 松下A5伺服驅動器I/F口(X4)接腳詳解
松下A5伺服驅動器I/F口(X4)接腳詳解
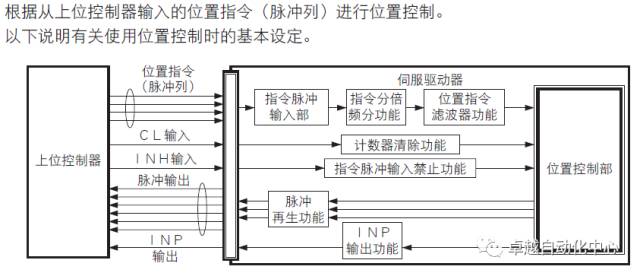
松下伺服有位置模式(脈沖控制),速度模式和轉矩模式(IO控制)三種。
后兩者直接用PLC輸出到驅動器指定的IO端口即可控制,當然要設定必要的參數,如模式設定,轉速大小,轉矩大小等。
位置模式較為常用,用于定位場所使用。可以使用正反脈沖控制,也可以使用脈沖加方向控制。對于接線請參照伺服驅動器說明書。可以正確的控制,關鍵在于接線正確和參數設定正確。
最基本的接線伺服驅動器側 PLC側
1,2,7 ------接外部24V 4 ----------正脈沖 Y0 6 ----------反脈沖 Y1 29 ---------伺服使能 輸出點 31 ---------報警清除 輸出點 37 ---------伺服報警 輸入點 19 ---------伺服Z相 高速計數器端口或1PG的PG0-端25,36,41---接外部0V
松下A5伺服驅動器I/F口(X4)接腳詳解

1腳:OPC1,指令脈沖輸入2,脈沖信號
2腳:OPC2,指令符號輸入2,控制方向
3腳:PULS1,指令脈沖輸入2,+12V需串接1KΩ,1/2W的電阻,+24V需串接21KΩ,1/2W的電阻
4腳:PULS2,指令脈沖輸入2,plc脈沖輸出端子。
5腳:SIGN1,指令符號輸入2,+12V需串接1KΩ,1/2W的電阻,+24V需串接21KΩ,1/2W的電阻
6腳:SIGN2,指令符號輸入2,plc繼電器輸出端子,
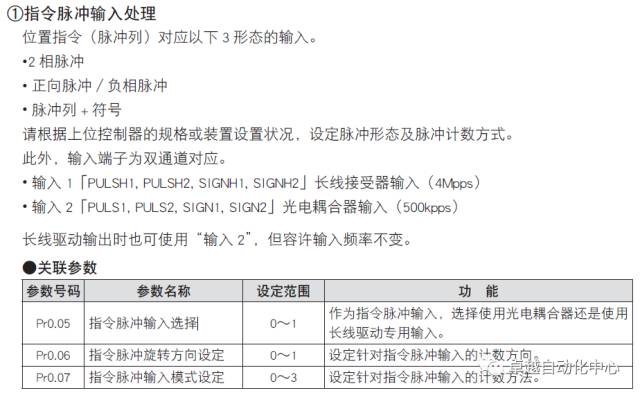
1——6腳該段輸入脈沖在500kpps以下使用。為光電耦合器輸入。對應行驅動線/開路集電極。容許輸入最高頻率在長線驅動器輸入時為500kpps,集電極開路輸入時為200kpps。
設置參數為:
PR0.05指令脈沖輸入選擇
PR0.06指令脈沖極性設定
PR0.07指令脈沖輸入模式設定
最大輸入電壓DC24V,額定電流10mA。(輸入電路參考3--30)
7腳:COM+,控制信號電源(+).電源的最低電壓為11.4V以上。
8腳:NOT,反向驅動禁止輸入。
9腳:POT,正向驅動禁止輸入。
8——9腳參數設置為:
PR5.04驅動禁止輸入設定(默認值1)
PR5.05驅動禁止時順序設置(默認值0)
接腳描述參考3--38)與錯誤碼38有關聯。
10腳:BRKOFF-,外部制動器解除輸出。
11腳:BRKOFF+,外部制動器解除輸出。
12腳:ZSP,零速檢測輸出。
13腳:GND,信號地。
14腳:SPR/TRQR/SPL,速度指令輸入/轉矩指令輸入/速度限制輸入。
15腳:GND,信號地。
16腳:P-ATL/TRQR,正向轉矩限制輸入/轉矩指令輸入。
17腳:GND,信號地。
18腳:N-ATL,反向轉矩限制輸入。
14——18腳(輸入電路參考3--31)
19腳:CZ,Z相輸出(開路集電極)。
20腳:無。。
21腳:OA+,A相輸出。
22腳:OA-,A相輸出。
23腳:OZ+,Z相輸出。
24腳:OZ-,Z相輸出。
25腳:GND,信號地。
控制輸入出廠設定見3-37,4-32,4-33
26腳:VS-SEL1; ZEROSPD; SI3輸入,
位置控制時為減震控制切換輸入(VS-SEL1),設置參數為PR2.13減振濾波器切換選擇。
速度、轉矩控制時為零速箝位輸入(ZEROSPD),設置參數為PR3.15零速箝位機能選擇(默認值0,無效)/PR3.16零速箝位等級。
27腳:GAIN;SI4輸入,
增益切換輸入(GAIN),
位置控制時PR1.15
速度控制時PR1.20
轉矩控制時PR1.24
28腳:DIV1 ;INTSPD3;SI5輸入,
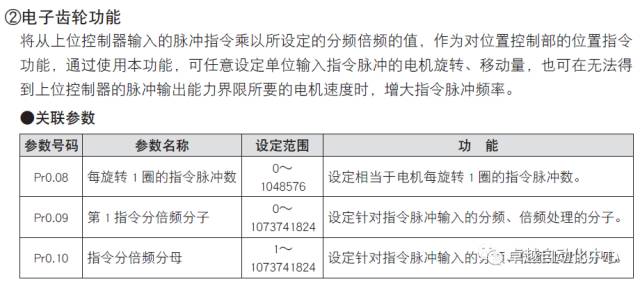
位置控制時:指令分倍頻切換輸入1(DIV1),參數設置見3-39及PR0.09/0.10,PR5.00---5.02。
速度控制時:內部指令速度選擇3輸入(INTSPD3),PR3.00/PR3.06
29腳:SRV-ON;SI6輸入,
伺服ON輸入(SRV-ON),
30腳:CL;INTSPD2;SI7輸入,
位置控制時:偏差計數器清零輸入(CL),參數設置見3-38,PR5.17
速度控制時:內部指令速度選擇2輸入(INTSPD2),PR3.00/PR3.05
31腳:A-CLR;SI8輸入,
警報清除輸入(A-CLR),參數設置見2-63(8),6-3,7-25。PR5.16警報清除輸入設定,識別時間默認120ms。即接通時間要超過120ms。當過載保護動作時,可在發生警報約10s后通過報警解除信號清除。
32腳:C-MODE;SI9輸入,
控制模式切換輸入(C-MODE),參數見PR0.01
33腳:INH;INTSPD1;SI10輸入,
位置控制時:指令脈沖禁止輸入(INH),與錯誤碼24有關聯。參數見PR5.18
速度控制時:內部指令速度選擇1輸入(INTSPD1),PR3.00/PR3.04
34腳:S-RDY-,伺服準備就緒輸出。
35腳:S-RDY+,伺服準備就緒輸出。
36腳:ALM-,伺服警報輸出。
37腳:ALM+,伺服警報輸出。
36—37腳,在報警狀態時停止輸出。
38腳:INP-,AT-SPEED-,
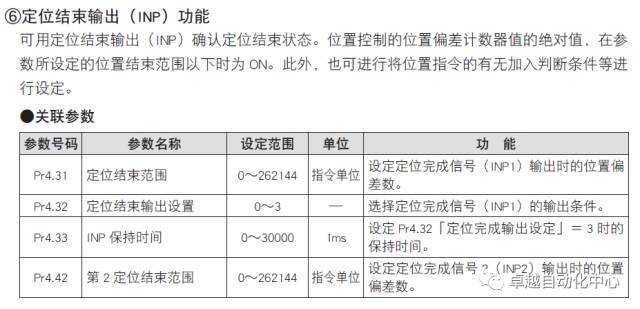
位置控制時:定位完成輸出(INP-)。
速度轉矩控制時:速度到達輸出(AT-SPEED-)。
39腳:INP+,AT-SPEED+,
位置控制時:定位完成輸出(INP+)。
速度轉矩控制時:速度到達輸出(AT-SPEED+)。
40腳:TCL,轉矩限制中輸出。接口描述參考3—45;參數設置為PR0.13第一轉矩限制(默認值500)/PR5.21轉矩限制選擇(默認值1,使用第一轉矩限制)/PR5.22第二轉矩限制(默認值500)
41腳:COM-,控制電源負極(-)
42腳:IM,模擬監視器輸出。
43腳:SP,速度監視輸出。
44腳:PULSH1,指令脈沖輸入1
45腳:PULSH2,指令脈沖輸入1
46腳:SIGNH1,指令符號輸入1
47腳:SIGNH2,指令符號輸入1
位置控制模式有效。44——47腳參數設定PR0.06指令脈沖極性設定/PR0.07指令脈沖輸入模式設定/PR0.05指令脈沖輸入選擇,容許輸入最高頻率為4Mpps。(輸入電路參考3--31)
48腳:OB+,B相輸出。
49腳:OB-,B相輸出。
50腳:FG,框體接地。驅動器內部與地線端子連接。
審核編輯:湯梓紅
-
plc
+關注
關注
5016文章
13383瀏覽量
464746 -
松下
+關注
關注
14文章
27128瀏覽量
93581 -
伺服驅動器
+關注
關注
22文章
488瀏覽量
31719
原文標題:【知識】松下伺服電機的PLC驅動信號連接
文章出處:【微信號:設備維修屋,微信公眾號:設備維修屋】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論