") 一文簡(jiǎn)析OpenCV中的直線擬合方法
一文簡(jiǎn)析OpenCV中的直線擬合方法
直線擬合原理
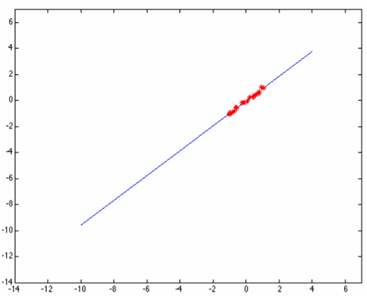
給出多個(gè)點(diǎn),然后根據(jù)這些點(diǎn)擬合出一條直線,這個(gè)最常見(jiàn)的算法是多約束方程的最小二乘擬合,如下圖所示:
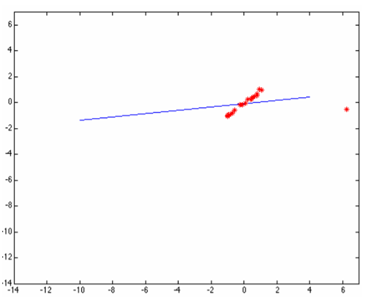
但是當(dāng)這些點(diǎn)當(dāng)中有一個(gè)或者幾個(gè)離群點(diǎn)(outlier)時(shí)候,最小二乘擬合出來(lái)的直線就直接翻車(chē)成這樣了:
原因是最小二乘無(wú)法在估算擬合的時(shí)候剔除或者降低離群點(diǎn)的影響,于是一個(gè)聰明的家伙出現(xiàn)了,提出了基于權(quán)重的最小二乘擬合估算方法,這樣就避免了翻車(chē)。根據(jù)高斯分布,離群點(diǎn)權(quán)重應(yīng)該盡可能的小,這樣就可以降低它的影響,OpenCV中的直線擬合就是就權(quán)重最小二乘完成的,在生成權(quán)重時(shí)候OpenCV支持幾種不同的距離計(jì)算方法,分別如下:
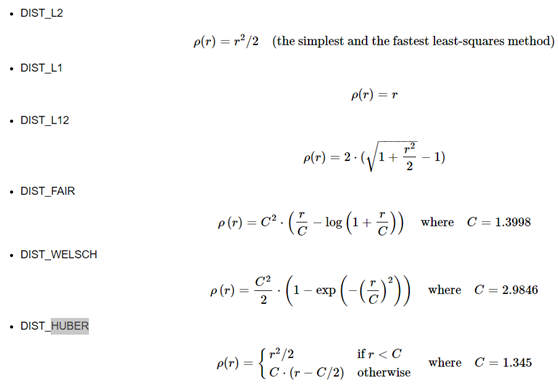
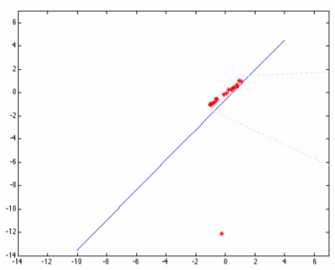
其中DIST_L2是最原始的最小二乘,最容易翻車(chē)的一種擬合方式,雖然速度快點(diǎn)。然后用基于權(quán)重的最小二乘估算擬合結(jié)果如下:
函數(shù)與實(shí)現(xiàn)源碼分析
OpenCV中直線擬合函數(shù)支持上述六種距離計(jì)算方式,函數(shù)與參數(shù)解釋如下:
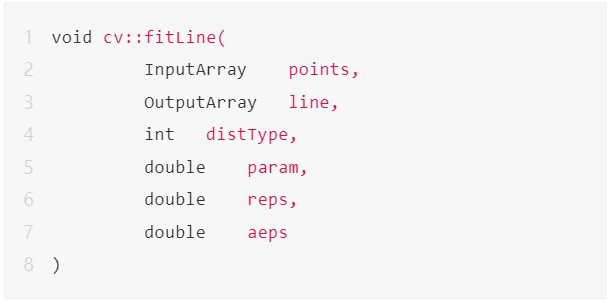
points是輸入點(diǎn)集合
line是輸出的擬合參數(shù),支持2D與3D
distType是選擇距離計(jì)算方式
param 是某些距離計(jì)算時(shí)生成權(quán)重需要的參數(shù)
reps 是前后兩次原點(diǎn)到直線的距離差值,可以看成擬合精度高低
aeps是前后兩次角度差值,表示的是擬合精度
六種權(quán)重的計(jì)算更新實(shí)現(xiàn)如下:
staticvoidweightL1(float*d,intcount,float*w) { inti; for(i=0;i
擬合計(jì)算的代碼實(shí)現(xiàn):
staticvoidfitLine2D_wods(constPoint2f*points,intcount,float*weights,float*line) { CV_Assert(count>0); doublex=0,y=0,x2=0,y2=0,xy=0,w=0; doubledx2,dy2,dxy; inti; floatt; //Calculatingtheaverageofxandy... if(weights==0) { for(i=0;i
案例:直線擬合
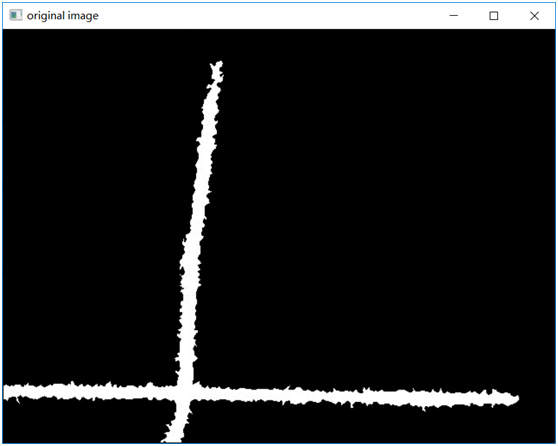
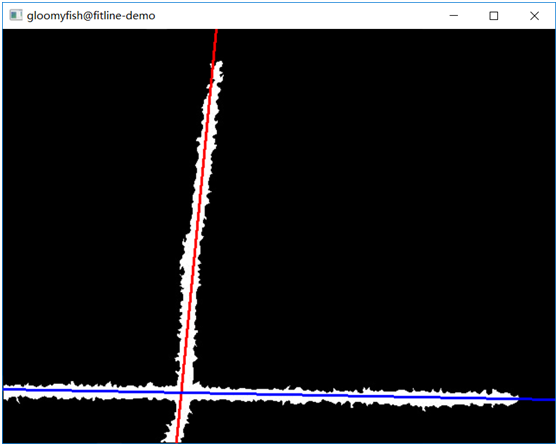
有如下的原圖:
通過(guò)OpenCV的距離變換,骨架提取,然后再直線擬合,使用DIST_L1得到的結(jié)果如下:
審核編輯:劉清
-
算法
+關(guān)注
關(guān)注
23文章
4615瀏覽量
93025 -
最小二乘法
+關(guān)注
關(guān)注
0文章
22瀏覽量
8461 -
OpenCV
+關(guān)注
關(guān)注
31文章
635瀏覽量
41380
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論