") 激光雷達(dá)“3.0時(shí)代”來(lái)臨了嗎?
激光雷達(dá)“3.0時(shí)代”來(lái)臨了嗎?
2021年以來(lái),隨著高性能車(chē)規(guī)級(jí)激光雷達(dá)在成本、性能、可靠性等方面基本成熟,激光雷達(dá)的市場(chǎng)認(rèn)知和應(yīng)用規(guī)模迎來(lái)新一輪爆發(fā)。
如何定義激光雷達(dá)“3.0時(shí)代”?
激光雷達(dá)賽道一直充滿迷霧,不同技術(shù)路徑各有優(yōu)勢(shì)劣勢(shì),如何破局而出?
激光雷達(dá)的終局是什么,是成本、性能和穩(wěn)定性的極致平衡嗎?
探維科技CEO王世瑋受邀參加數(shù)字科技百日談,暢談他的看法。
主題:激光雷達(dá)“3.0時(shí)代”來(lái)臨了嗎?
人物:探維科技CEO王世瑋
激光雷達(dá)技術(shù)從國(guó)內(nèi)外的研究到應(yīng)用,有演進(jìn)的脈絡(luò)和動(dòng)向,請(qǐng)您幫助大家理解和刻畫(huà)一下所謂的1.0、2.0、3.0。
借此機(jī)會(huì),我們把激光雷達(dá)3.0的概念給大家做一個(gè)介紹。首先,激光的飛行時(shí)間測(cè)距技術(shù)(TOF)是光學(xué)領(lǐng)域比較常見(jiàn)、基礎(chǔ)的技術(shù)方案。最早阿波羅飛船登月,測(cè)量地球到月球的距離,就是通過(guò)計(jì)算光在太空中飛行的時(shí)間得到精確的距離信息,當(dāng)時(shí)還不能叫做激光雷達(dá)。
我們所看到的激光雷達(dá)產(chǎn)品的1.0,就是大家經(jīng)常說(shuō)的機(jī)械式激光雷達(dá)。最早我們看到的機(jī)械式激光雷達(dá)安裝在自動(dòng)駕駛測(cè)試車(chē)的車(chē)頂,做360度環(huán)視,一邊旋轉(zhuǎn)掃描,一邊采集點(diǎn)云,承擔(dān)無(wú)人駕駛車(chē)的感知功能,性能很好,測(cè)距很遠(yuǎn),3D感知的場(chǎng)景非常清晰,開(kāi)創(chuàng)了激光雷達(dá)在自動(dòng)駕駛系統(tǒng)和車(chē)載端的應(yīng)用,這是機(jī)械式激光雷達(dá)的歷史使命。
所謂2.0技術(shù),就是大家經(jīng)常說(shuō)的車(chē)規(guī)級(jí)激光雷達(dá),隨著自動(dòng)駕駛技術(shù)從ADAS升級(jí)到L2+,甚至L3、L4,激光雷達(dá)想要上量產(chǎn)的乘用車(chē)和商務(wù)車(chē),所面對(duì)的核心問(wèn)題就是要走向固態(tài)化、低成本和車(chē)規(guī)級(jí)。目前國(guó)內(nèi)外已經(jīng)發(fā)布了一些搭載激光雷達(dá)的量產(chǎn)乘用車(chē)車(chē)型,激光雷達(dá)開(kāi)始走入消費(fèi)者的視野,為車(chē)輛提供高級(jí)輔助駕駛所需的感知功能。
我們總結(jié)歸納激光雷達(dá)2.0的版本,跟1.0最大的差別就是從機(jī)械式走向了固態(tài),或者說(shuō)混合固態(tài),其中包含很多技術(shù)路線。技術(shù)路線雖然不同,但都是為了量產(chǎn),為了能夠滿足車(chē)規(guī)級(jí)的要求。我們看行業(yè)的發(fā)展趨勢(shì),一個(gè)非常明確的剛需就是安全。激光雷達(dá)滿足車(chē)規(guī)級(jí)的要求以后,一定要保證自動(dòng)駕駛系統(tǒng)從感知層再到?jīng)Q策層都能夠更加安全可靠,在更多的場(chǎng)景下,讓自動(dòng)駕駛系統(tǒng)去發(fā)揮它的無(wú)人駕駛功能。
在傳感器端如何更好地提升感知性能,就是我們?cè)谕茝V的概念,或者說(shuō)是我們對(duì)未來(lái)的判斷。后面激光雷達(dá)一定是和更多的傳感器去融合,圖像加上激光點(diǎn)云,能夠以光學(xué)和基于硬件的形式去做到高精度的空間對(duì)準(zhǔn),高精度的時(shí)間同步,通過(guò)前融合的方式把攝像頭和激光雷達(dá)的數(shù)據(jù),真正地整合到一起來(lái)。這就是我們看到的未來(lái)整個(gè)感知層技術(shù)演進(jìn)方向和趨勢(shì)。
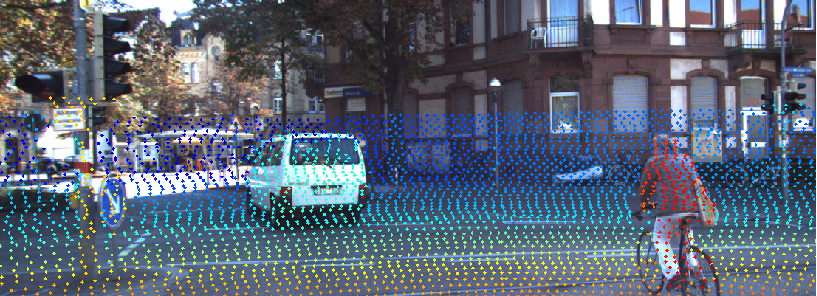
所以我們激光雷達(dá)3.0的概念,就是硬件級(jí)圖像前融合的固態(tài)激光雷達(dá),能夠同時(shí)給用戶、給算法層去輸出具有高清細(xì)節(jié)的圖像信息,同時(shí)也能給出非常高精度的距離3D感知的信息,這個(gè)就是我們所定義的激光雷達(dá)3.0的概念和技術(shù)的方向。
在激光雷達(dá)上車(chē)的過(guò)程中,客戶現(xiàn)階段對(duì)于激光雷達(dá)有什么樣具體的需求?在上車(chē)的過(guò)程當(dāng)中到底有什么樣的痛點(diǎn)?在這個(gè)過(guò)程當(dāng)中探維這樣的創(chuàng)業(yè)公司有什么樣的機(jī)遇?
這個(gè)問(wèn)題還挺大,我覺(jué)得這個(gè)問(wèn)題還是得從激光雷達(dá)2.0車(chē)規(guī)量產(chǎn)的應(yīng)用普及開(kāi)始聊。因?yàn)锳DAS系統(tǒng),或者說(shuō)是L2+、L3的自動(dòng)駕駛系統(tǒng),可能會(huì)遇到一些事故的隱患和出現(xiàn)一些意外的情況,總結(jié)下來(lái)看,目前出現(xiàn)的大部分場(chǎng)景和失效的模式,還沒(méi)有因?yàn)榧す饫走_(dá)的原因?qū)е碌摹=^大部分的失效,還是攝像頭加上毫米波的感知方案在一些corner case下遇到意外情況導(dǎo)致。
目前整個(gè)行業(yè)內(nèi),激光雷達(dá)量產(chǎn)車(chē)型進(jìn)ADAS系統(tǒng),是一個(gè)逐漸普及的過(guò)程。可以看到很多車(chē)企都已經(jīng)有了激光雷達(dá)車(chē)型的計(jì)劃,但是目前搭載激光雷達(dá)自動(dòng)駕駛系統(tǒng)的車(chē)型普及率還不是特別高。大家可能還在行業(yè)內(nèi)共同探討激光雷達(dá)究竟上車(chē)要發(fā)揮什么作用,如何跟攝像頭、毫米波這樣相對(duì)比較成熟的感知傳感器去配合、融合。
所以這個(gè)問(wèn)題既涉及到激光雷達(dá)上車(chē)的大趨勢(shì),同時(shí)也涉及到不同傳感器之間,如何去更好地互相配合,能更完善地、更完整性地保證自動(dòng)駕駛系統(tǒng)在更多的場(chǎng)景下,做到極致的安全體驗(yàn)。我們?cè)诩す饫走_(dá)2.0版本的階段下,給很多車(chē)載的乘用車(chē)客戶去提供更低成本、更加可靠,環(huán)境穩(wěn)定性更好的固態(tài)激光雷達(dá)產(chǎn)品,進(jìn)一步推動(dòng)在當(dāng)下的ADAS系統(tǒng)中,車(chē)企能夠有更多更好的傳感器選擇。
我們所看到的這些corner case的共同點(diǎn)基本都是屬于道路上遇到靜態(tài)物體的情況,這是毫米波沒(méi)有辦法解決的。同時(shí),如果障礙物或者說(shuō)一些特殊的車(chē)輛,它在圖像當(dāng)中所展現(xiàn)的形態(tài)并不是常見(jiàn)的障礙物,圖像識(shí)別失效的風(fēng)險(xiǎn)也非常大。所以類(lèi)似這樣的場(chǎng)景,對(duì)于攝像頭加毫米波的感知系統(tǒng)而言,失效的風(fēng)險(xiǎn)是非常高的。

然而,激光雷達(dá)最擅長(zhǎng)的就是對(duì)于異形或大型物體的感知,哪怕它是靜態(tài)的,激光雷達(dá)點(diǎn)云都是可以在相當(dāng)遠(yuǎn)的距離下,甚至150米、200米外就能夠做到檢測(cè)和識(shí)別。
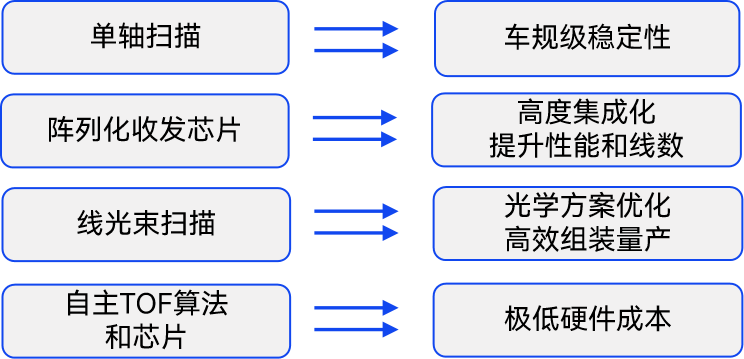
當(dāng)然目前激光雷達(dá)在上車(chē)的過(guò)程當(dāng)中也遇到一些困難和挑戰(zhàn),我覺(jué)得主要來(lái)自于兩個(gè)方面,一方面是激光雷達(dá)的成本一定要達(dá)到入門(mén)型的,或者大眾型的車(chē)型能接受的價(jià)格。另外一方面,在傳感器融合的層面,不要讓不同的傳感器互相掣肘。所以探維做的事情一方面在激光雷達(dá)的方案上,充分考慮低成本和車(chē)規(guī)級(jí)的要求。我們的ALS方案,非常適合規(guī)模化的車(chē)規(guī)級(jí)量產(chǎn),而且最終的目標(biāo)成本,能夠做到接近千元級(jí)的水平,滿足未來(lái)自動(dòng)駕駛車(chē)型對(duì)于激光雷達(dá)終極成本的一個(gè)要求。
同時(shí),我們也在做激光雷達(dá)3.0的方案——硬件級(jí)圖像前融合。我們能夠在最原始數(shù)據(jù)Raw data的層面,直接把攝像頭的信息和激光點(diǎn)云的信息做深度的整合,讓算法不再是獨(dú)立去處理激光雷達(dá)的數(shù)據(jù)和攝像頭的數(shù)據(jù),而是同步處理,直接采用前融合的感知算法、感知架構(gòu)。這樣的話,我們?cè)诤竺嬲?chē)傳感器融合集成的過(guò)程當(dāng)中,就不太需要去考慮究竟該采信攝像頭,還是該采信激光雷達(dá)。因?yàn)閮烧叩脑紨?shù)據(jù)其實(shí)是一同進(jìn)到?jīng)Q策系統(tǒng)當(dāng)中來(lái)的,而且兩者的標(biāo)定關(guān)系,對(duì)應(yīng)關(guān)系,還有時(shí)空同步的一些問(wèn)題,都會(huì)在我們前融合的方式當(dāng)中去得到完美的解決。這其實(shí)也是在低成本的前提下,一舉解決了多傳感器系統(tǒng)中,不同傳感器的特性如何互相融合的工程難題。
對(duì)于激光雷達(dá)這種產(chǎn)品,您接觸到的真實(shí)客戶更看重哪一點(diǎn),是不是有一個(gè)排序?
我們?nèi)ツ暝谛袠I(yè)里提出了一個(gè)不可能三角的概念,其實(shí)就是性能、成本和車(chē)規(guī)級(jí)的環(huán)境穩(wěn)定性。在一定情況下同時(shí)做到最優(yōu)確實(shí)難度很高,需要突破技術(shù)的瓶頸。但是,這三點(diǎn)不管是終端用戶、OEM廠商,還是自動(dòng)駕駛方案開(kāi)發(fā)商來(lái)看,都是需要去兼顧的。
既然是量產(chǎn)車(chē)型,量產(chǎn)的場(chǎng)景一定是車(chē)規(guī)級(jí)的。在大規(guī)模量產(chǎn)的情況下,成本要做到最終的終端用戶能夠接受的水平。其中性能可以做一些轉(zhuǎn)化,因?yàn)楸旧硇阅芨诵牡倪€是要去滿足安全、滿足功能。如果說(shuō)直接去討論這三者有沒(méi)有排序,有沒(méi)有取舍,我覺(jué)得其實(shí)是沒(méi)有的,因?yàn)槎己苤匾?/p>
我們?nèi)?shí)現(xiàn)這個(gè)不可能的三角,是希望助力激光雷達(dá)市場(chǎng)和自動(dòng)駕駛賽道能夠達(dá)到市場(chǎng)的預(yù)期,共同把市場(chǎng)做的越來(lái)越大,普及率越來(lái)越高。當(dāng)然,這是宏觀層面的,具體到每一個(gè)場(chǎng)景下,其實(shí)很重要的一件事情就是去做需求分析。不管是低速的L4還是高速的乘用車(chē)ADAS的場(chǎng)景,我們目前在跟客戶一起合作過(guò)程當(dāng)中,一個(gè)非常寶貴的價(jià)值就在于如何把激光雷達(dá)這個(gè)產(chǎn)品定義好。
并不像早些年,大家在比拼產(chǎn)品參數(shù),這不是根本性的需求。最重要的還是一起去跟客戶去定義產(chǎn)品、定義功能,我們究竟在什么樣的ADAS或者是L4的場(chǎng)景下需要多高的分辨率,多遠(yuǎn)的探測(cè)距離,這個(gè)一定是有科學(xué)而且是合理的邏輯分析以及試驗(yàn)驗(yàn)證能夠得到一些結(jié)論的。在此基礎(chǔ)上我們?cè)偃?yōu)化結(jié)構(gòu)方案,來(lái)保證低成本和車(chē)規(guī),這個(gè)是我們過(guò)去在做的事。目前跟客戶也是不斷去互動(dòng),不斷去提升。
確實(shí)我們?cè)谀壳翱磥?lái),以及對(duì)未來(lái)前瞻性的判斷,圖像融合應(yīng)該能夠進(jìn)一步提升感知層的綜合性能,同時(shí)還能夠兼顧車(chē)規(guī)、成本等關(guān)鍵的客戶需求。
您提出激光雷達(dá)3.0時(shí)代的概念,那么和大家暢想一下激光雷達(dá)4.0時(shí)代是什么樣的?
我先挑戰(zhàn)一下您的問(wèn)題,因?yàn)榻K局這個(gè)概念很好。但是我想說(shuō)的是,終局是一個(gè)思考問(wèn)題的方式,而不是一個(gè)思考問(wèn)題的結(jié)論,并不是一個(gè)答案。我們是長(zhǎng)遠(yuǎn)的,更以終局的邏輯和心態(tài)去看待問(wèn)題、分析問(wèn)題。但是我一定要找到一個(gè)最終的解,這也不現(xiàn)實(shí)。所以終局也要定義好在什么范圍內(nèi),在什么尺度下我們看終局是什么。您提到終局,我稍微對(duì)這個(gè)概念做一個(gè)回應(yīng)。
關(guān)于本身3.0,目前我們是行業(yè)的先驅(qū)者,本身我們硬件級(jí)圖像前融合這個(gè)技術(shù)也是業(yè)內(nèi)獨(dú)家的產(chǎn)品,未來(lái)我們?nèi)沃囟肋h(yuǎn),需要相當(dāng)長(zhǎng)的時(shí)間去和用戶共同探索如何上車(chē),如何整合產(chǎn)業(yè)鏈,如何整合整個(gè)生態(tài),去把不同的傳感器去更好地融合在一起。
對(duì)于4.0,咱們朝更遠(yuǎn)的去看,這個(gè)角度絕對(duì)沒(méi)有問(wèn)題,但是今天要給出一個(gè)非常明確的答案還是非常困難的。我稍微探索性的暢想一下,也許會(huì)是一個(gè)更加廣泛,更加廣義的融合,這個(gè)也是一種可能,我們也許會(huì)增加更多的傳感器在一起,也許會(huì)把補(bǔ)盲雷達(dá),或者是主雷達(dá)、前向雷達(dá)都可以更好的集成到一個(gè)產(chǎn)品中,或者是一個(gè)硬件架構(gòu)中,這可能是一個(gè)趨勢(shì)。
另外一個(gè)方向,我想到的可能是人眼和人腦一體化的感知系統(tǒng),也許我們的傳感器會(huì)更加智能化。我們的感知算力層面、算法層面,甚至是決策層面也會(huì)走向前端,會(huì)是一種更加智能化的方式去在前端解決很多決策的問(wèn)題,或者是安全性的問(wèn)題。我覺(jué)得大概有這樣一些idea,但是下一代具體是什么形式還需要一些時(shí)間和工作跟行業(yè)一起去探索。
審核編輯 :李倩
-
傳感器系統(tǒng)
+關(guān)注
關(guān)注
0文章
37瀏覽量
12777 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3981瀏覽量
190030
原文標(biāo)題:激光雷達(dá)3.0:上車(chē)的迷霧與終局
文章出處:【微信號(hào):TanwayTech,微信公眾號(hào):Tanway探維科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
禾賽科技獨(dú)供百度Apollo新一代無(wú)人車(chē)主激光雷達(dá)
一文看懂激光雷達(dá)

基于FPGA的激光雷達(dá)控制板

硅基片上激光雷達(dá)的測(cè)距原理

激光雷達(dá)的探測(cè)技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

華為詳細(xì)解讀激光雷達(dá)
亮道智能:發(fā)布全新一代激光雷達(dá),未來(lái)主攻固態(tài)激光雷達(dá)低價(jià)市場(chǎng)
激光雷達(dá)LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論