") KUKA位置的坐標輸入
KUKA位置的坐標輸入
$ROBROOT
機器人位置
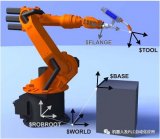
結構類型 FRAME 的變量指明基于 WORLD 坐標系的 ROBROOT 坐標系位置。
X、Y、Z:原點沿著軸的推移,單位:[mm]
A、B、C:軸角度的旋轉,單位:[°]
ROBROOT 坐標系始終位于機器人足部。在默認配置中,ROBROOT 坐標系與 WORLD 坐標系是一致的。
地面安裝:默認情況下無推移
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 0.0}
天花板安裝:軸轉角 C 轉動 = 180°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 180.0}
墻上安裝:軸轉角 B 轉動 = 90°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 90.0,C 0.0}
機器人位于生產單元內的特定位置上 ($ROBROOT<> $WORLD)。將基于 $WORLD
的機器人位置的坐標輸入 $ROBROOT。
審核編輯:彭靜
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28476瀏覽量
207414 -
World
+關注
關注
0文章
5瀏覽量
6207
原文標題:KUKA 系統變量: $ROBROOT
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
如何使用ESP12E板來獲取位置的實時坐標
你有沒有想過在不使用任何 GPS 硬件的情況下獲取設備的位置?聽起來不錯!!是的,只需使用 NodeMCU ESP 板就可以獲取位置坐標,而無需任何額外的硬件。在這里,我們將使用ESP12E 板來
求助 如何提取圖像中的鼠標位置坐標
`求助 如何把圖像中鼠標所在位置的坐標提取出來,之前看過提取鼠標位置的程序,可惜只是整個面板的鼠標位置,如何才能將圖中下面的像素點坐標提取出
發(fā)表于 04-23 15:40
labview運動位坐標位置控制
想通過表格設置電機的每次運動位置,且表格必須在上一行有坐標參數的情況下,才能輸入下一行的坐標參數,并且自動更新行首的第X點,如何實現?
發(fā)表于 07-06 17:19
使用pads封裝制作pcb時如何輸入xy坐標定位孔位置 ?
現公司要求全部用PADS畫板,原來用allegro的,剛開始學習PADS,在做封裝時發(fā)現不知道如何輸入xy坐標精確定位。焊盤腳是可以修改XY坐標位置,現在不知道空位孔如何定位了。哪位大
發(fā)表于 12-10 09:56
KUKA機器人問題解答
開機后沒有選擇工具。 解決方案:配置→當前工具/基坐標→工具號→1 2 專家登陸 一般情況,開機后我們要編輯程序時,首先我們要登陸專家級別,有助于我們操作。 解救方案:配置→用戶組→專家→登陸→密碼KUKA→登陸
發(fā)表于 07-15 07:48
CAD坐標標注中如何標注普通坐標
,給出各個需要標注的坐標位置點進行標注(如果當前未定義基準坐標,命令自動切換到標注基準坐標),命令行提示如下。當前繪圖單位:毫米請輸入
發(fā)表于 03-11 13:38
KUKA機器人應用及系統概述
KUKA機器人工具坐標系的建立執(zhí)行方法:將待檢測的工具安裝在法蘭上,找出一個合適的參考點 它可以是固定在工作空間的某一參考芯。
發(fā)表于 10-16 15:15
?9次下載
關于KUKA 焊接機器人
KUKA 為各種復雜的焊接任務都準備了正確的軟件:因此在焊接前就能用 KUKA.TouchSense 和 KUKA.SeamTech Finding 精確地確定工件或焊縫的位置。
KUKA C4機器人軌跡BASE與TOOL坐標
我們通過KUKA計算器或著運算程序可以得出:這個X向的偏差可以使工具坐標的X偏移9.848,Y方向偏移1.736A旋轉10.0這就偏差的換算。表面上是工具的X方向 偏差,但是如果你想消除這個偏差你需要改變TOOL坐標的X,Y,和
KUKA機器人之PFO飛行焊控制
機器人在執(zhí)行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA 用戶程序記錄焊道的程序號,焊點號,焊道圖形屬性和坐標值,然后存到PFO應用軟件數據庫里。
KUKA C4機器人的軌跡BASE與TOOL坐標
。 WORLD 世界坐標系 在供貨狀態(tài)下與?ROBROOT坐標系中一致。 可以從機器人足部 “ 向外移出 ”。 說明世界坐標系在?ROBROOT?坐標系中的
使用LabVIEW的鼠標坐標反饋
當事件發(fā)生時,鼠標的位置坐標是很重要的信息,有時我們也需要提取鼠標坐標的歷史軌跡來作為分析問題的工具,通過實驗軟件得到鼠標當前處于屏幕中的坐標位置
發(fā)表于 02-24 08:00
?26次下載
KUKA系統函數FORWARD()是如何計算空間中笛卡爾位置的
功能 FORWARD 從機器人和附加軸的軸角度中計算空間中的笛卡爾位置 (基坐標系)。
小編科普一下KUKA C4機器人軌跡BASE與TOOL坐標系
是一個可自由定義、用戶定制的坐標系說明基坐標在世界坐標系中的位置。用于測量工件和裝置。





 工商網監(jiān)
工商網監(jiān)
評論