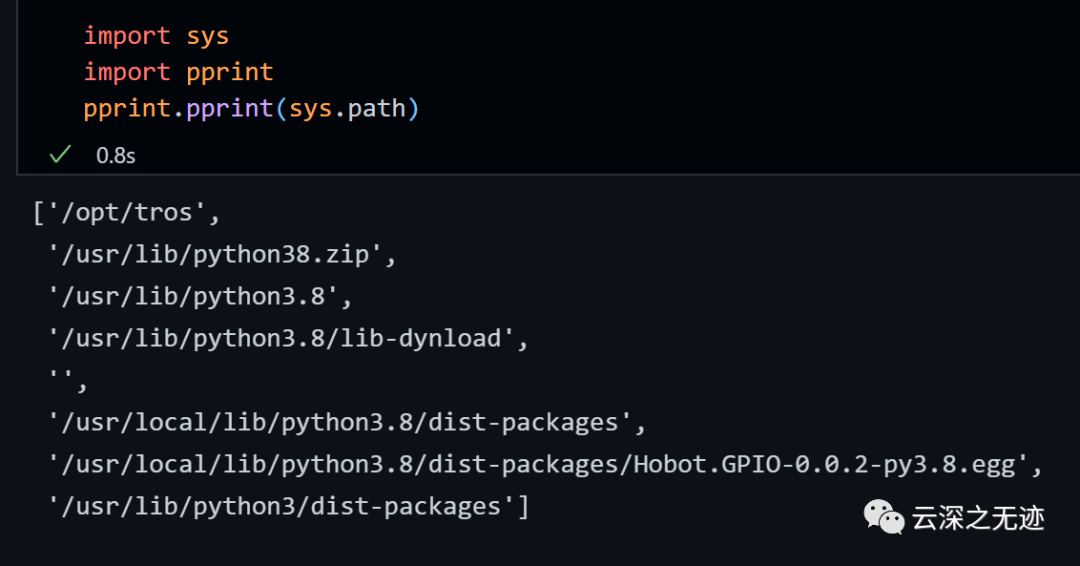
第一個就是我們的tros了
不過這個好像就不管用了
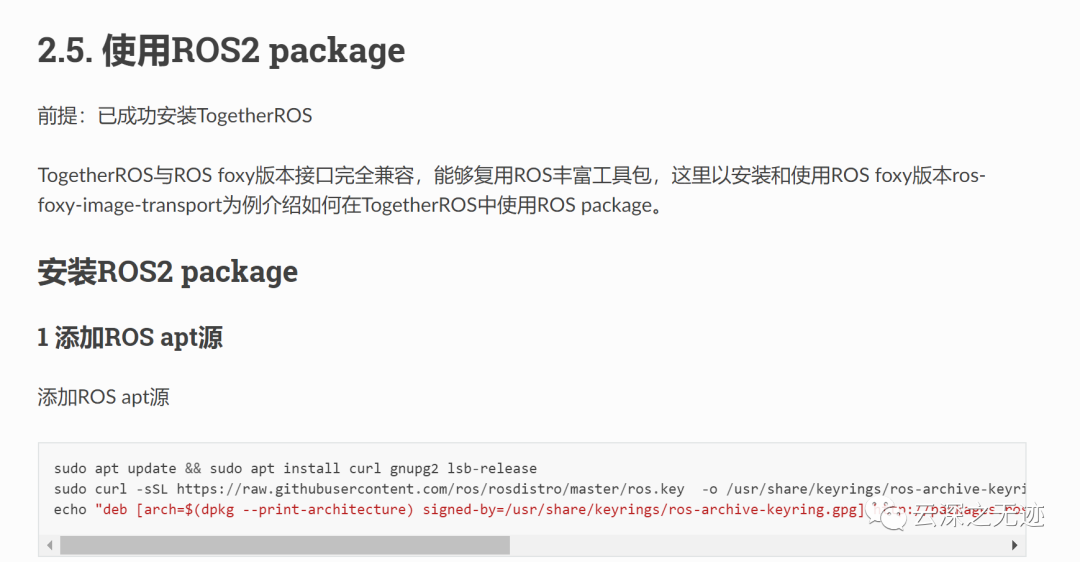
這些說的都對

但是這里指出的是源應(yīng)該是墻外的,所以這里需要全局的安排
接下來試試攝像頭:

應(yīng)該是插入一個攝像頭了,但是看源文件
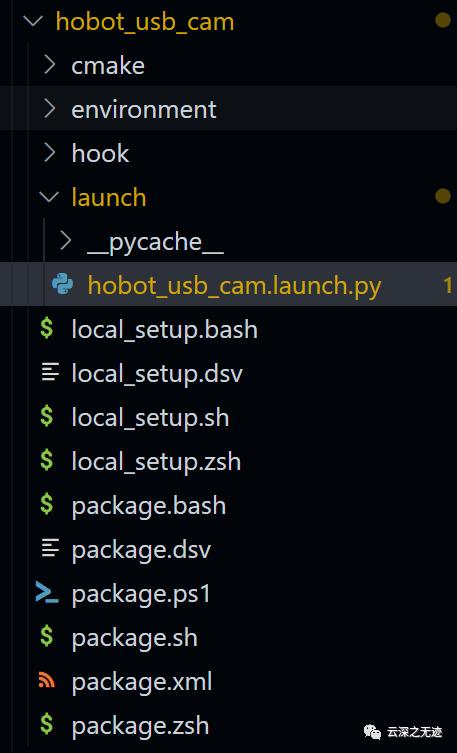
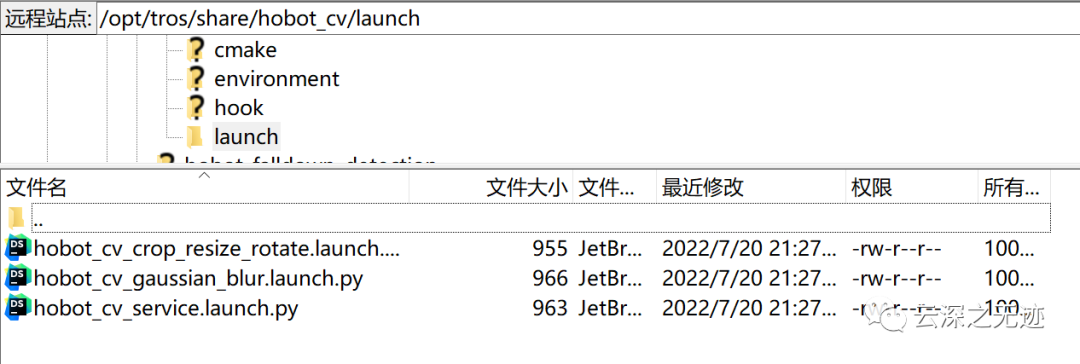
在tos的文件夾里面
/opt/tros/share/hobot_usb_cam/launch/hobot_usb_cam.launch.py
源碼的位置
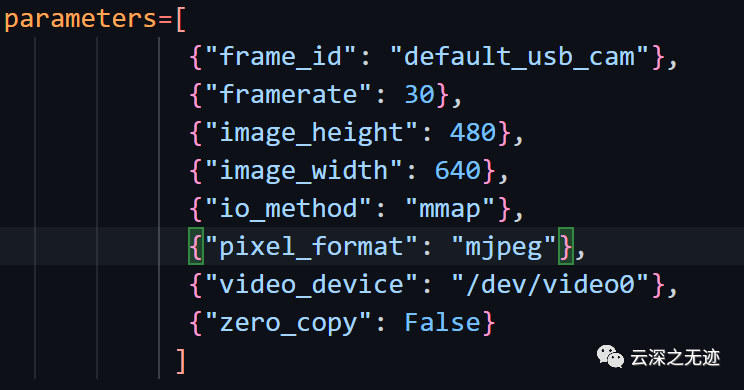
參數(shù)是dev下面的

應(yīng)該是要這個

這里啟動失敗,是不是是因為我的權(quán)限不夠

報錯是沒有???
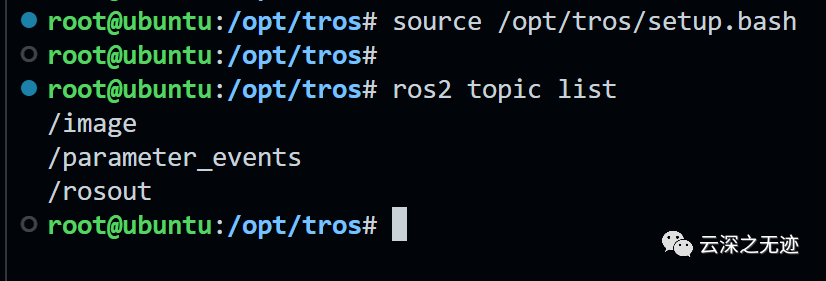
再開一個terimal,看看列表
也知道,節(jié)點都是Python的程序,ros的命令是腳本。
在tros下面的share是存放公開節(jié)點的地方
就像這樣
包括我們的demo也是在這里的
工作溫度:-25°Cto65°C穩(wěn)定工作溫度:20°Cto60°C生產(chǎn)工藝:SMT(ROSH)物距:60CM-150CM解析度:800LW/PH(Center)芯片型號:JX_F37芯片尺寸:1/3最大分辨率:1920*1080像素點大小:2.7um*2.7um最大圖像傳輸速率:30fps(1920*1080)信噪比:36db動態(tài)范圍:79db芯片型號:JX_F37芯片尺寸:1/3最大分辨率:1920*1080像素點大小:2.7um*2.7um最大圖像傳輸速率:30fps(1920*1080)信噪比:36db動態(tài)范圍:79db
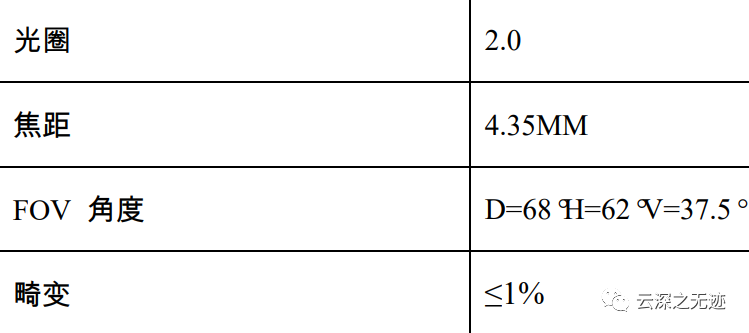

這個就是我們的MIPI的相機
https://developer.horizon.ai/sunrise
售賣的位置,感謝大佬還給了個攝像頭:
害,白嫖笑嘻嘻
source /opt/tros/setup.bash ros2 topic list
我個人是習慣看看話題的情況的
# 配置 TogetherROS 環(huán)境:source /opt/tros/local_setup.bash# launch 方式啟動ros2 launch mipi_cam mipi_cam.launch.py
開啟一個新的終端,開始把攝像頭開啟

攝像頭開啟了一個新的線程
這個就是發(fā)布的信息
可以對比的看
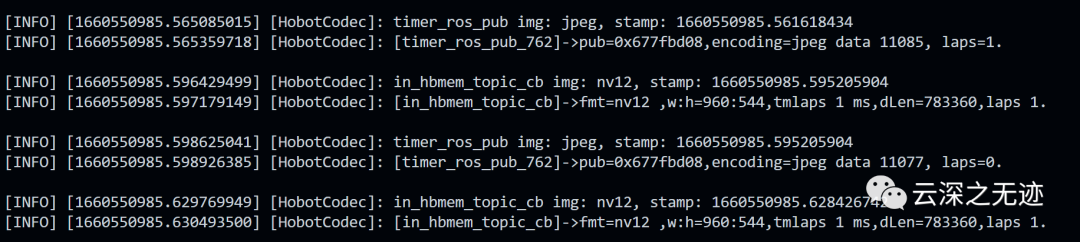
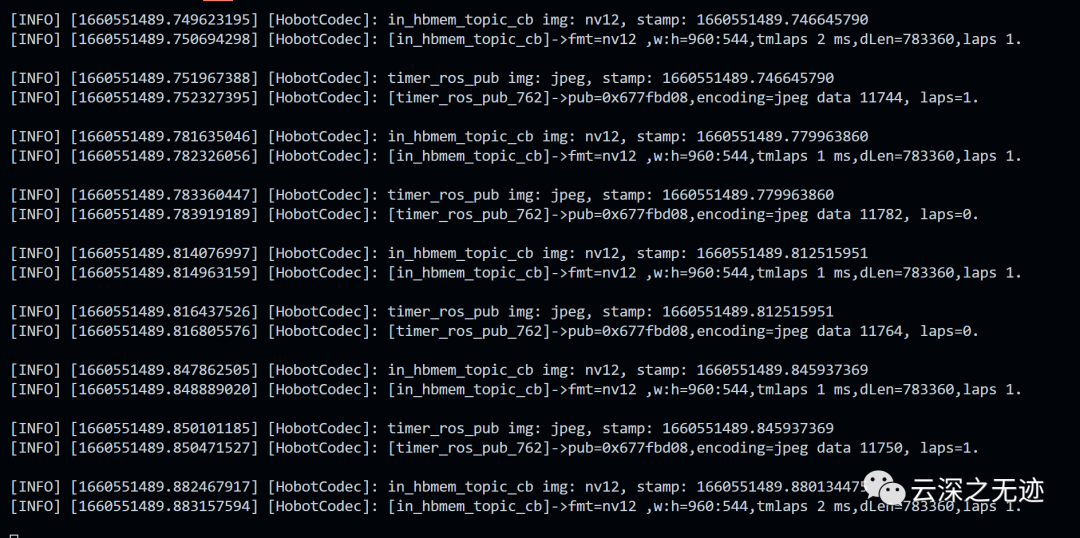
# 一個終端編碼source /opt/tros/local_setup.bashros2 run hobot_codec hobot_codec_republish --ros-args -p channel:=1 -p in_mode:=shared_mem -p in_format:=nv12 -p out_mode:=ros -p out_format:=jpeg -p sub_topic:=/hbmem_img -p pub_topic:=/image_jpeg
我們的數(shù)據(jù)在發(fā)送給屏幕顯示的時候,需要編碼壓縮,所以一個新的終端
這個就是mjpeg的壓縮節(jié)點
命令
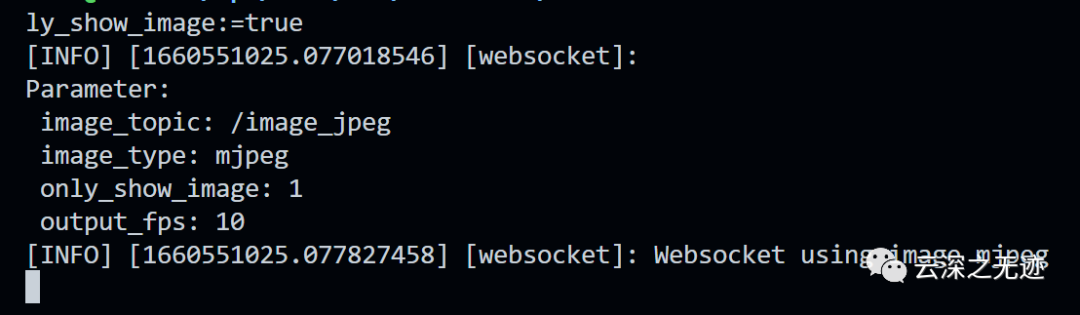
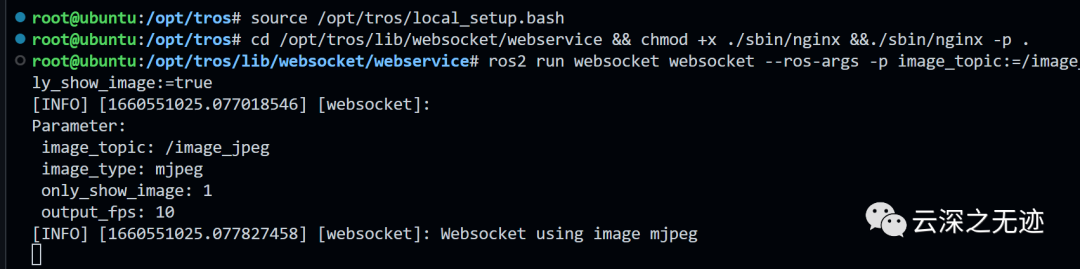
# 再起一個終端source /opt/tros/local_setup.bash# 啟動nginx,nginx只需啟動一次,如前面已啟動過nginx,則無需再次啟動cd /opt/tros/lib/websocket/webservice && chmod +x ./sbin/nginx &&./sbin/nginx -p .# 啟動websocketros2 run websocket websocket --ros-args -p image_topic:=/image_jpeg -p image_type:=mjpeg -p only_show_image:=true
在起一個節(jié)點來把我們的mjpeg的信息通過服務(wù)器發(fā)給瀏覽器

然后再瀏覽器打開就行

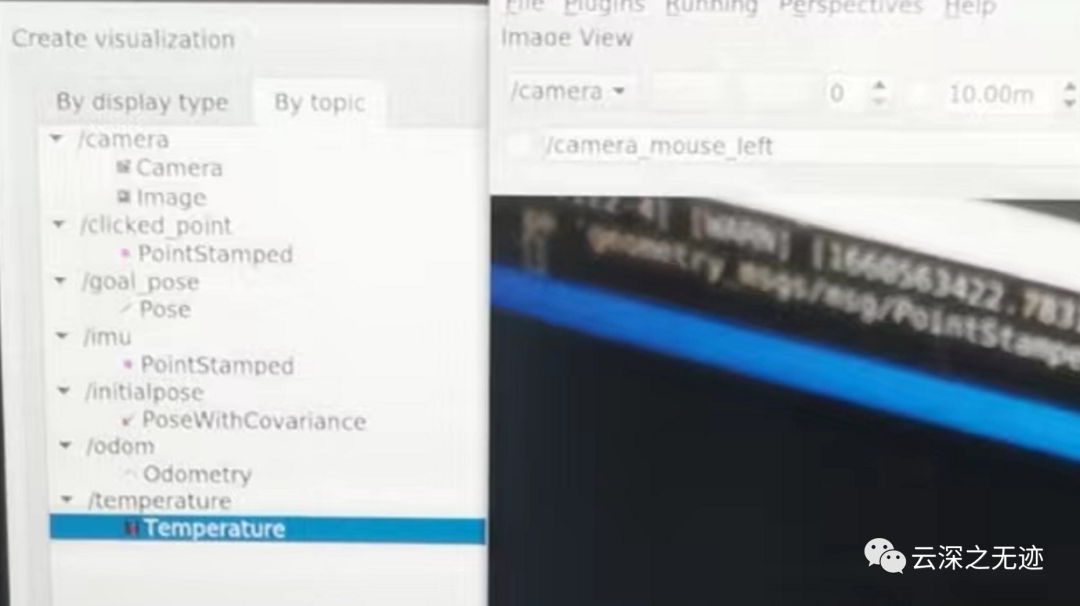
結(jié)果
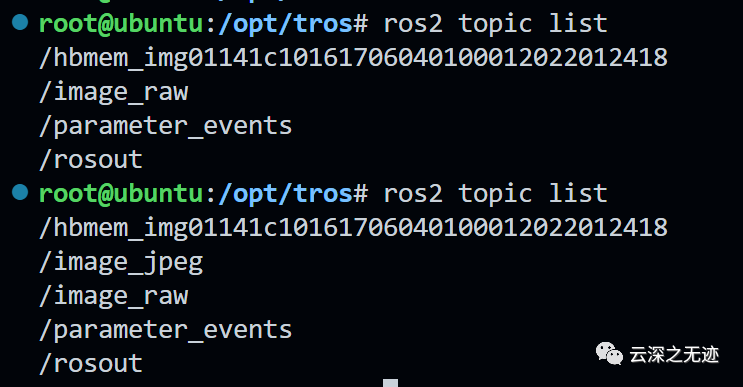
我們可以看到各個節(jié)點的情況

先把硬件打開
把原生的raw數(shù)據(jù)來發(fā)送,并且解碼成mjpeg
接著就是把數(shù)據(jù)轉(zhuǎn)發(fā)到瀏覽器
事已至此我們在繼續(xù)玩
把一個Mac連入我的熱點,打開IP就可以播放(我在吃西紅柿)
這里充分的展示了ROS的方便之處。
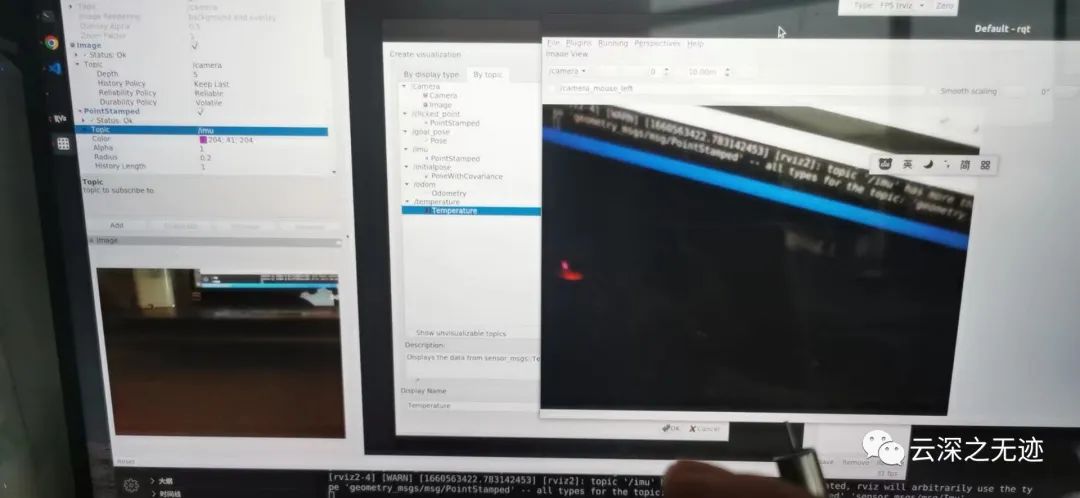
打開我的DELL,里面也有ROS,來個全節(jié)點之間的使用
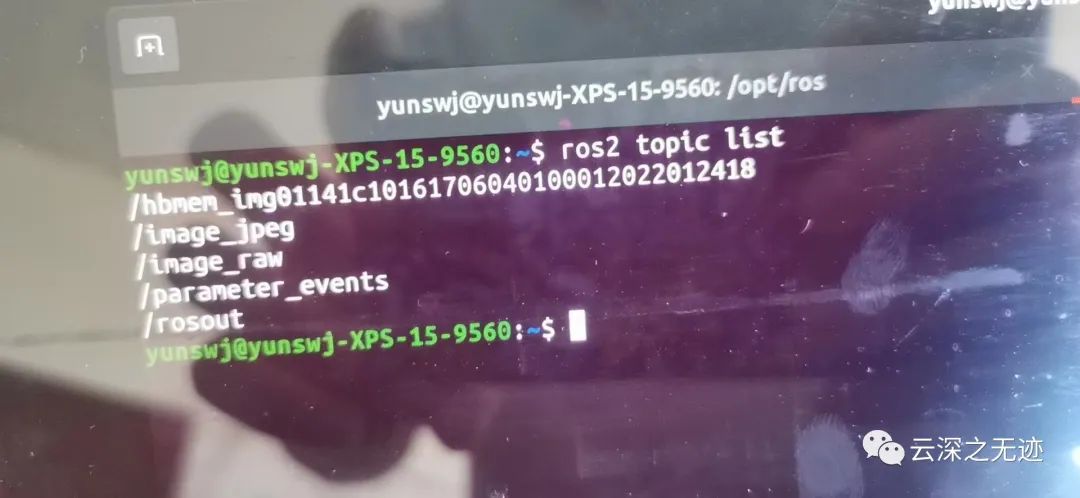
首先是可以讀取發(fā)送的節(jié)點信息
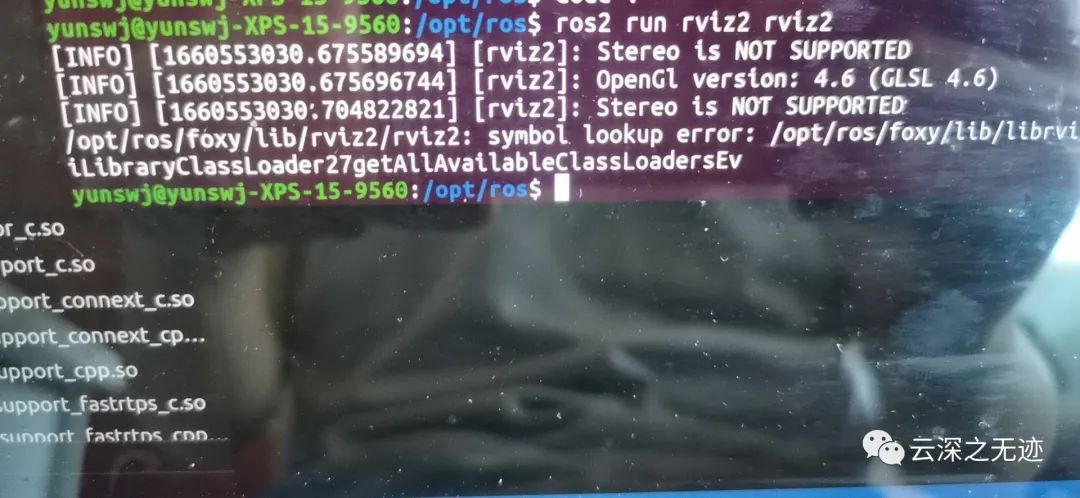
但是rviz2打不開
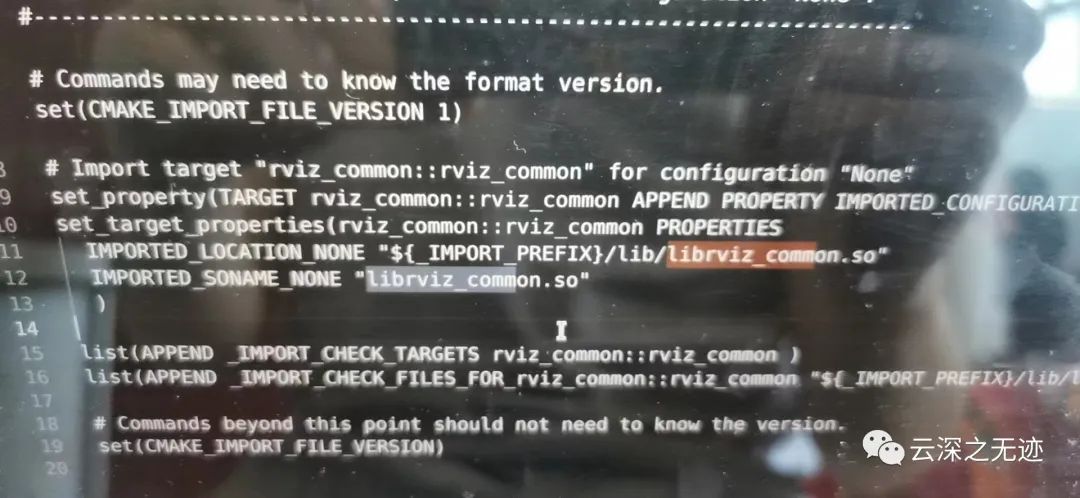
定位到Cmake,是有這個庫的
在這里‘
修了半天也玩不來。
把ROS2卸載了重裝看看怎么樣?(好了)
卸載了重裝了一次,記得最后加一個--fixmissing的東西
板子上面運行這種東西也沒有什么毛病

之后我會給安裝腳本,但sudo就可以的
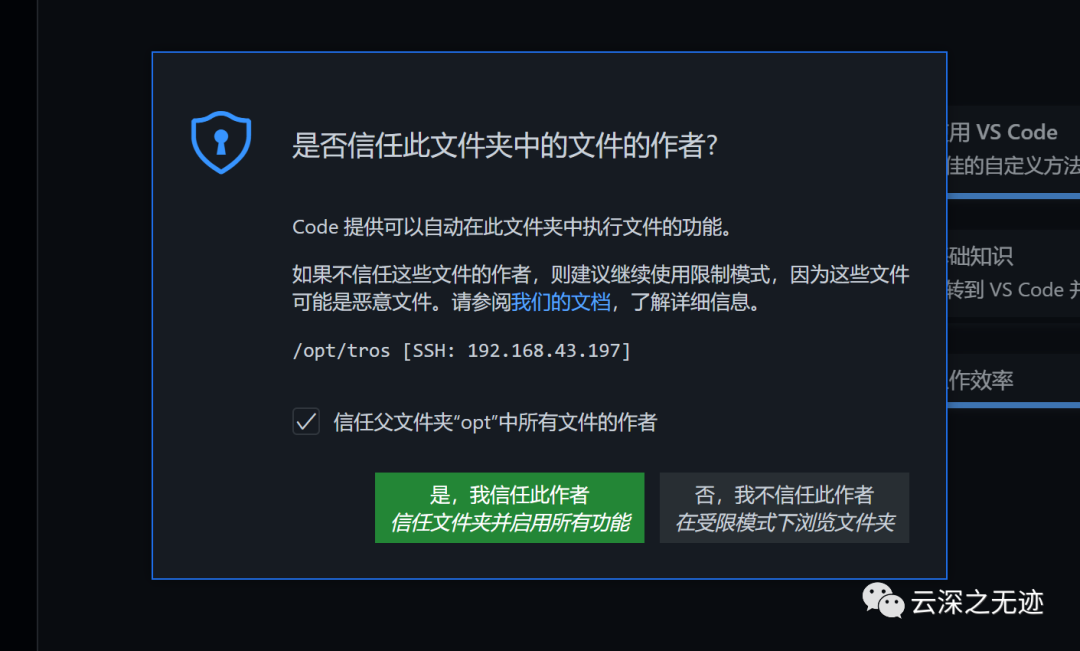
對了在VSCode里面打開新的目錄是使用這個命令

打開后你記得選擇信任
抱歉了,本來想無梯子的,不地不掛了,有的文件有點難搞
這個是編譯的TT ROS包,大概一分鐘吧,DELL 幾秒鐘
救命。。。連個git也沒有
這個是噩夢的開始,慢不說,內(nèi)存還爆了
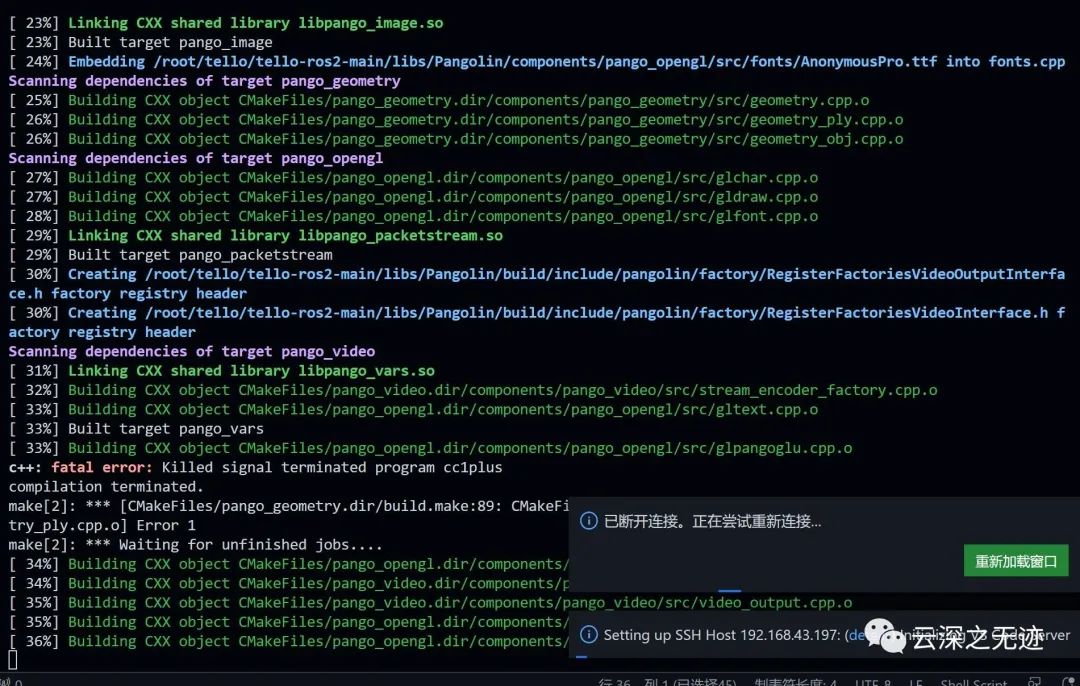
看不懂?
就是板子編譯東西的時候,沒內(nèi)存維持正常運行就宕機了
兩位兄臺的建議很好,但是太慢了,我不準備在X3上面編譯了,我試了腳本為1,但是好慢。
目前TT ROS搞好了,就差SLAM了
-
接口
+關(guān)注
關(guān)注
33文章
8612瀏覽量
151275 -
三維定位
+關(guān)注
關(guān)注
1文章
8瀏覽量
8366 -
開源代碼
+關(guān)注
關(guān)注
0文章
36瀏覽量
2978
原文標題:X3派+大疆無人機-SLAM單目建圖.上
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
三維設(shè)計應(yīng)用案例
計算機視覺中的三維重構(gòu)建模
基于雙目立體視覺的三維拼接和融合方法
基于VSLAM的移動機器人三維定位與地圖構(gòu)建

改進ORB的特征點匹配算法
物聯(lián)網(wǎng)空間劃分的三維定位算法
Taylor算法在TDOA三維定位應(yīng)用中的相關(guān)研究
一種可在動態(tài)環(huán)境下構(gòu)建語義地圖的算法
基于實時特征檢測等的AR系統(tǒng)三維注冊方法
基于雙目視覺立體匹配的三維地圖構(gòu)建方法
工程實踐中VINS與ORB-SLAM的優(yōu)劣分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論