 加速度計和陀螺儀的測量范圍、測量精度及單位換算方法
加速度計和陀螺儀的測量范圍、測量精度及單位換算方法
01說在前面的話
1. 有不少朋友在做項目的時候經常涉及到加速度計和陀螺儀的原始數據轉換為其他的單位的問題,這篇文章梳理和推導一下。
1)加速度計的原始數據 在應用時常見的轉換單位有: g、m/s^2 、角度
2)陀螺儀的原始數據 在應用時常見的轉換單位有:°/s、red/s、角度
2. 是對《幾種常用的加速傳感參數比較》這篇文件更新,在這篇文章中將不同參加的傳感器參數對比和精度參數寫在一起,本文專講精度參數和單位換算
02測量范圍和精度
在MEMS 傳感的數據手冊中都給出了加速度計和陀螺儀的測量范圍和測量精度。有測量范圍是可以推算出測量精度的。
不論是加速還是陀螺儀,數據寄存器都是16位的,由于最高位是符號位,故而數據寄存器的輸出范圍是 -7FFF~7FFF (-32767~32767)。
陀螺儀:
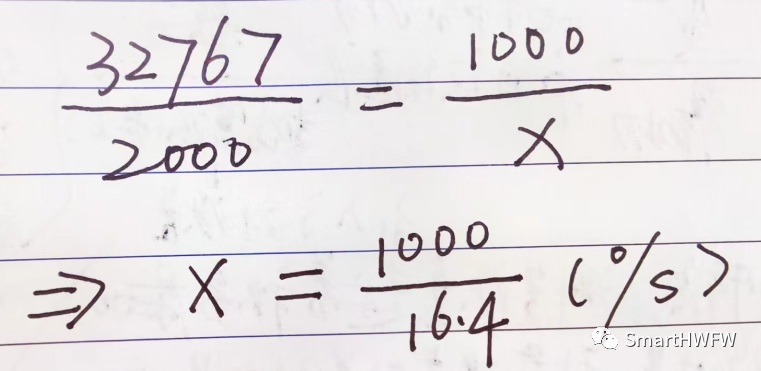
假如,我們選擇陀螺儀的測量范圍是 ±2000,在數據手冊中 16.4 LSB/(°/s)是 32767/2000 = 16.4 計算出來的
那么寄存器的數字和測量范圍的對應關系:
| -32767 | 32767 |
| -2000(°/s) | 2000(°/s) |
比如,通過寄存器讀取陀螺儀的值是1000的,那么我們求角速度 X
加速度:
同樣假如,我們選擇加速度的測量范圍是 ±16,在數據手冊中 2048 LSB/g 是 32767/16 = 2048 計算出來的
那么寄存器的數字和測量范圍的對應關系:
| -32767 | 32767 |
| -16g | 16g |
比如,通過寄存器讀取陀螺儀的值是1000的,那么我們求重力加速度 X X = 1000 / 2048 = 0.49g
03單位換算
1. 不同量程下精度的計算
加速度計量程為:±2g
獲取到的加速度計數據 除以16384
加速度計量程為:±4g
獲取到的加速度計數據 除以8192
加速度計量程為:±8g
獲取到的加速度計數據 除以4096
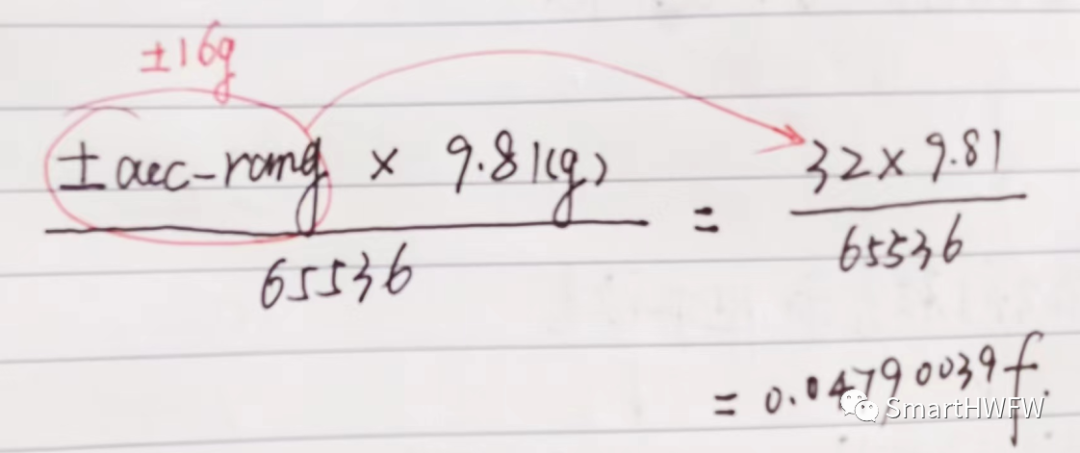
加速度計量程為:±16g
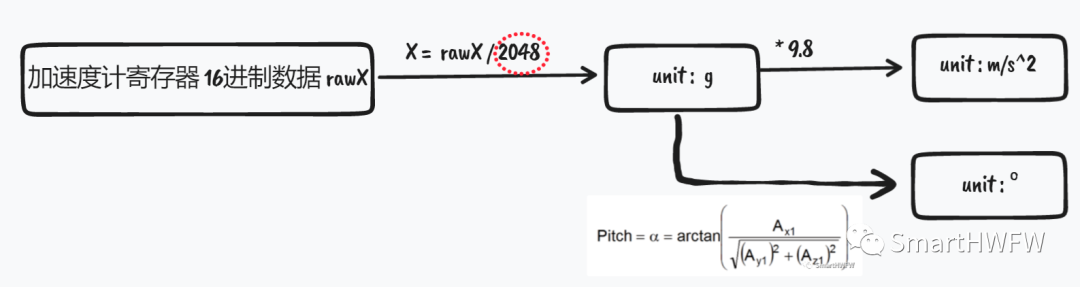
獲取到的加速度計數據 除以2048
2.可以轉化為帶物理單位的數據,單位:g(m/s^2)
3. 可以通過三角關系轉換為角度
float tanalpha = 0,tanbeta = 0,tangamma = 0; tanalpha = (float)data->rawx / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawz * (float)data->rawz) ); data->anglex = (float)atan(tanalpha)*57.3; tanbeta = (float)data->rawy / sqrt( ((float)data->rawx * (float)data->rawx + (float)data->rawz * (float)data->rawz) ); data->angley = (float)atan(tanbeta)*57.3; tangamma = (float)data->rawz / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawx * (float)data->rawx) ); data->anglez = (float)atan(tangamma)*57.3;
1. 不同量程下精度的計算
陀螺儀量程為:±250 dps
獲取到的陀螺儀數據除以131
陀螺儀量程為:±500 dps
獲取到的陀螺儀數據除以65.5
陀螺儀量程為:±1000dps
獲取到的陀螺儀數據除以32.8
陀螺儀量程為:±2000dps
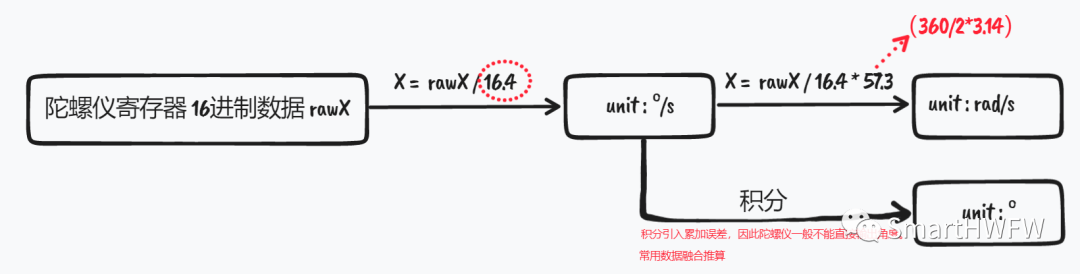
獲取到的陀螺儀數據除以16.4
2.可以轉化為帶物理單位的數據,單位:rad/s
//原始數據 raw_data[AXIS_X] = (buf[0] << 8) | buf[1]; raw_data[AXIS_Y] = (buf[2] << 8) | buf[3]; raw_data[AXIS_Z] = (buf[4] << 8) | buf[5]; //坐標map轉換 remap_data[icm_dev.cvt.axis[AXIS_X]] = icm_dev.cvt.sign[AXIS_X] * raw_data[AXIS_X]; remap_data[icm_dev.cvt.axis[AXIS_Y]] = icm_dev.cvt.sign[AXIS_Y] * raw_data[AXIS_Y]; remap_data[icm_dev.cvt.axis[AXIS_Z]] = icm_dev.cvt.sign[AXIS_Z] * raw_data[AXIS_Z]; //重力加速度計算 unit: m/s2 data->x = (float)remap_data[AXIS_X] * KSCALE_ACC_16G_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_ACC_16G_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_ACC_16G_RANGE; //red/s data->x = (float)remap_data[AXIS_X] * KSCALE_GYRO_2000_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_GYRO_2000_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_GYRO_2000_RANGE;
審核編輯:湯梓紅
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753606 -
陀螺儀
+關注
關注
44文章
784瀏覽量
98716 -
加速度計
+關注
關注
6文章
702瀏覽量
45897
原文標題:MEMS 慣性傳感器 - 加速度計&陀螺儀原始數據到不同單位的轉換
文章出處:【微信號:SmartHWFW,微信公眾號:SmartHWFW】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于加速度計的無陀螺慣性導航系統的研究
關于陀螺儀和加速度計的選擇問題
請問為什么陀螺儀需校準而加速度計不需?
基于加速度計的傾角測量精度提高
介紹加速度計和陀螺儀的數學模型和基本算法
介紹加速度計和陀螺儀的數學模型和基本算法
利用加速度計和陀螺儀測量車輛運動
加速度計和陀螺儀的參數意義







 工商網監
工商網監
評論