 無人機在輸電線路巡檢中發揮著越來越大的作用
無人機在輸電線路巡檢中發揮著越來越大的作用
針對目前巡線方法存在的效率低、成本高以及直升機電力巡檢技術煩瑣和可操作性不強等問題,對無人機系統進行了詳細的闡述,同時結合無人機在線路運維管理中的應用,詳細介紹了無人機巡檢的流程,并重點圍繞輸電線路巡檢中路徑規劃、線路故障的探測及線路的評估預測進行探討,分析得出以下結論:無人機巡檢可有效提高輸電線路巡視與檢修效率,推動輸電線路智慧運維的進程。
社會經濟的快速發展離不開電網規模的迅速擴大。大規模復雜的輸電線路需要更多的人力、物力進行巡檢,由于分布存在差異,輸電線路的缺陷隱患也各不相同。傳統的以人工為主的輸電線路巡檢方法存在巡檢精度低、盲區多、運維范圍小等缺點,不能滿足線路巡檢的要求,傳統巡檢方法存在的這些不足促進了無人機巡檢技術的發展。
1 輸電線路巡檢現狀
目前輸電線路的巡檢方法主要有人工巡檢、機器人巡檢、直升機巡檢和無人機巡檢。其中,人工巡檢只適合小規模、小范圍的輸電線路巡檢,針對大面積、大范圍、復雜的山區和水域等輸電線路的巡檢,人工巡檢需要花費大量人力、物力,且存在巡檢盲區。直升機巡檢效率高,但是需要投入大量的資金,同時直升機技術比較復雜,推廣使用比較困難。機器人巡檢距離比較短,效率低,而且只限于桿塔之間。而無人機由于飛機體積小、成本低、使用方便,技術比較簡單成熟,在電力巡檢中逐漸被認可,其能夠克服直升機、機器人以及人工巡檢的缺點,因而在輸電線路運維工作中扮演的角色日益重要起來。
無人機是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛行器,無人機可以搭載各種監測設備,如紅外、激光雷達、圖像采集設備等。通過無人機,運維人員可以方便地借助監測設備進行人工無法實現的、危險的以及重復性的輸電線路運維工作。
2 無人機輸電線路巡檢
無人機輸電線路的巡檢通常情況下是無人機搭載相機、激光雷達、紅外設備等工具對輸電線路進行巡檢、數據采集。采集的原始數據通過通信設備傳輸至地面終端的工作站,內業數據處理人員利用專業的軟件打開采集的數據,并對數據進行處理,分析得到輸電線路中存在的缺陷隱患,然后根據制訂的運維檢修策略,安排運維人員進行排查消缺。
無人機的巡檢可以通過圖像數據、點云數據、文本數據等對輸電線路的斷股、鳥窩、溫度異常、絕緣子掉串、金具銹蝕、樹障等進行監測分析。
2.1 無人機巡檢系統
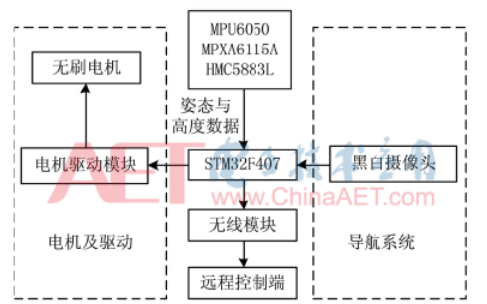
無人機系統包含飛行平臺、機載設備、通信設備、地面站。其中,飛行平臺自身可搭載許多先進的數據獲取儀器,還有自助預警設備和相關的輔助設備,其作用為保持飛行平臺在空中穩定飛行。機載設備作為巡檢工具搭載在飛行平臺上,機載設備的參數根據實際需要設置。通信設備可將采集的數據傳輸至數據處理中心。地面站的主要作用是運維人員可以無線操控無人機,并提供位置信息[1]。
2.2 無人機巡檢過程
輸電線路的巡檢包括多項工作,為使輸電線路的巡檢更加規范,同時提高巡檢效率,需要在巡檢前根據規范、實際項目的需要、現場實際情況等制訂巡檢流程。無人機巡檢作業流程如圖1所示。
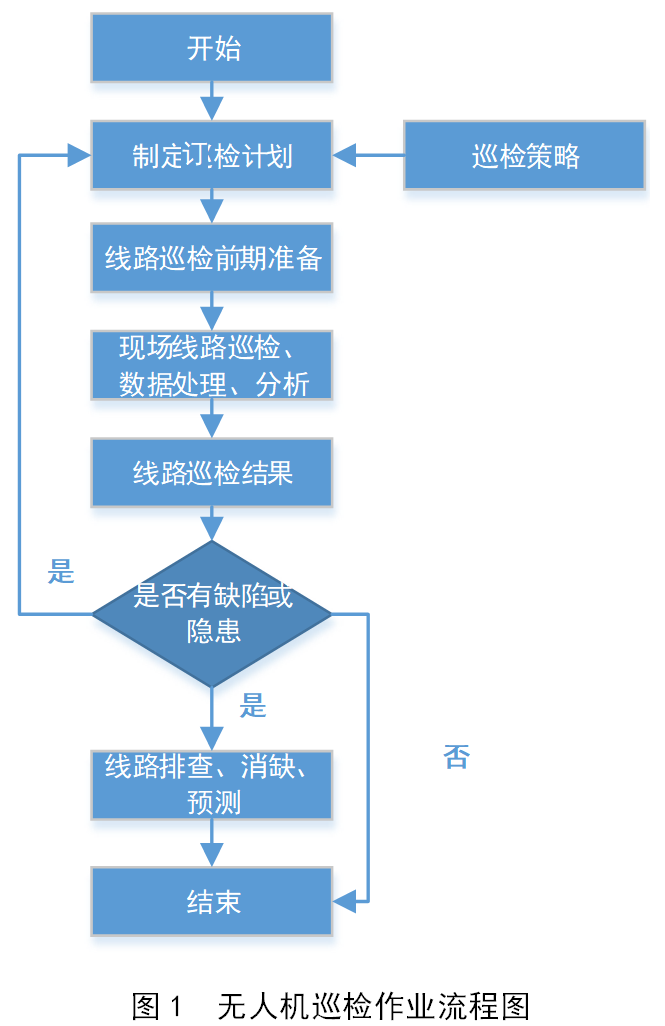
(1)巡檢策略。輸電線路的運維管理單位根據管轄區域內輸電線路上一年的巡檢結果及上級單位的任務安排,綜合制訂符合單位需求的運檢策略,并細化到每季度的巡檢策略。
(2)制訂巡檢計劃。根據運維策略并結合線路巡檢的情況(缺陷、隱患),制訂合理的巡檢計劃。
(3)巡檢前期準備。根據之前人工巡檢踏勘的線路地形地貌和周圍的環境,準備線路、桿塔的臺賬信息,以備后續使用。
(4)現場線路巡檢,數據處理、分析。現場線路巡檢主要包括無人機飛行前的準備和線路巡檢。無人機飛行前需要對無人機進行檢查、試飛,包括確定飛行路線;線路巡檢是無人機搭載機載設備按照設定的飛行路線對線路重要部位進行數據采集。數據處理、分析主要是對采集的數據進行存儲、預處理、分析。
(5)線路巡檢結果。根據數據分析結果,總結巡檢的結果,以備線路狀態評估使用。
(6)線路排查、消缺。根據線路巡檢結果,對出現缺陷或隱患的線路重要部位進行現場排查,并進行消缺處理,對于存在隱患的部分進行線路的狀態評價。
2.3 巡檢路徑規劃
在使用無人機巡檢時,最為重要的是輸電線路的巡檢路徑要明確。傳統的巡檢路徑規劃方法是人工采集線路的重要點位,然后將重要點位導入無人機的導航系統中,這種方法需要嚴謹的計算,否則會出現無人機飛行安全問題[2]。
為方便運維人員更加有效地規劃線路巡檢路徑,可使用遺傳算法進行路徑規劃。輸電線路巡檢路徑主要包含巡檢線路的起點、終點、拐點以及線路中重要目標點的坐標信息,同時路徑規劃也與無人機自身的參數以及實際巡檢任務的要求有關,如無人機電池容量、最低巡檢高程、最大拐角等。路徑規劃的最優選擇是在滿足巡檢要求的前提下找到符合約束條件的線路,同時消耗較少的人力、物力[3]。
在實際巡檢中,懲罰函數的表達式如下:

式中:a、b、c、z為常數;xi表示不同的約束條件。 實際的運維巡檢中,可以根據兩個相鄰的路徑節點,計算整個線路節點總的路徑長度,假設一條線路有n+1個目標點,目標函數可以表示為:

式中:mi表示第i段線路的長度;h表示懲罰函數。 根據式(1)(2),路徑規劃的函數可以表示為:

這種規劃方法是根據適應度函數的最小解得到最佳巡檢路徑,約束條件的選擇及常數需要根據實際巡檢任務具體分析。
2.4 線路故障的探測
輸電線路故障的探測根據故障的類型主要分為3個方面:
(1)根據無人機搭載的攝像頭對線路周圍進行拍照,運維人員根據照片判斷分析故障類型及故障的嚴重程度。人工逐個進行分辨存在效率低、人為干擾過多等缺點,因此需采用智能深度學習的方法對輸電線路圖片進行批量識別,目前廣泛使用深度學習方法識別故障,對故障進行分類。使用較為廣泛的主要是基于RetinaNet模型的深度學習方法,此方法選取以分類損失函數為核心特征的金字塔網絡為骨干網絡用于圖像目標的自動檢測。相比傳統的一階目標檢測和二階目標檢測模型,此方法在精度和準確度上都較高[4]。
(2)無人機搭載紅外線和紫外線監測設備,利用紅外線獨有的優勢監測輸電線路的溫度異常,確定線路的故障點位置;利用紫外線監測輸電線路放電后產生的信號,以此檢測線路放電缺陷點故障。
(3)無人機搭載激光雷達設備對輸電線路進行數據采集,根據測區已有的控制點進行數據計算,求得點云數據的坐標點位置。對點云數據進行預處理,進行點云數據分類,形成彩色點云,分類分別為高植被、低植被、電力線、桿塔、地面等多類。根據已有的點云數據量測樹木、建筑物至輸電線路的距離,并依據電網樹障判斷標準分類出輸電線路的危險點。同時,可以根據點云數據模擬出大風、高溫、覆冰情況下的輸電線路,為樹障砍伐、輸電線路改造提供依據,從而為電力線路的檢修運維和建設工作提供方便[5]。
2.5 輸電線路的評估預測
根據巡檢數據分析結果,線路的隱患目標點會對輸電線路的運行狀態造成安全風險,因此需要對巡檢后的線路做風險評估預測。輸電線路風險評估,主要涉及設備的健康度、交叉跨越類型、微氣象因子等。設備健康度直接引用設備狀態評價結果(巡檢數據的分析),分為正常、注意、異常和嚴重4種狀態;微氣象因子包括氣溫、降水量、風速、相對濕度、大氣壓強等。建立風險評估模型,技術路線如圖2所示。
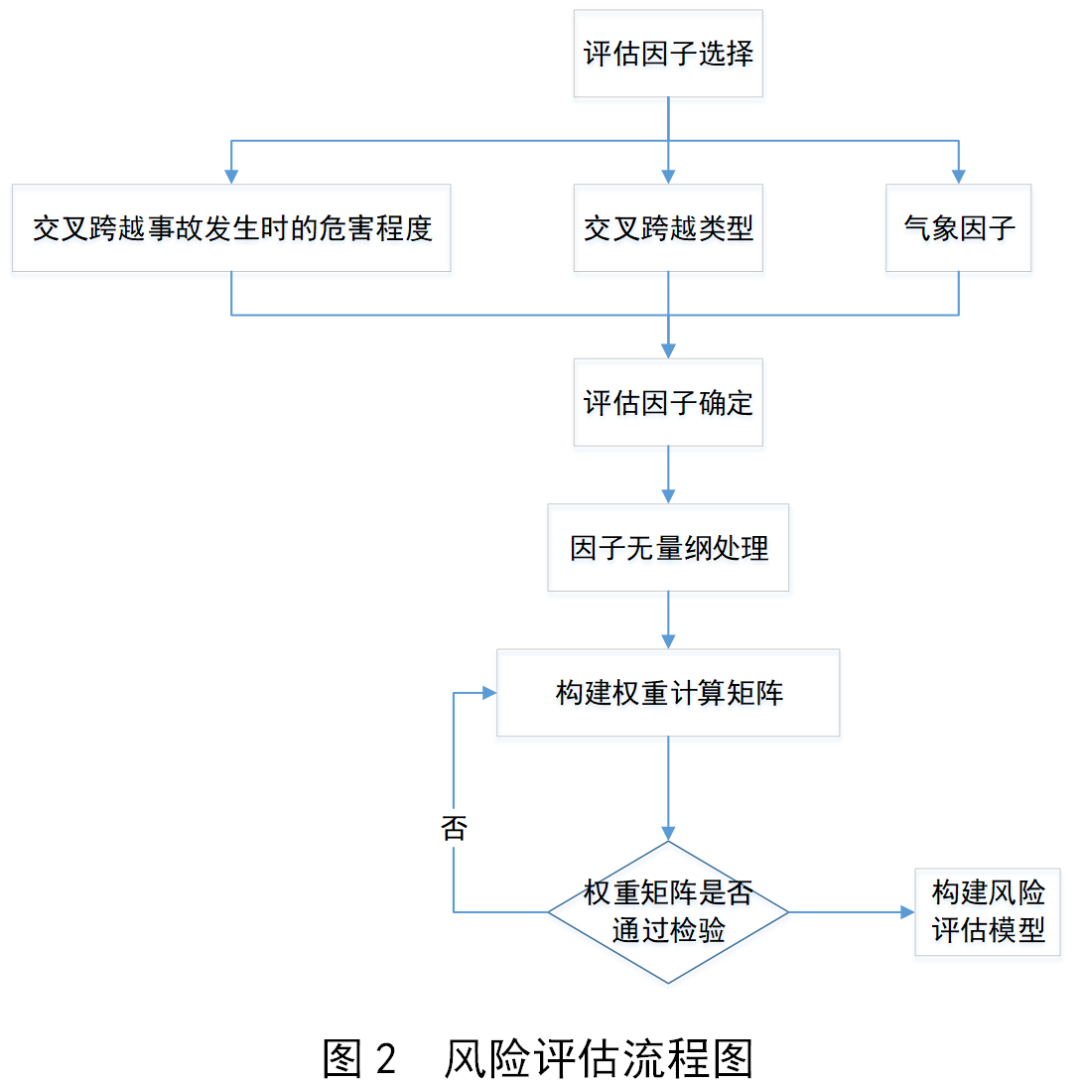
根據設備健康度和交叉跨越重要性,確定風險評估管控級別——Ⅰ級、Ⅱ級、Ⅲ級、Ⅳ級,根據不同的管控級別制訂不同的管控措施,可以有力保障輸電線路安全穩定運行。缺陷隱患整治應做到及時發現、準確定級、立即消缺、閉環管控,原則上,應在規定時限內完成整治處理,或采取必要的措施將隱患影響盡可能降至最低。
4 結語
無人機因其輕量便捷、成本低的優勢,在輸電線路巡檢中發揮著越來越大的作用,有著廣闊的發展前景。無人機搭載機載設備進行巡檢很大程度上節約了人力、物力,同時可以應用于人工無法進行巡檢的線路以及危險線路,避免了線路巡檢的盲點,為線路的運維管理提供了強有力的輔助工具,推動了輸電線路運維的智能化進程。無人機搭載設備監測的多源海量數據為輸電線路的智能分析提供了數據支撐,促進了深度學習、人工智能方法在輸電線路運維中的應用。
審核編輯:劉清
-
輸電線路
+關注
關注
1文章
568瀏覽量
22895 -
無人機
+關注
關注
230文章
10437瀏覽量
180455 -
激光雷達
+關注
關注
968文章
3972瀏覽量
189930
原文標題:無人機在輸電線路巡檢中的應用
文章出處:【微信號:機電信息雜志,微信公眾號:機電信息雜志】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
供應 智能電網輸電線路在線監測系統
基于lora的輸電線路狀態監測
如何降低電力巡檢的維護成本
無人機飛控系統
噴火無人機清除導線異物,為輸電線路的安全保駕護航
如何使用攝像頭的輸電線無人機進行自主巡線的設計方案資料說明
冀北地區首次220千伏輸電線路實現無人機自主機巡
無人機機載激光雷達巡檢線路 全面提升輸電線路運維水平
如何利用無人機進行日常輸電線路的機巡作業





 工商網監
工商網監
評論