 什么是SPI?SPI設備選擇
什么是SPI?SPI設備選擇
什么是SPI
SPI 是英語Serial Peripheral interface的縮寫,顧名思義就是串行外圍設備接口。是Motorola(摩托羅拉)首先在其MC68HCXX系列處理器上定義的。
SPI,是一種高速的,全雙工,同步的通信總線,并且在芯片的管腳上只占用四根線,節約了芯片的管腳,同時為PCB的布局上節省空間,提供方便,主要應用在 EEPROM,FLASH,實時時鐘,AD轉換器,還有數字信號處理器和數字信號解碼器之間。
SPI主從模式
SPI分為主、從兩種模式,一個SPI通訊系統需要包含一個(且只能是一個)主設備,一個或多個從設備。提供時鐘的為主設備(Master),接收時鐘的設備為從設備(Slave),SPI接口的讀寫操作,都是由主設備發起。當存在多個從設備時,通過各自的片選信號進行管理。
SPI是全雙工且SPI沒有定義速度限制,一般的實現通常能達到甚至超過10 Mbps
SPI信號線
SPI接口一般使用四條信號線通信:
SDI(數據輸入),SDO(數據輸出),SCK(時鐘),CS(片選)
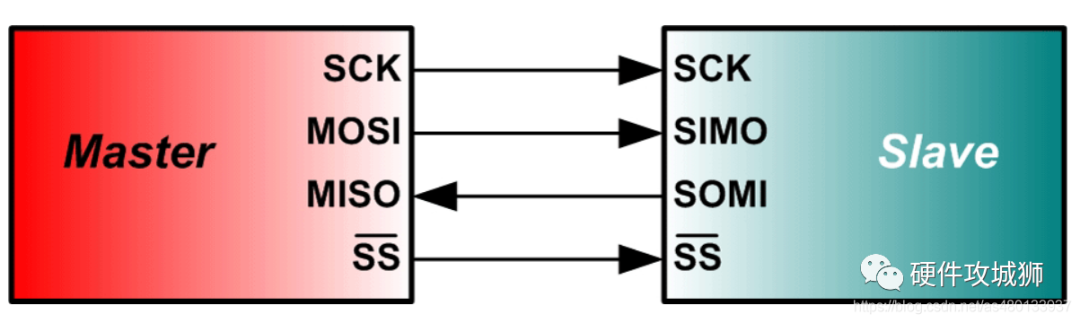
MISO:主設備輸入/從設備輸出引腳。該引腳在從模式下發送數據,在主模式下接收數據。
MOSI:主設備輸出/從設備輸入引腳。該引腳在主模式下發送數據,在從模式下接收數據。
SCLK:串行時鐘信號,由主設備產生。
CS/SS:從設備片選信號,由主設備控制。它的功能是用來作為“片選引腳”,也就是選擇指定的從設備,讓主設備可以單獨地與特定從設備通訊,避免數據線上的沖突。
硬件上為4根線。
SPI一對一
SPI一對多
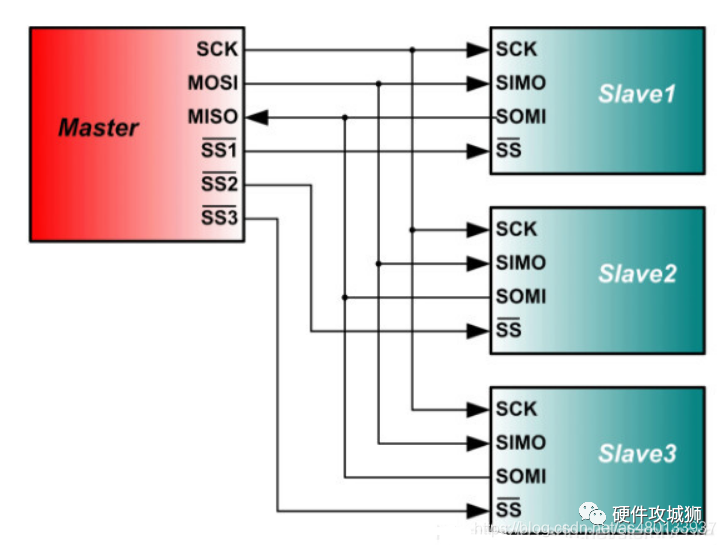
SPI設備選擇
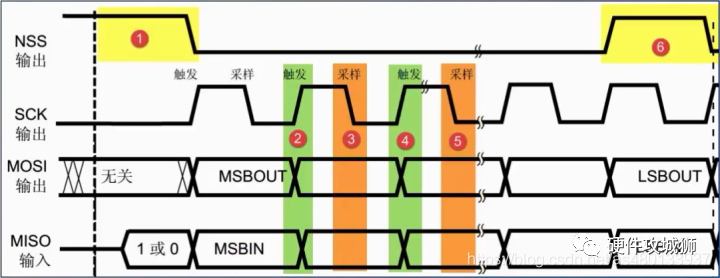
SPI是[單主設備( single-master )]通信協議,這意味著總線中的只有一支中心設備能發起通信。當SPI主設備想讀/寫[從設備]時,它首先拉低[從設備]對應的SS線(SS是低電平有效),接著開始發送工作脈沖到時鐘線上,在相應的脈沖時間上,[主設備]把信號發到MOSI實現“寫”,同時可對MISO采樣而實現“讀”,如下圖:
SPI數據發送接收
SPI主機和從機都有一個串行移位寄存器,主機通過向它的SPI串行寄存器寫入一個字節來發起一次傳輸。
首先拉低對應SS信號線,表示與該設備進行通信
主機通過發送SCLK時鐘信號,來告訴從機寫數據或者讀數據
這里要注意,SCLK時鐘信號可能是低電平有效,也可能是高電平有效,因為SPI有四種模式,這個我們在下面會介紹
主機(Master)將要發送的數據寫到發送數據緩存區(Menory),緩存區經過移位寄存器(0~7),串行移位寄存器通過MOSI信號線將字節一位一位的移出去傳送給從機,,同時MISO接口接收到的數據經過移位寄存器一位一位的移到接收緩存區。
從機(Slave)也將自己的串行移位寄存器(0~7)中的內容通過MISO信號線返回給主機。同時通過MOSI信號線接收主機發送的數據,這樣,兩個移位寄存器中的內容就被交換。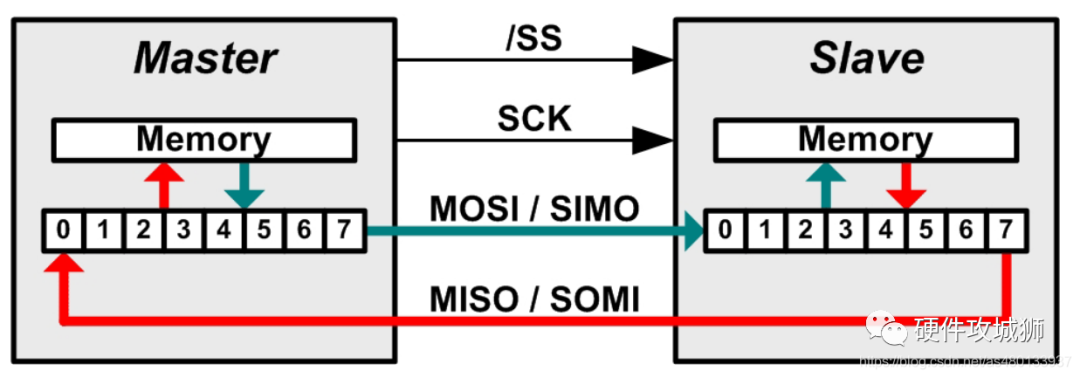
SPI只有主模式和從模式之分,沒有讀和寫的說法,外設的寫操作和讀操作是同步完成的。如果只進行寫操作,主機只需忽略接收到的字節;反之,若主機要讀取從機的一個字節,就必須發送一個空字節來引發從機的傳輸。也就是說,你發一個數據必然會收到一個數據;你要收一個數據必須也要先發一個數據。
SPI通信的四種模式
SPI的四種模式,簡單地講就是設置SCLK時鐘信號線的那種信號為有效信號
SPI通信有4種不同的操作模式,不同的從設備可能在出廠是就是配置為某種模式,這是不能改變的;但我們的通信雙方必須是工作在同一模式下,所以我們可以對我們的主設備的SPI模式進行配置,通過CPOL(時鐘極性)和CPHA(時鐘相位)來
控制我們主設備的通信模式,具體如下:
時鐘極性(CPOL)定義了時鐘空閑狀態電平:
CPOL=0,表示當SCLK=0時處于空閑態,所以有效狀態就是SCLK處于高電平時
CPOL=1,表示當SCLK=1時處于空閑態,所以有效狀態就是SCLK處于低電平時
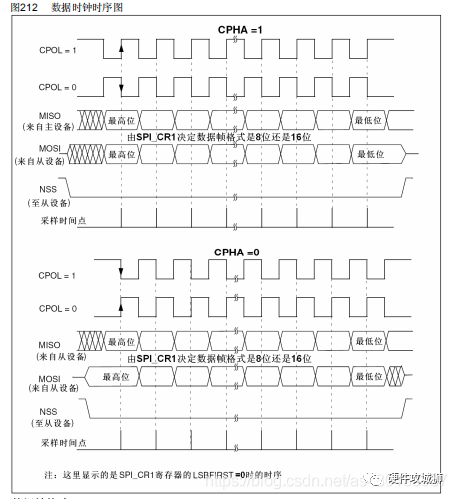
時鐘相位(CPHA)定義數據的采集時間。
CPHA=0,在時鐘的第一個跳變沿(上升沿或下降沿)進行數據采樣。,在第2個邊沿發送數據
CPHA=1,在時鐘的第二個跳變沿(上升沿或下降沿)進行數據采樣。,在第1個邊沿發送數據
例如:
Mode0:CPOL=0,CPHA=0:此時空閑態時,SCLK處于低電平,數據采樣是在第1個邊沿,也就是SCLK由低電平到高電平的跳變,所以數據采樣是在上升沿(準備數據),(發送數據)數據發送是在下降沿。
Mode1:CPOL=0,CPHA=1:此時空閑態時,SCLK處于低電平,數據發送是在第1個邊沿,也就是SCLK由低電平到高電平的跳變,所以數據采樣是在下降沿,數據發送是在上升沿。
Mode2:CPOL=1,CPHA=0:此時空閑態時,SCLK處于高電平,數據采集是在第1個邊沿,也就是SCLK由高電平到低電平的跳變,所以數據采集是在下降沿,數據發送是在上升沿。
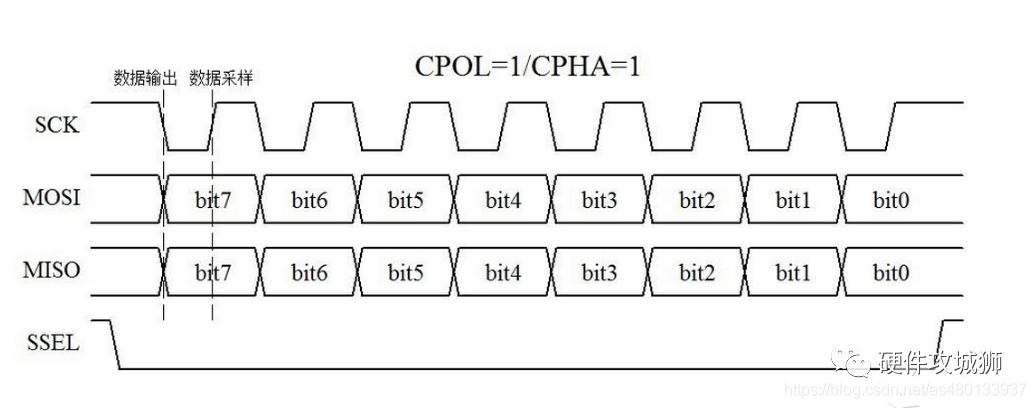
Mode3:CPOL=1,CPHA=1:此時空閑態時,SCLK處于高電平,數據發送是在第1個邊沿,也就是SCLK由高電平到低電平的跳變,所以數據采集是在上升沿,數據發送是在下降沿。

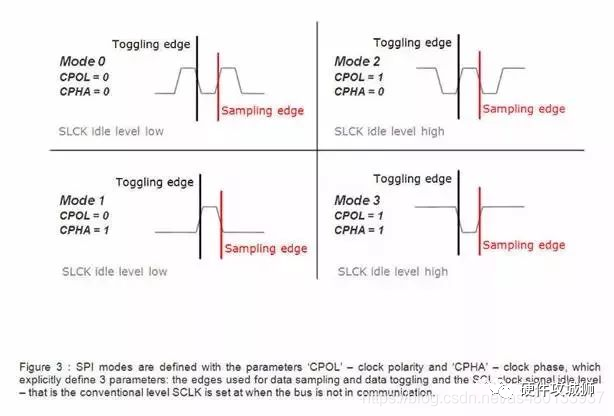
它們的區別是定義了在時鐘脈沖的哪條邊沿轉換(toggles)輸出信號,哪條邊沿采樣輸入信號,還有時鐘脈沖的穩定電平值(就是時鐘信號無效時是高還是低)。每種模式由一對參數刻畫,它們稱為時鐘極(clock polarity)CPOL與時鐘期(clock phase)CPHA。
SPI的通信協議
主從設備必須使用相同的工作模式——SCLK、CPOL 和 CPHA,才能正常工作。如果有多個從設備,并且它們使用了不同的工作模式,那么主設備必須在讀寫不同從設備時需要重新修改對應從設備的模式。以上SPI總線協議的主要內容。
是不是感覺,這就完了?SPI就是如此,他沒有規定最大傳輸速率,沒有地址方案,也沒規定通信應答機制,沒有規定流控制規則。
只要四根信號線連接正確,SPI模式相同,將CS/SS信號線拉低,即可以直接通信,一次一個字節的傳輸,讀寫數據同時操作,這就是SPI
些通信控制都得通過SPI設備自行實現,SPI并不關心物理接口的電氣特性,例如信號的標準電壓。
PS:這也是SPI接口的一個缺點:沒有指定的流控制,沒有應答機制確認是否接收到數據。
SPI的三種模式
SPI工作在3中模式下,分別是運行、等待和停止。
運行模式(Run Mode)
這是基本的操作模式
等待模式(Wait Mode)
SPI工作在等待模式是一種可配置的低功耗模式,可以通過SPICR2寄存器的SPISWAI位進行控制。在等待模式下,如果SPISWAI位清0,SPI操作類似于運行模式。如果SPISWAI位置1,SPI進入低功耗狀態,并且SPI時鐘將關閉。如果SPI配置為主機,所有的傳輸將停止,但是會在CPU進入運行模式后重新開始。如果SPI配置為從機,會繼續接收和傳輸一個字節,這樣就保證從機與主機同步。
停止模式(Stop Mode)
為了降低功耗,SPI在停止模式是不活躍的。如果SPI配置為主機,正在進行的傳輸會停止,但是在CPU進入運行模式后會重新開始。如果SPI配置為從機,會繼續接受和發送一個字節,這樣就保證了從機與主機同步。
SPI原理圖連接
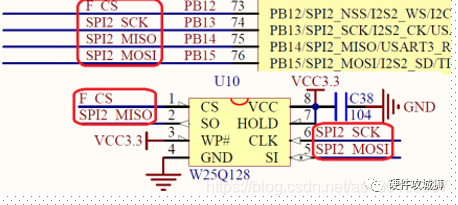
**
STM32中SPI初始化配置
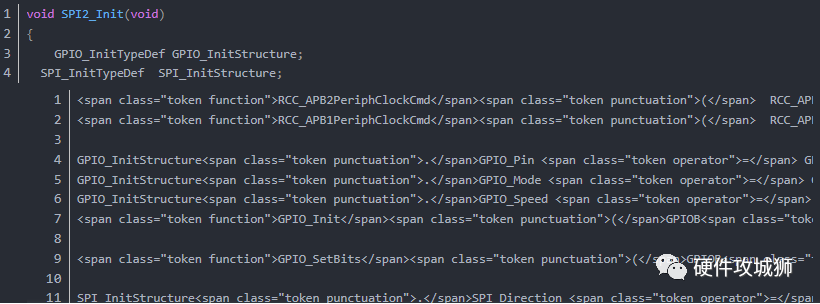
1.初始化GPIO口,配置相關引腳的復用功能,使能SPIx時鐘。調用函數:void GPIO_Init();
2.使能SPI時鐘總線:RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE)
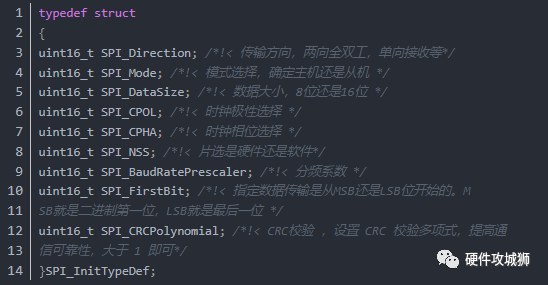
3.配置SPI初始化的參數,設置SPI工作模式:SPI_Init(SPI1,&SPI_Initstructure)
4.使能SPI外設:SPI_Cmd(SPI1,ENABLE);
SPI配置設置

}
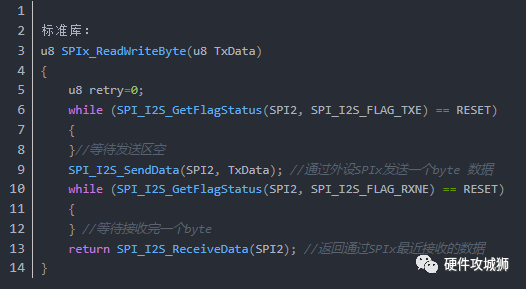
SPI發送函數(標準庫/HAL庫)
HLA庫:
uint8_tSPI_SendByte(uint8_t byte)
{
uint8_t d_read,d_send=byte;
if(HAL_SPI_TransmitReceive(&hspi1,&d_send,&d_read,1,0xFFFFFF)!=HAL_OK)
d_read=0XFF;
returnd_read;
-
解碼器
+關注
關注
9文章
1143瀏覽量
40742 -
SPI
+關注
關注
17文章
1706瀏覽量
91585 -
信號處理器
+關注
關注
1文章
254瀏覽量
25275
原文標題:講得太太太詳細了,SPI原理,值得一看!
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問哪些PSoC 4000設備支持I2C、SPI和UART?
SPI接口的應用與基于FPGA的SPI自動發送模塊設計

什么是SPI、I2C、UART?它們有什么特點?有什么區別?
淺談Zynq實現SPI接口設計
SPI和IIC、IIS、UART、CAN、SDIO、GPIO總線的詳細資料簡介
SPI檢測是什么,SPI檢測設備的作用又是什么
SPI、UART、IIC總線之間有什么區別與聯系
STM32F429入門(二十一):SPI協議及SPI讀寫FLASH

SPI子系統:SPI設備驅動





 工商網監
工商網監
評論