") 2020-2030年中國(guó)智能電動(dòng)汽車自動(dòng)駕駛滲透率情況
2020-2030年中國(guó)智能電動(dòng)汽車自動(dòng)駕駛滲透率情況
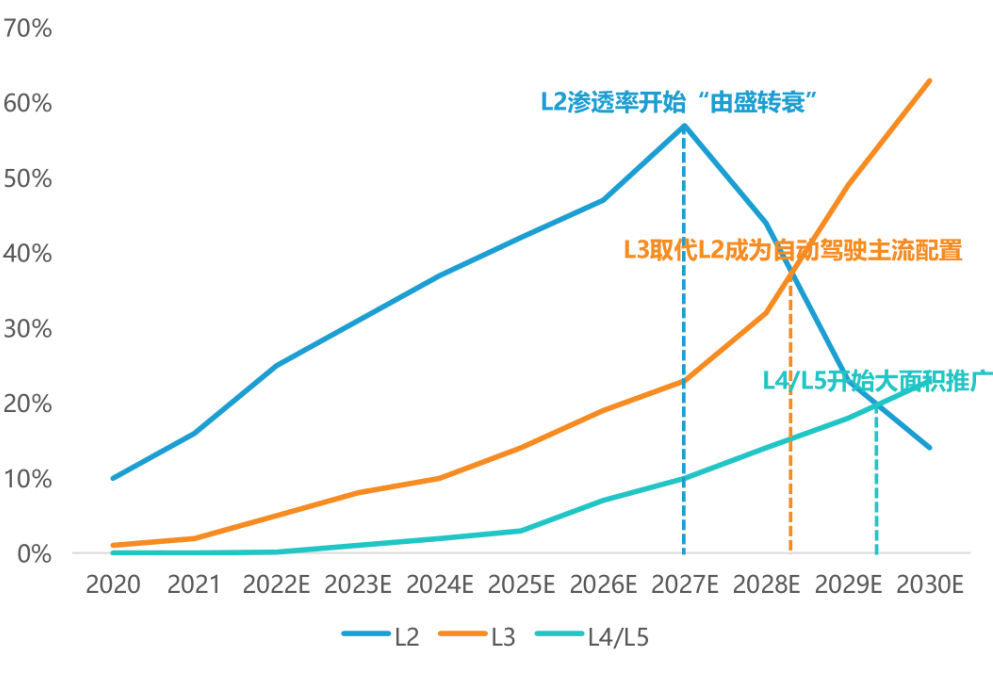
2022年,盡管全球政治經(jīng)濟(jì)環(huán)境充滿了極大的不確定性,但汽車的兩大技術(shù)引擎“電動(dòng)化”和“智能化”依然帶動(dòng)產(chǎn)業(yè)進(jìn)入全新的高速增長(zhǎng)階段。
其中2022年L2級(jí)自動(dòng)駕駛滲透率預(yù)計(jì)超過25%,這一增長(zhǎng)態(tài)勢(shì)將持續(xù)到2027年。
億歐智庫:
2020-2030年中國(guó)智能電動(dòng)汽車自動(dòng)駕駛滲透率情況
針對(duì)逆勢(shì)增長(zhǎng)的產(chǎn)業(yè)趨勢(shì),10月26日,億歐汽車舉行了量產(chǎn)為王-GTM2022智能駕駛功能量產(chǎn)應(yīng)用線上沙龍暨報(bào)告發(fā)布會(huì),智駕科技MAXIEYE作為功能量產(chǎn)應(yīng)用代表參編《2022中國(guó)智能駕駛功能量產(chǎn)應(yīng)用研究報(bào)告》(以下簡(jiǎn)稱“報(bào)告”),公司副總裁兼運(yùn)營(yíng)總監(jiān)楊騰飛受邀參與圓桌對(duì)話,以量產(chǎn)一線的視角分享關(guān)于產(chǎn)業(yè)現(xiàn)狀的見解及未來趨勢(shì)洞察。
八大核心觀點(diǎn)(劃重點(diǎn))
?
L2到L2++迎來量產(chǎn)井噴,不要高估消費(fèi)者的購(gòu)買力,也不要低估L2規(guī)模化的速度
?
功能上車規(guī)模化與數(shù)據(jù)體系同步加速,二者缺一不可
?
供應(yīng)商進(jìn)入與C端用戶“直接對(duì)話”、與B端客戶共同定義產(chǎn)品的時(shí)代
?
產(chǎn)業(yè)價(jià)值價(jià)評(píng)估體系從 “技術(shù)論”走向“產(chǎn)品市場(chǎng)論”
?
性價(jià)比將決定AI+汽車能否載入科技文明的史冊(cè)
?
行業(yè)面臨共同議題:以安全和體驗(yàn)促進(jìn)智能駕駛的全民認(rèn)知度和選擇意愿
?
行泊一體將帶來更符合用戶需求的高低速駕乘場(chǎng)景體驗(yàn)
?
數(shù)據(jù)驅(qū)動(dòng)自學(xué)習(xí)系統(tǒng)將是高階自動(dòng)駕駛的分水嶺
功能上車
組合駕駛輔助聚焦量產(chǎn)性價(jià)比
2021年8月,中國(guó)市場(chǎng)監(jiān)管總局發(fā)布國(guó)家標(biāo)準(zhǔn)的《汽車駕駛自動(dòng)化分級(jí)》,2022年3月正式實(shí)施。
不同于SAE的分級(jí),國(guó)標(biāo)將汽車駕駛自動(dòng)化分為0-5級(jí),分別是:應(yīng)急輔助、部分駕駛輔助、組合駕駛輔助、有條件自動(dòng)駕駛、高度自動(dòng)駕駛以及完全自動(dòng)駕駛。
各級(jí)別智能駕駛典型功能
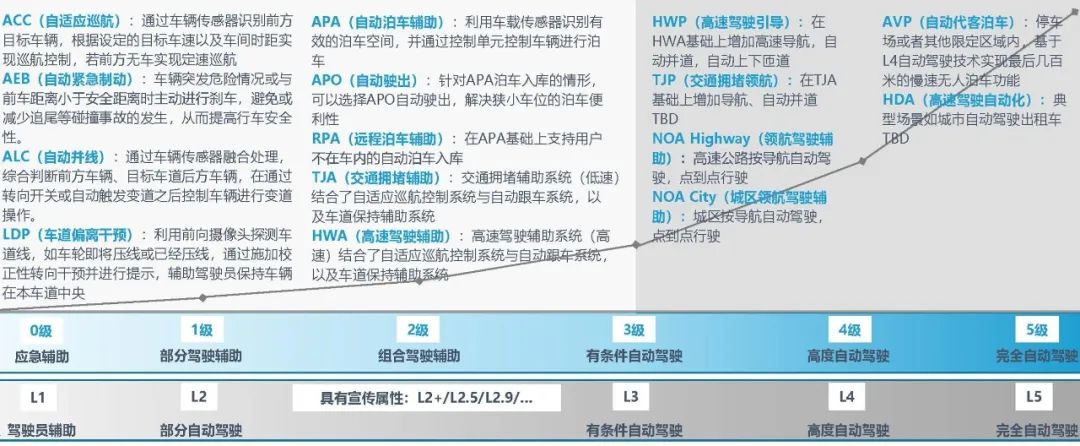
根據(jù)各級(jí)功能滲透率數(shù)據(jù)分析,目前國(guó)內(nèi)智能駕駛產(chǎn)業(yè)正處于由組合駕駛輔助向有條件自動(dòng)駕駛的過渡階段,即L2到L3之間。
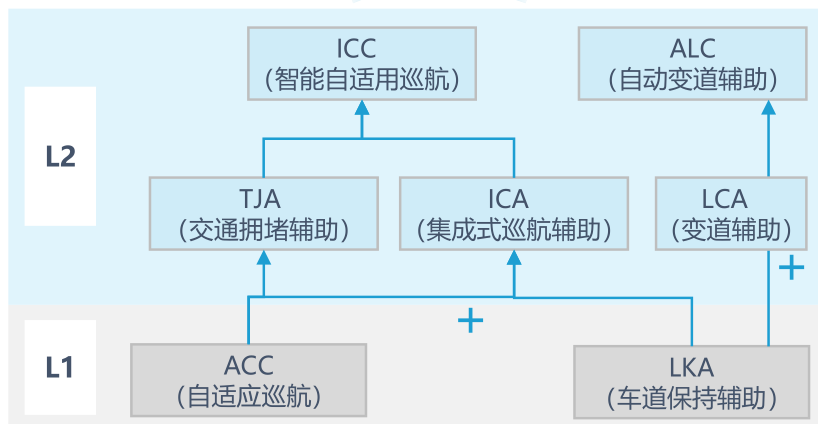
從實(shí)現(xiàn)功能和傳感器配置上來看,基于單視覺的1VnR方案可支持實(shí)現(xiàn)L2級(jí)橫縱向融合控制功能,該方案的特點(diǎn)是基于前視系統(tǒng)實(shí)現(xiàn)融合控制,在傳感器和算力上具有高性價(jià)比的特點(diǎn)。
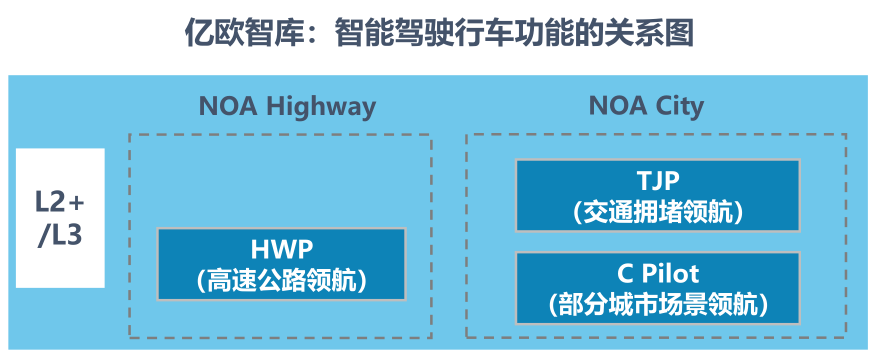
在L2++級(jí)別的功能中,領(lǐng)航輔助類功能是智能行車高階方案的發(fā)力點(diǎn),目前有少數(shù)車型裝配,明年量產(chǎn)效應(yīng)將更加明顯。同時(shí)由于不同企業(yè)在ADAS功能定義中略有區(qū)別,此次億歐報(bào)告對(duì)相關(guān)功能進(jìn)行了如下梳理:

智駕科技MAXIEYE的對(duì)應(yīng)方案如下:
MAXIPILOT1.0全速智能巡航系統(tǒng)
1V1R1V3R視覺一體機(jī)方案,覆蓋AEB自動(dòng)緊急制動(dòng)、TJA擁堵輔助、LCC居中控制等L2級(jí)橫縱向控制功能
MAXIPILOT1.0PLUS NOM領(lǐng)航輔助系統(tǒng)
1V5R視覺一體機(jī)方案,在L2基礎(chǔ)上實(shí)現(xiàn)L2++級(jí)高速場(chǎng)景點(diǎn)到點(diǎn)領(lǐng)航輔助駕駛
MAXIPILOT2.0 行泊一體系統(tǒng)
nVnR域控方案,實(shí)現(xiàn)行車(含領(lǐng)航輔助)和泊車功能的高度融合
但無論L2還是L2++,在量產(chǎn)這件事上,性價(jià)比已經(jīng)成為產(chǎn)業(yè)的基礎(chǔ)共識(shí)。而隨著量產(chǎn)進(jìn)程的加速,自動(dòng)駕駛系統(tǒng)的安全性問題也被放大,行業(yè)重新審視系統(tǒng)邊界和運(yùn)行穩(wěn)定性問題。
性能解碼
全棧視角下的安全和體驗(yàn)
如何評(píng)價(jià)一套成熟可量產(chǎn)且好用的ADAS系統(tǒng)?智駕科技MAXIEYE提出從安全和體驗(yàn)的維度提升產(chǎn)品性能。
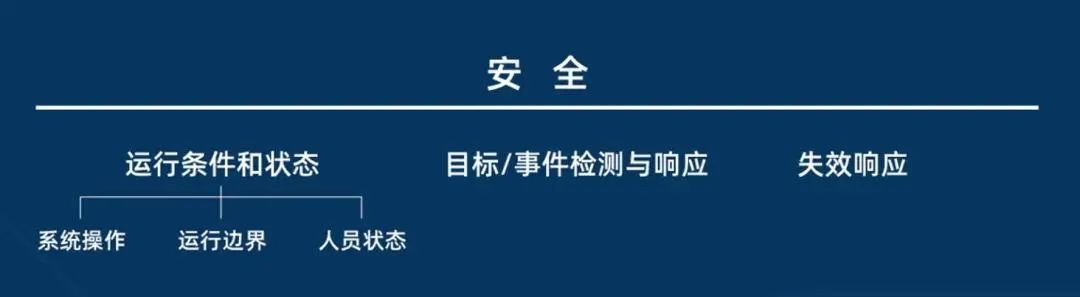
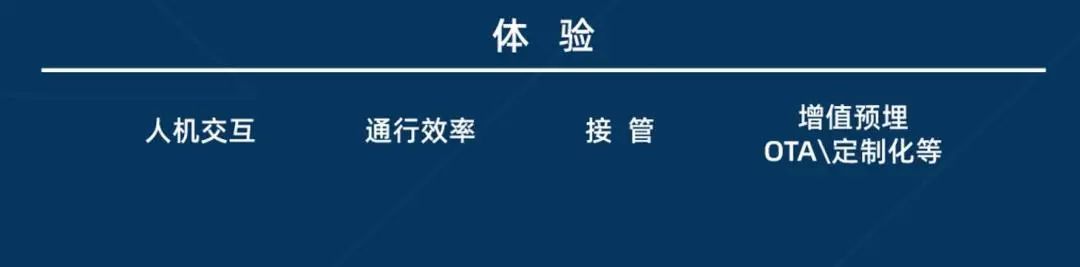
安全維度包括系統(tǒng)運(yùn)行條件和狀態(tài),如操作系統(tǒng)狀態(tài)、系統(tǒng)運(yùn)行邊界、人員狀態(tài);目標(biāo)/事件檢測(cè)與響應(yīng)機(jī)制,系統(tǒng)失效響應(yīng)及安全冗余等。體驗(yàn)維度則包括人機(jī)交互;通行效率;接管率;增值預(yù)設(shè)等等。
技術(shù)上如何實(shí)現(xiàn)?智駕科技MAXIEYE提出從感知到規(guī)控全棧技術(shù)鏈進(jìn)行協(xié)同創(chuàng)新,層依托圖像像素級(jí)原始真值、泛化場(chǎng)景理解,大幅降低感知與規(guī)控跨平臺(tái)產(chǎn)生的誤差疊加,確保感知的每一步創(chuàng)新都緊貼功能體驗(yàn)的本質(zhì)需求。
如在感知層通過雙網(wǎng)冗余校驗(yàn)降低漏檢誤檢,降低AEB自動(dòng)緊急制動(dòng)系統(tǒng)的誤制動(dòng)和漏制動(dòng),實(shí)現(xiàn)安全護(hù)航的同時(shí),提升駕駛體驗(yàn);
通過視頻流和多幀圖像處理技術(shù),實(shí)現(xiàn)基于單目視覺的4D時(shí)空感知,從空間深度信息到時(shí)間信息,實(shí)現(xiàn)更精準(zhǔn)的航跡預(yù)測(cè);
通過FPP融合路徑規(guī)劃,充分利用周圍環(huán)境信息,對(duì)導(dǎo)航、車道線、車流、護(hù)欄等按優(yōu)先級(jí)進(jìn)行綜合判斷,在高精地圖缺失或?qū)Ш絹G失的情況下,保持系統(tǒng)安全穩(wěn)定的運(yùn)行。
此外,基于全棧的技術(shù)考慮,將更有利于從BEV鳥瞰圖視角下進(jìn)行感知、融合、路徑規(guī)劃的深度學(xué)習(xí)化,實(shí)現(xiàn)真正意義上數(shù)據(jù)驅(qū)動(dòng)的端到端自動(dòng)駕駛功能開發(fā),進(jìn)一步實(shí)現(xiàn)系統(tǒng)性能質(zhì)的提升。反之,數(shù)據(jù)驅(qū)動(dòng)下也將從感知到規(guī)控,為車廠客戶帶來全方位的技術(shù)和產(chǎn)品性能升級(jí)。
增值預(yù)埋
數(shù)據(jù)驅(qū)動(dòng)的高階自動(dòng)駕駛
功能量產(chǎn)的同時(shí),另一產(chǎn)業(yè)趨勢(shì)也很明顯:搭建數(shù)據(jù)閉環(huán),利用高頻使用場(chǎng)景,建立高階自動(dòng)駕駛的數(shù)據(jù)智能引擎。
從智駕科技MAXIEYE角度,建立數(shù)據(jù)智能引擎的核心內(nèi)容包括幾個(gè)方面:
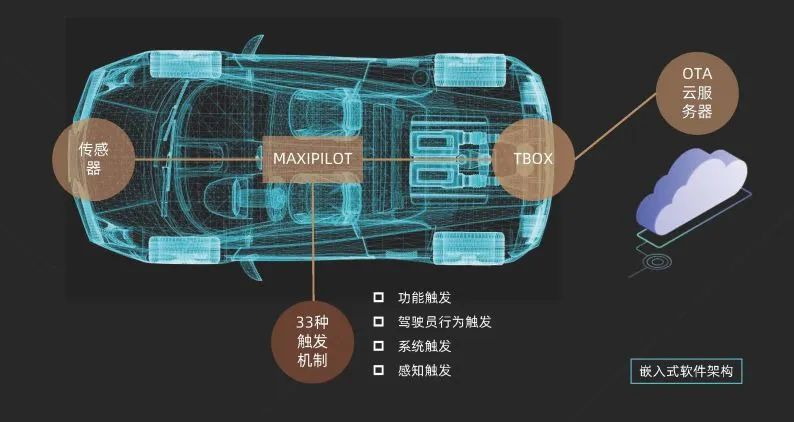
建立數(shù)據(jù)閉環(huán)。隨量產(chǎn)系統(tǒng)部署數(shù)據(jù)回傳機(jī)制,目前已設(shè)置33種場(chǎng)景觸發(fā)機(jī)制(持續(xù)增加中),包括功能觸發(fā)、駕駛員行為觸發(fā)、系統(tǒng)觸發(fā)、感知觸發(fā)等全方位數(shù)據(jù),構(gòu)建車云一體的有效場(chǎng)景庫及OTA軟件升級(jí)鏈路。
構(gòu)建數(shù)據(jù)智能 -數(shù)據(jù)閉環(huán)的實(shí)現(xiàn)
搭建真值系統(tǒng)和自動(dòng)化數(shù)據(jù)標(biāo)注體系。基于地圖真值、目標(biāo)真值、路徑真值,實(shí)現(xiàn)自動(dòng)化數(shù)據(jù)標(biāo)注,讓神經(jīng)網(wǎng)絡(luò)模型和算法實(shí)現(xiàn)自學(xué)習(xí)。
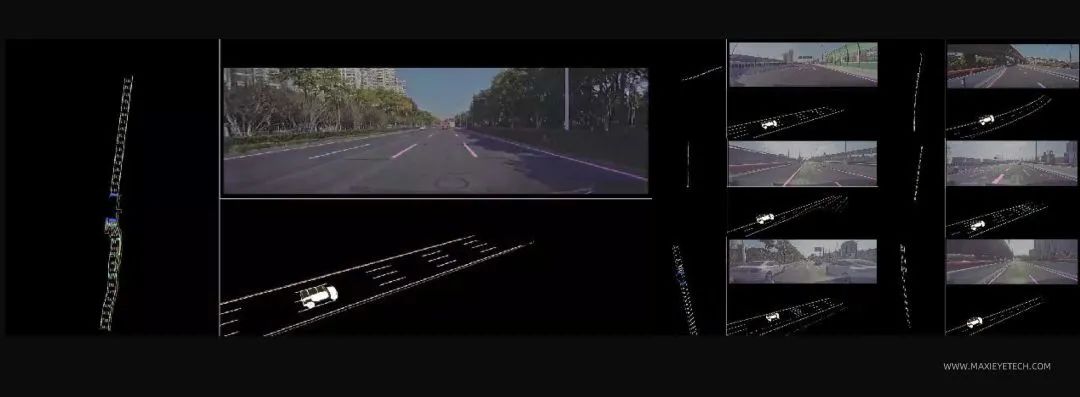
基于BEV鳥瞰圖實(shí)現(xiàn)端到端自動(dòng)駕駛系統(tǒng)開發(fā)。在BEV視角下做感知到規(guī)控的全棧技術(shù)架構(gòu)設(shè)計(jì),將讓自動(dòng)駕駛系統(tǒng)從分層式集成開發(fā)走向端到端開發(fā),改變傳統(tǒng)多目標(biāo)檢測(cè)中基于離散模型疊加推理的信息丟失情況,時(shí)序融合有效解決遮擋目標(biāo)問題,降低后處理復(fù)雜邏輯帶來的潛在問題,讓整個(gè)技術(shù)架構(gòu)更加輕量高效,同時(shí)可實(shí)現(xiàn)精準(zhǔn)的視覺里程計(jì)、建圖等功能。
構(gòu)建數(shù)據(jù)智能 -
BEV視角下的高階自動(dòng)駕駛系統(tǒng)開發(fā)
從全棧創(chuàng)新到數(shù)據(jù)驅(qū)動(dòng),也將支撐智駕科技MAXIEYE從當(dāng)前量產(chǎn)到未來高階自動(dòng)駕駛,可持續(xù)性地踐行極致性價(jià)比、人人可享的智能駕駛的產(chǎn)品理念。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2552文章
51340瀏覽量
755511 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2569瀏覽量
48839 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13910瀏覽量
166760
原文標(biāo)題:2022智能駕駛量產(chǎn)報(bào)告 | 上量才是王道,安全永不過時(shí)
文章出處:【微信號(hào):maxieye2015,微信公眾號(hào):智駕科技MAXIEYE】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
自動(dòng)駕駛汽車安全嗎?

Lucid CEO:自動(dòng)駕駛汽車預(yù)計(jì)到2030年才會(huì)普及
助力中國(guó)電動(dòng)汽車制造商全球擴(kuò)張
索尼本田移動(dòng)公司合作開發(fā)AI自動(dòng)駕駛電動(dòng)車
中國(guó)電動(dòng)車企競(jìng)相角逐自動(dòng)駕駛領(lǐng)域,向特斯拉發(fā)起技術(shù)挑戰(zhàn)
車廠如何安全有效做自動(dòng)駕駛路測(cè)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論