") 解決由激光雷達線數(shù)差異導致的三維目標檢測域適應問題
解決由激光雷達線數(shù)差異導致的三維目標檢測域適應問題
本文是對我們ECCV 2022被接收的文章LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection的介紹。在這個工作中,我們通過構(gòu)建偽低線數(shù)點云,利用知識蒸餾方法,來減小由激光雷達線數(shù)域差異導致的模型性能下降問題。很榮幸地,我們的文章被ECCV 2022收錄,目前項目代碼已開源,歡迎大家試用。
arXiv:https://arxiv.org/abs/2203.14956
Code(已開源):
https://github.com/weiyithu/LiDAR-Distillation
概述
近年來隨著人工智能的發(fā)展,自動駕駛技術(shù)開始逐步落地,廣泛應用在無人機,清潔機器人,無人配送小車等無人系統(tǒng)中。而三維目標檢測是自動駕駛技術(shù)中的重要一環(huán),是三維環(huán)境感知的基礎,其目的是檢測出三維空間中每個物體的三維緊致框。相較于基于圖像的純視覺算法,基于點云三維目標檢測方法精度更高,可以提供更加準確的三維位置,是現(xiàn)階段高階自動駕駛使用的方案。
激光雷達雖然可以提供準確的三維信息,但價格也是昂貴的,尤其是高線數(shù)激光雷達。因此在一些較低成本的產(chǎn)品中,例如清潔機器人和無人配送車,無法部署高線數(shù)雷達。然而現(xiàn)有公開數(shù)據(jù)集大部分都是用高線數(shù)雷達采集的,這中間存在著線數(shù)導致的域差異問題會使得我們無法很好地利用這些大型的公開數(shù)據(jù)集。除此之外,與RGB相機不同,激光雷達產(chǎn)品更新迭代較快,不同類型的激光雷達線數(shù)也會是不同的。對于每一代產(chǎn)品都去重新采集數(shù)據(jù)集是非常費時費力,不切合實際的。因此如何更好地利用之前采集的高線數(shù)數(shù)據(jù)集是個值得探究的問題。
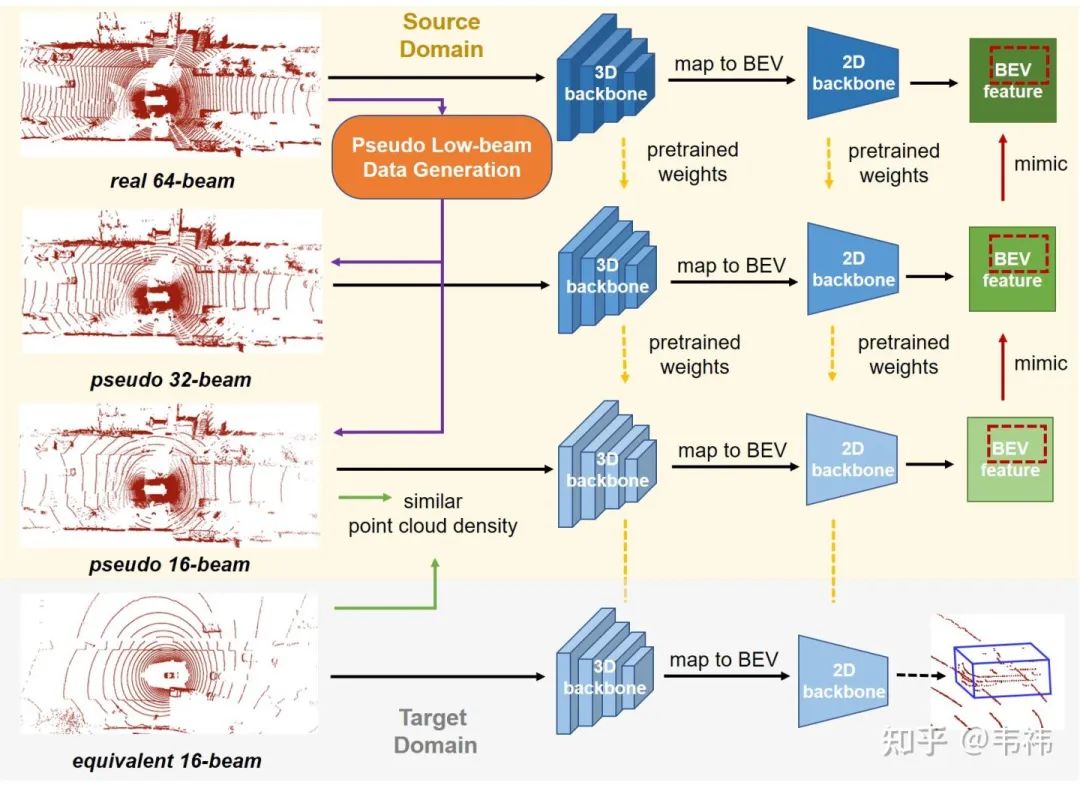
同時,我們發(fā)現(xiàn)之前的一些算法大部分都是為了通用域適應問題設計的(例如ST3D),但面對訓練集是高線數(shù)點云,測試集是低線數(shù)點云的場景,這些算法不能很好地處理。為了解決這個問題,我們提出了LiDAR Distillation。我們方法的核心是對源域高線數(shù)數(shù)據(jù)進行下采樣得到偽低線數(shù)點云,與目標域線數(shù)對齊。以在高線數(shù)點云數(shù)據(jù)集上訓練得到的三維目標檢測器作為教師網(wǎng)絡,在偽低線數(shù)點云數(shù)據(jù)集上訓練得到的三維目標檢測器作為學生網(wǎng)絡,進行離線知識蒸餾算法,提升學生網(wǎng)絡精度。由于下采樣過程是逐步進行的,整個框架是迭代框架。在Waymo->nuScenes上的實驗結(jié)果表明,我們的方法超過了當前最好方法的性能,并且我們的方法可以很好地與其它通用域適應方法進行結(jié)合,在推理過程中不增加任何計算量。
方法
1)生成低線數(shù)偽點云數(shù)據(jù)
為了對齊源域和目標域的點云線數(shù)(假設源域和目標域線數(shù)分別為Bs和Bt),我們首先需要對源域的高線數(shù)數(shù)據(jù)進行下采樣。與一般的點云下采樣方法不同,我們不能對點云進行均勻的采樣,而是需要按照每條線進行采樣。因此,我們首先需要將一個場景的點云中的每個點歸類到每條線中。雖然有一些公開數(shù)據(jù)集中的數(shù)據(jù)有線束的標注,但很多激光雷達點云數(shù)據(jù)(例如KITTI)并沒有這個信息,我們需要自己設計算法分離出每條線上的點。我們將每個點的笛卡爾坐標轉(zhuǎn)換成球坐標:
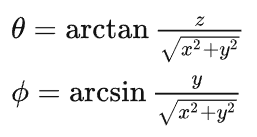
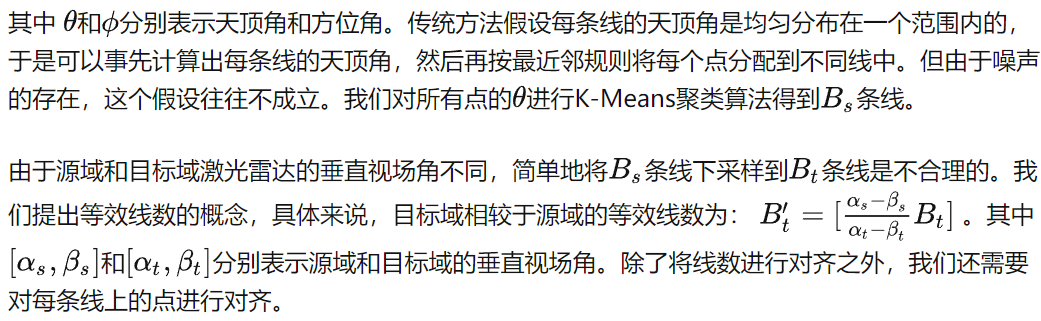
2)利用高線數(shù)點云數(shù)據(jù)進行知識蒸餾
知識蒸餾框架中包含兩個模型:教師網(wǎng)絡和學生網(wǎng)絡。一般而言,教師網(wǎng)絡擁有更多的參數(shù)量和更強的表示能力,可以達到更好的性能;而學生網(wǎng)絡模型更小,推理速度更快,能更好地用在存算資源受限的設備中。學生網(wǎng)絡通過模仿教師網(wǎng)絡的特征來提升自身的性能。與傳統(tǒng)知識蒸餾方法不同的是,在我們的方法中,教師網(wǎng)絡和學生網(wǎng)絡的結(jié)構(gòu)相同,唯一區(qū)別在于教師網(wǎng)絡是在高線數(shù)數(shù)據(jù)上訓練得到的,而學生網(wǎng)絡是在低線數(shù)數(shù)據(jù)上訓練所得。因此我們利用知識蒸餾的目的是將高線數(shù)點云中的豐富信息量傳遞給學生網(wǎng)絡。
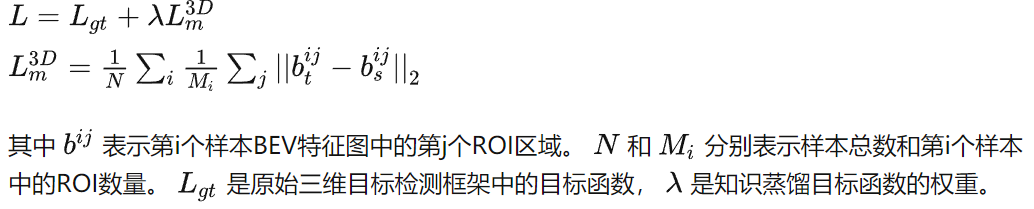
我們注意到大部分三維目標檢測框架都會將三維特征投影到二維鳥瞰圖(BEV)上,得到BEV特征。因此我們將BEV特征作為模仿目標。之前工作相關研究結(jié)果表明,由于特征圖維度非常高,直接回歸高維向量容易導致網(wǎng)絡不收斂。除此之外,特征圖存在很多低響應區(qū)域,這部分的特征往往是不重要的。為了解決這個問題,我們提取BEV特征圖中的感興趣區(qū)域(ROI)并在這些區(qū)域上執(zhí)行模仿操作。整體目標函數(shù)如下:
3)漸進式知識蒸餾
我們發(fā)現(xiàn)當高線數(shù)數(shù)據(jù)和低線數(shù)數(shù)據(jù)之間的線數(shù)差異過大時(例如64線和16線),學生網(wǎng)絡無法很好地向教師網(wǎng)絡進行學習。我們提出漸進式知識蒸餾框架,逐步進行蒸餾學習。以64線數(shù)據(jù)到16線數(shù)據(jù)為例,我們首先生成偽32線數(shù)據(jù),并在上面訓練得到學生模型。緊接著,我們生成偽16線數(shù)據(jù),并以上一步得到的學生模型作為教師網(wǎng)絡。在偽16線數(shù)據(jù)上得到的學生網(wǎng)絡作為最終結(jié)果在目標域的16線數(shù)據(jù)上進行推理。
實驗結(jié)果
1) Waymo->nuScenes實驗
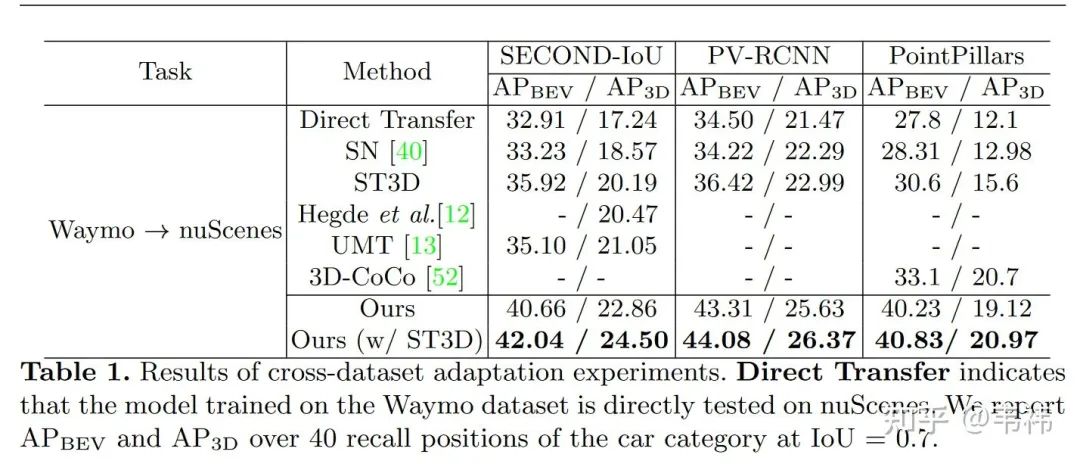
需要注意的是雖然Waymo數(shù)據(jù)集是64線數(shù)據(jù),nuScenes是32線數(shù)據(jù),但由于nuScene垂直視場角是Waymo的一半,因此其等效線數(shù)為16線。盡管我們的方法僅僅是為了由線數(shù)不同導致的域差異問題而設計的,沒有考慮其它域差異因素,我們的方法仍然達到了SOTA的性能。并且,由于我們的方法沒有用到目標域的訓練數(shù)據(jù),我們的方法很容易與其它方法進行互補結(jié)合(例如ST3D),達到更好的效果。
2)KITTI實驗
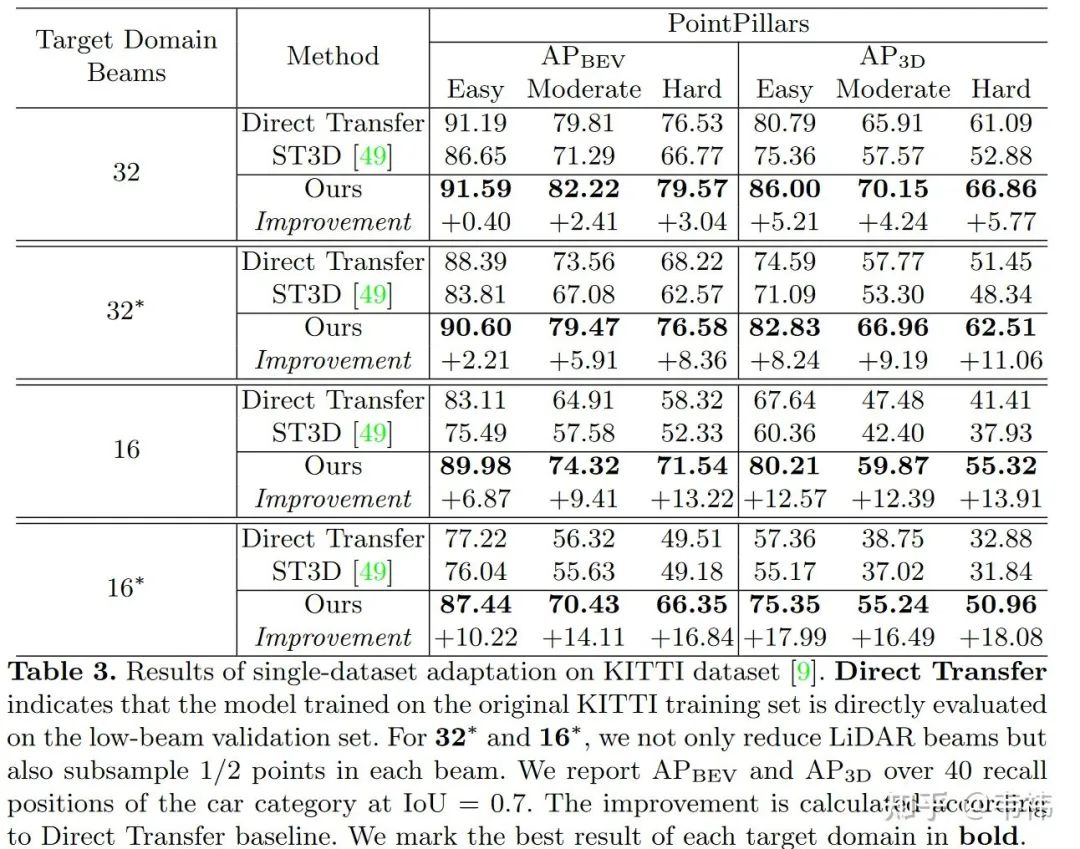
為了排除源域和目標域其它域差異因素的干擾,我們在KITTI上進行了實驗。在這個實驗中,點云線數(shù)不同是源域和目標域唯一的差別,其實這個設置更貼合真正的業(yè)界應用。換句話說,雖然產(chǎn)品更新導致了激光雷達線數(shù)變化,但使用場景并沒有改變。但很可惜的是,學界并沒有在同一場景用不同線數(shù)雷達采集的數(shù)據(jù)集。因此我們只能將64線KITTI數(shù)據(jù)分別下采樣到多種低線數(shù)作為目標域。
3)預訓練實驗
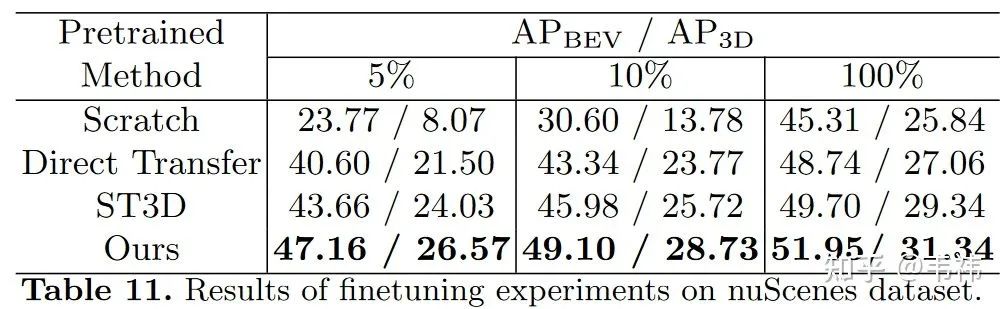
對于公司而言,他們愿意標一些源域的數(shù)據(jù)。因此我們也做了用我們方法在源域上進行預訓練,然后在目標域上進行微調(diào)的實驗。我們發(fā)現(xiàn)僅使用5%的目標域有標簽數(shù)據(jù),我們方法得到的模型性能就可以超過沒有預訓練直接用100%目標域數(shù)據(jù)進行訓練得到模型的性能。
方法不足與未來展望
我們的方法是在BEV特征上進行知識蒸餾的,但很顯然這不是最優(yōu)解,尤其是對于不是很依賴BEV特征的網(wǎng)絡而言,最近也出了不少三維目標檢測知識蒸餾的文章,這些方法值得借鑒。另一方面,現(xiàn)在的公開數(shù)據(jù)集基本上用的都是用機械式激光雷達采集的。而由于成本原因,現(xiàn)在越來越多的廠家選用固態(tài)或者混合固態(tài)的激光雷達,這些雷達中的線數(shù)概念與機械式的不同,因此如何在這些雷達中緩解域差異問題是一個不錯的未來方向。
審核編輯 :李倩
-
人工智能
+關注
關注
1792文章
47425瀏覽量
238962 -
激光雷達
+關注
關注
968文章
3989瀏覽量
190076 -
點云
+關注
關注
0文章
58瀏覽量
3804
原文標題:ECCV 2022 | LiDAR Distillation: 解決由激光雷達線數(shù)差異導致的三維目標檢測域適應問題
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
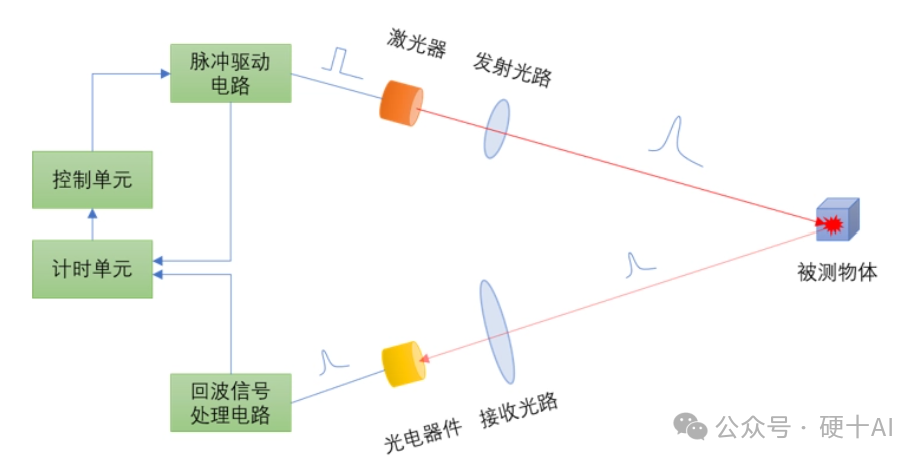
激光雷達的工作原理和分類
什么是三維點云分割
激光雷達的維護與故障排查技巧
激光雷達技術(shù)的基于深度學習的進步
激光雷達在農(nóng)業(yè)中的創(chuàng)新應用
激光雷達在地形測繪中的作用
LIDAR激光雷達逆向建模能用到revit當中嗎
光學雷達和激光雷達的區(qū)別是什么
愛普生IMU產(chǎn)品在激光雷達測繪中的應用

激光距離選通三維成像技術(shù)研究進展綜述
單光子激光雷達技術(shù)發(fā)展現(xiàn)狀與趨勢綜述

三維雷達在煤堆檢測中的具體應用和優(yōu)勢

黑科技來襲!激光雷達在線監(jiān)測裝置,讓輸電線路運維無憂
華為詳細解讀激光雷達
512線激光雷達還不是盡頭,1024線激光雷達早在兩年前已經(jīng)推出?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論