") 安全是AGV運行的前提
安全是AGV運行的前提
安全是AGV運行的前提。
根據(jù)定義,雖然自動導航車(AGV)設(shè)計為自主運行,但它們通常需要與人合作,因此需要以安全、可預測的方式移動和反應。為了保障這一點,所有自動導航車都必須遵守一些安全規(guī)則和AGV安全標準。
安全水平
控制AGV運行的系統(tǒng)被歸類為控制系統(tǒng),因此安全水平會按照其性能等級(簡稱PL)來定義。PL和它的姐妹分類 – 安全完整性等級(簡稱SIL),都是用于衡量控制系統(tǒng)安全功能提供的風險降低水平。 國際電工委員會(簡稱IEC)的標準IEC 61508使用,按照兩大類要求定義安全完整性等級(SIL):硬件安全完整性和系統(tǒng)安全完整性。一個設(shè)備或系統(tǒng)必須滿足上述兩大類別要求以達到特定的SIL。對于將會連續(xù)運行的系統(tǒng),SIL和PL都被定義為每小時發(fā)生危險故障的概率范圍,而且它們是重疊的。 同時,EN ISO 13849-2015標準將性能級別定義為從最低級別PLa到最嚴格的PLe,這是對不同安全部件(例如:車輛安全激光掃描儀)的要求。AGV制造商被要求達到的行業(yè)標準是PLd級安全編程。具體來說,這種安全水平確保車輛在發(fā)生單一故障時能繼續(xù)運行,例如:采用兩個冗余通道。在故障同步累積的情況下,仍然會發(fā)生安全功能的喪失,但發(fā)生這種情況的幾率極低。
避免碰撞
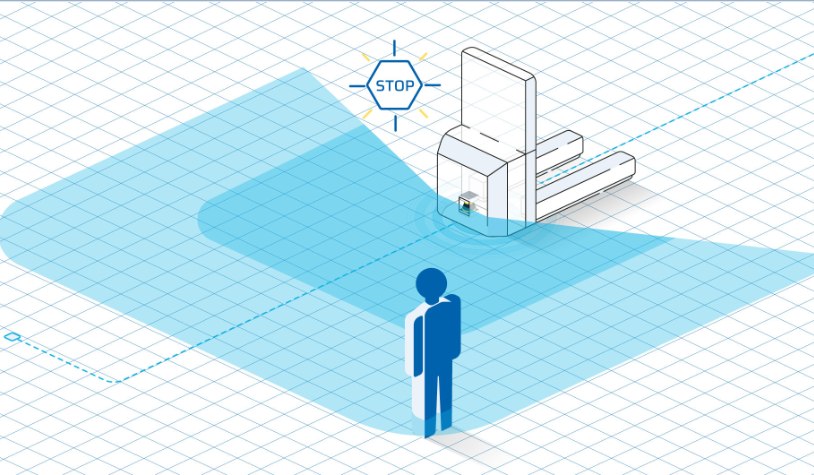
避免碰撞的能力,顯然是安全性的組成部分之一,無論是與人類或無生命的物體碰撞。自動導航車(AGV)采用的一個常見安全功能是設(shè)置二維安全激光掃描儀(基于LiDAR),但這些并非強制性規(guī)格。舉例,物理保險杠(如同您的汽車般)是另一種選擇,但是,為了保證車輛能在撞到障礙物之前停下來,這些保險杠的大小必須與車輛能達到的最大速度成正比。對于任何不以極低速度行駛的車輛,意味著需要更大的保險杠,因此需要更多的空間來運行。 如果使用二維掃描儀(一般情況都會采用),確保工人安全的唯一強制性要求,是設(shè)置一個水平方向的掃描儀,其定位是為了檢測靠近地面的障礙物。許多公司使用不同掃描儀來完成不同的工作,比如在車輛高處增加一個掃描儀,用于準確的車輛定位,以及不同的腳踝高度掃描儀以確保車輛安全。
避開障礙
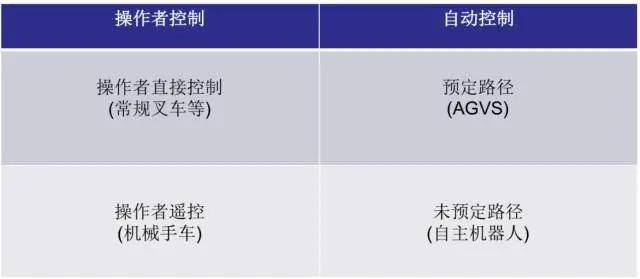
當情況涉及到處理車輛路徑的障礙物時,自動導航車(AGV)和自主移動機器人(AMR)有兩種基本的操作模式。這些模式可概括為"路徑跟隨 "或"障礙避免"。 路徑跟隨涉及到車輛按照預先定義的路線行駛,路線可以是地面或地板下的一條物理線,也可以是一條虛擬路徑。當車輛到達阻礙其路徑的障礙物時,它只需停下來等待障礙物被移除。這種功能有時也被簡單稱為 “碰撞避免"。 相比之下,障礙避免是一種更流暢、更積極的方法。在這種情況下,如果有東西擋住車輛的路線,AGV或AMR將試圖以動態(tài)模式繞過這個物體,規(guī)劃一條替代路徑完成運行,同時盡可能最少程度偏離其主要路線,并盡快返回到這個路徑。 這兩種方法都有優(yōu)點和缺點。一般來說,大部分時間AMR和清潔機器人等產(chǎn)品會采用障礙避免功能,而在工業(yè)應用中運行的AGV通常使用路徑跟隨方法效率最高, 也許這聽上去有點反常。然而,采用這種方法的同時,工作人員必須接受培訓,以注意到停止的車輛并及時清除阻礙物。如有任何疑問,請與您的自動導航車合作伙伴討論這個問題。
關(guān)于BlueBoticsBlueBotics公司是自然特征導航的參考指標,致力于幫助客戶公司應對車輛自動化的復雜挑戰(zhàn)。憑借二十年的豐富行業(yè)經(jīng)驗,BlueBotics公司提供客戶所需的自主導航技術(shù)(ANT)和專家支援,幫助客戶公司將其自動導航車、自動叉車和移動機器人成功推向市場。時至今日,全球已有超過3000輛由ANT驅(qū)動的車型在運行中。 BlueBotics是颯派集團(ZAPI GROUP)子公司。
審核編輯 :李倩
-
移動機器人
+關(guān)注
關(guān)注
2文章
762瀏覽量
33573 -
AGV
+關(guān)注
關(guān)注
27文章
1308瀏覽量
41096
原文標題:遵循AGV安全之路
文章出處:【微信號:robotinside2014,微信公眾號:移動機器人產(chǎn)業(yè)聯(lián)盟】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
干貨好文 AGV小車安全操作注意事項


鳳凰動力AGV舵輪安裝與調(diào)試
一文讀懂AGV安全系統(tǒng)是如何工作的?

做到這三項安全要求,再也不用擔心AGV出問題了
鳳凰動力舵輪驅(qū)動輪的穩(wěn)定性如何影響AGV的運行效率和穩(wěn)定性

RFID工業(yè)級讀寫器如何助力AGV小車智能定位的?
智慧物流:AGV小車在智慧倉儲物流中如何運行的呢?
agv叉車怎么運行的?速度受哪些因素影響?有哪些不確定因素?

AGV選型要點及步驟,保證企業(yè)選擇的AGV小車更實用

AGV小車使用避障雷達
什么是物流agv叉車?操作簡單嗎?使用時需要注意什么?

安全是最大的豪華!星紀元ET成功挑戰(zhàn)31.9米空中墜落試驗

地面平整度影響物流agv叉車運行嗎?怎么檢查地面?收藏!

這才是正確使用和保養(yǎng)AGV叉車的方法,99%的人都錯了






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論