 S7-1200中如何實現PID控制
S7-1200中如何實現PID控制
【導讀】分享S7-1200中如何實現PID控制。
概述
【一】PID控制
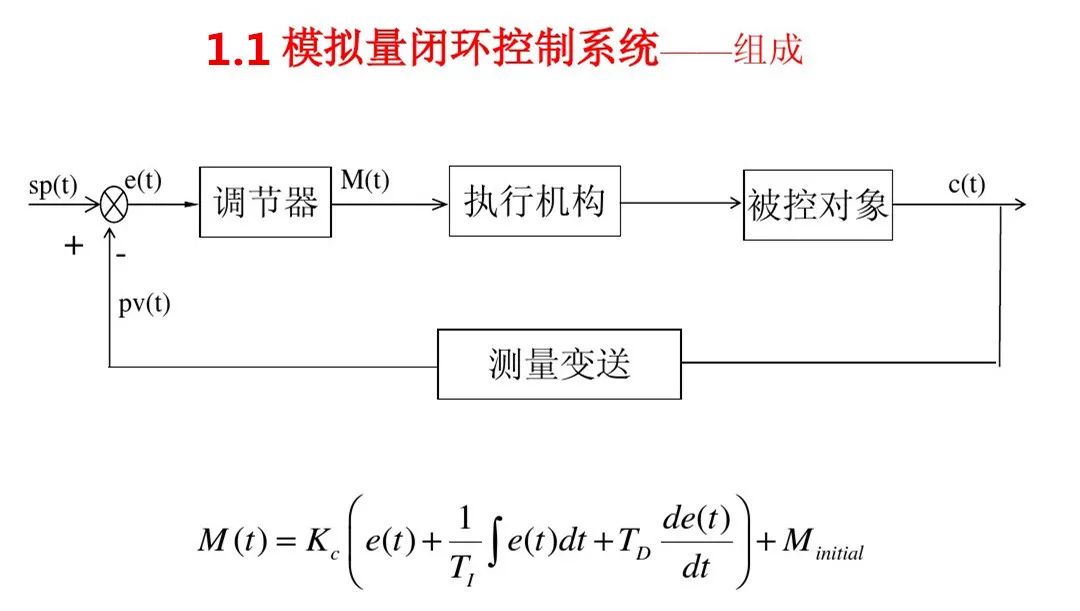
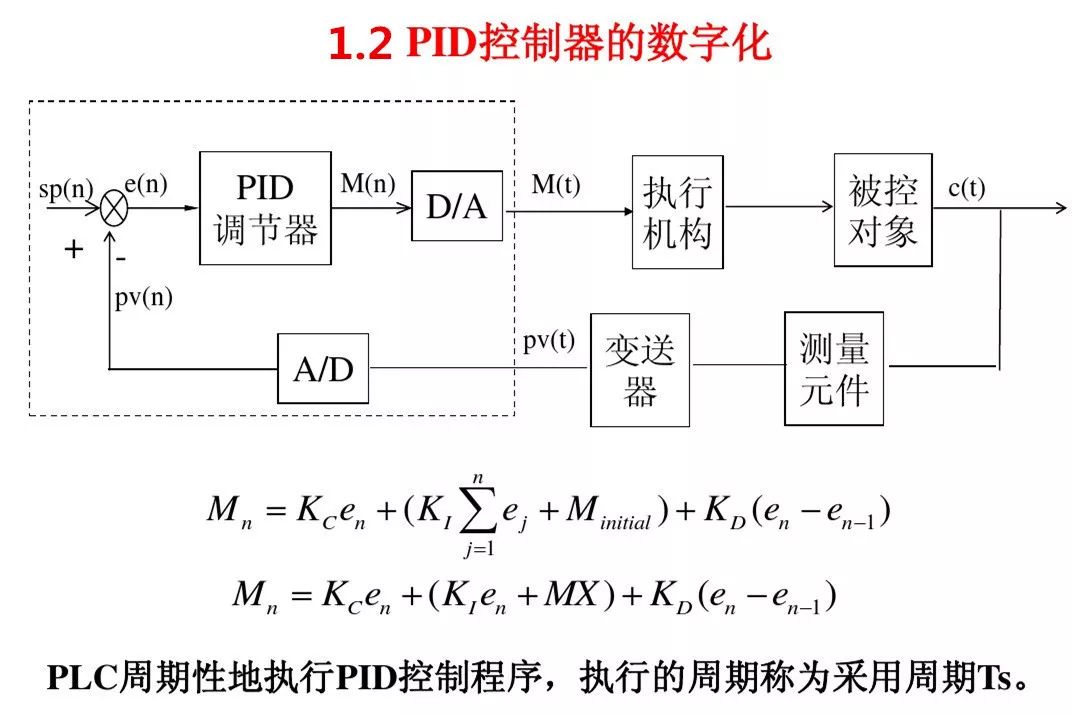
PID功能用于對閉環過程進行控制。PID控制適用于溫度、壓力和流量等物理量,是工業現場中應用最為廣泛的一種控制方式,其原理是對被控對象設定一個給定值然后將實際值測量出來,并與給定值比較,將其差值送入PID控制器,PID控制器按照一定的運算規律,計算出結果,即為輸出值,送到執行器進行調節,其中的P、I和D指的是比例、積分和微分,是一種閉環控制算法。通過這些參數,可以使被控對象追隨給定值變化并使系統達到穩定,自動消除各種干擾對控制過程的影響。
【一】S7-1200的PID控制
S7-1200 CPU提供了PID控制器回路數量受到CPU的工作內存及支持DB塊數量限制。嚴格上說并沒有限制具體數量,但實際應用推薦客戶不要超過16路PID回路。可同時進行回路控制,用戶可手動調試參數,也可使用自整定功能,提供了兩種自整定方式由PID控制器自動調試參數。另外STEP7 Basic還提供了調試面板,用戶可以直觀的了解控制器及被控對象的狀態。PID控制器功能主要依靠三部分實現,循環中斷塊,PID指令塊,工藝對象背景數據塊。用戶在調用PID指令塊時需要定義其背景數據塊,而此背景數據塊需要在工藝對象中添加,稱為工藝對象背景數據塊。PID指令塊與其相對應的的工藝對象背景數據塊組合使用,形成完整的PID控制器。自軟件 博途V13 起,固件為 4.0 或更高版本的 S7-1200,可以使用 PID_Compact V2.2 指令。S7-1200 在 V4.0 以上,博途 V13 SP1 以上,使用 S7-PLCSIM V13 SP1 可以仿真 PLC 程序,但不支持工藝功能(高速計數器、運動控制、PID 調節)的仿真。
(1)下表顯示了 PID_Compact 的每個版本可用于哪種 CPU:
| CPU | FW | PID_Compact |
| S7-1200 | ≥ V4.x |
V2.2 V1.2 |
| S7-1200 | ≥ V3.x |
V1.2 V1.1 |
| S7-1200 | ≥ V2.x |
V1.2 V1.1 |
| S7-1200 | ≥ V1.x | V1.0 |
(2)PID_Compact V2.0 工藝對象典型 CPU 處理時間(取決于 CPU 類型):
| CPU | 典型 CPU 處理時間 (PID_Compact V2.x) |
| CPU 1211C ≥ V4.0 | 300 μs |
| CPU 1215C ≥ V4.0 | 300 μs |
| CPU 1217C ≥ V4.0 | 300 μs |
(3)PID_Compact V2.0 工藝對象背景數據塊的存儲器要求:
| 分類 | PID_Compact V2.x 背景數據塊的存儲器要求 |
| 裝載存儲器要求 | 約 12000 個字節 |
| 總工作存儲器要求 | 788 個字節 |
| 保持性工作存儲器要求 | 44 個字節 |
不需要被控對象的數學模型,結構簡單容易實現,使用方便有較強的靈活性和適應性。

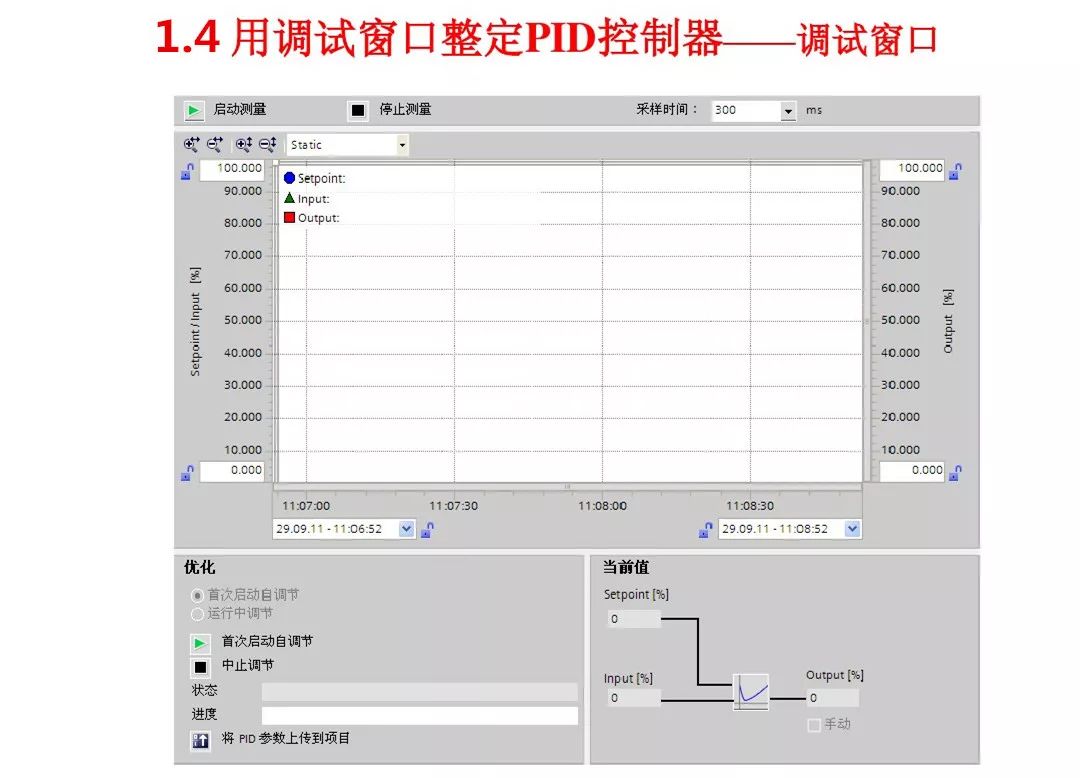
用調試窗口整定PID控制器-調試窗口的功能
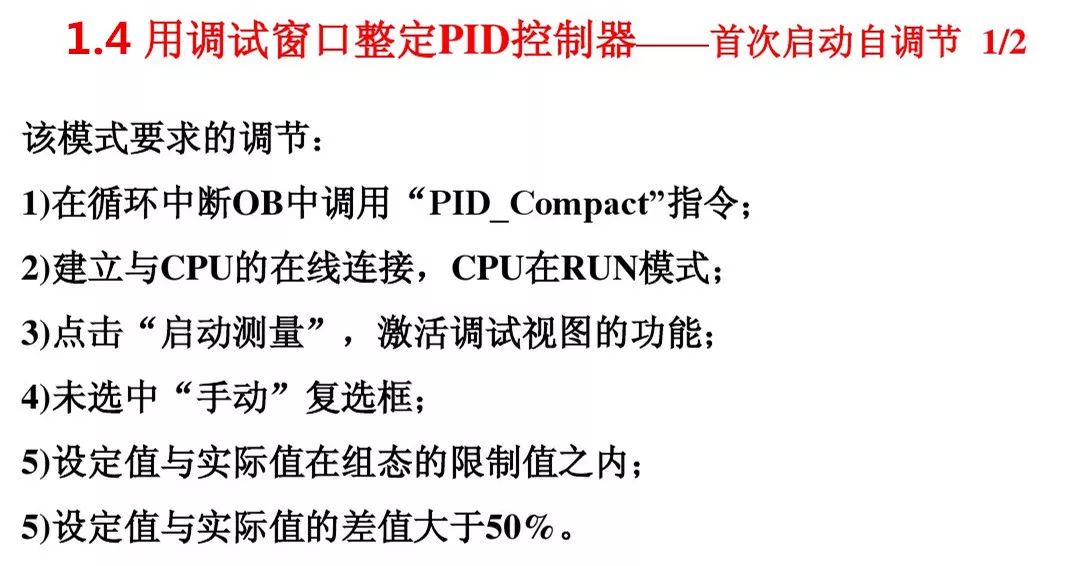
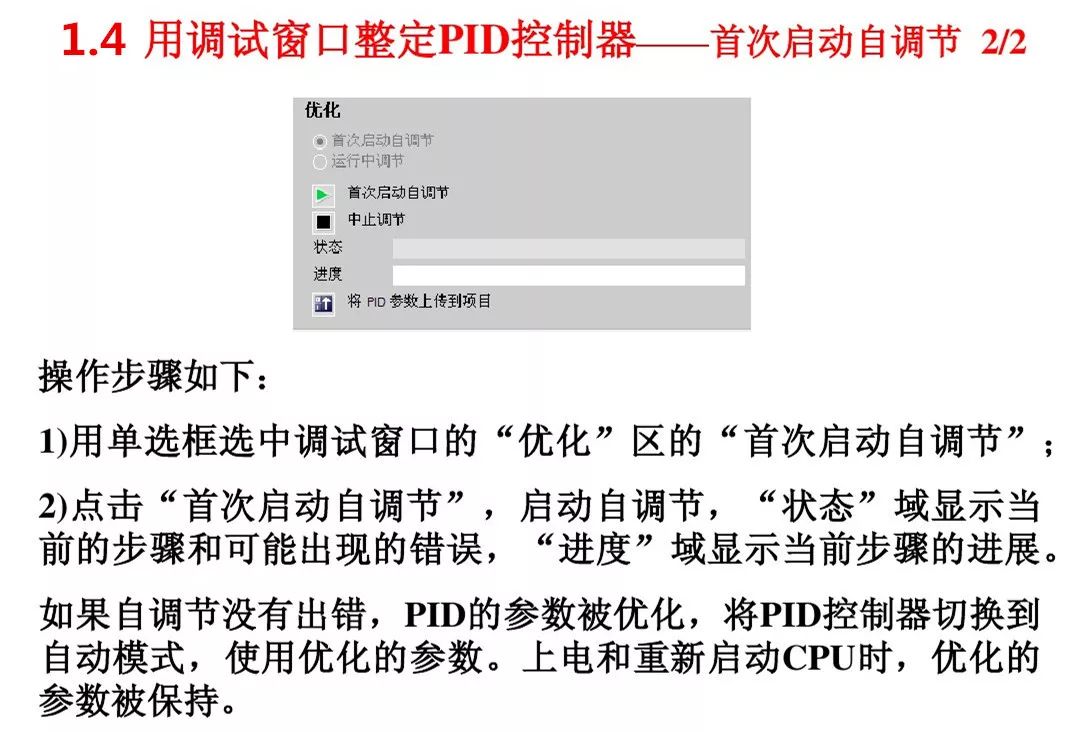
1、使用“首次啟動自調節”功能優化控制器
2、使用“運行中自調節”功能優化控制器,可以實現最佳調節
3、用于趨勢視圖監視當前的閉環控制
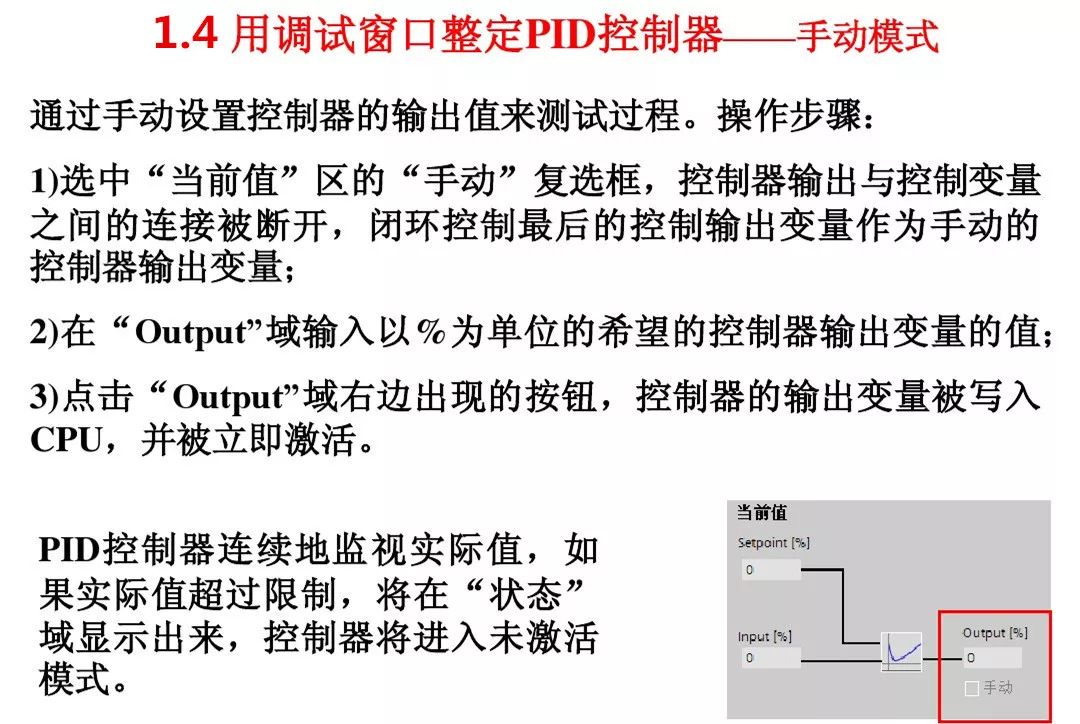
4、通過手動設置控制器的輸出值來測試過程
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16361瀏覽量
178071 -
PID
+關注
關注
35文章
1472瀏覽量
85524 -
S7-1200
+關注
關注
11文章
331瀏覽量
17986
原文標題:【干貨】手把手教你S7-1200中如何實現PID控制
文章出處:【微信號:你身邊的機器人專家,微信公眾號:你身邊的機器人專家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

基于S7-1200的運動控制功能介紹

基于S7-1200的PLC的編程及擴展
基于S7-1200與S120實現TO位置控制的設計

S7-1200運動控制的結構及原理

關于S7-1200和S7-1200之間UDP的通信與仿真

S7-1200如何實現配方的寫入和讀取功能
S7-1200與S7-300的選型區別


基于S7-1200的PID控制






 工商網監
工商網監
評論