") OpenDRIVE高精地圖的介紹&應(yīng)用
OpenDRIVE高精地圖的介紹&應(yīng)用
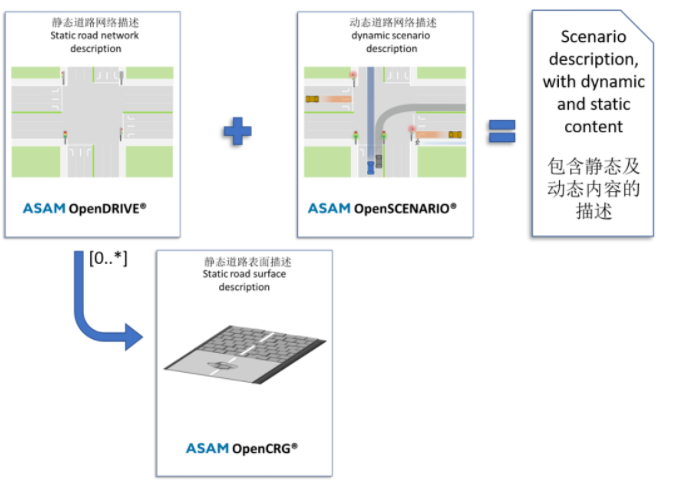
01 1.1 概述 精確數(shù)字化是數(shù)字道路數(shù)據(jù)生產(chǎn)的基礎(chǔ) 高精地圖所蘊(yùn)含的信息豐富,含有道路類型、曲率、車道線位置等道路信息,以及路邊基礎(chǔ)設(shè)施、障礙物、交通標(biāo)志等環(huán)境對象信息,同時包括交通流量、紅綠燈狀態(tài)信息等實時動態(tài)信息,采集及運(yùn)用高精度數(shù)據(jù)均基于OpenDRIVE。 OpenDRIVE開發(fā)起因是VIRES公司在提供駕駛模擬器方案時,發(fā)現(xiàn)不同工具的道路數(shù)據(jù)格式中需要包含邏輯內(nèi)容是基本一致的,為了方便在不同的駕駛模擬器間進(jìn)行道路數(shù)據(jù)的傳遞,VIRES公司與Daimler Driving Simulator部門決定開發(fā)OpenDRIVE格式。轉(zhuǎn)交給ASAM組織后,ASAM組織同樣把OpenDRIVE定位為用于仿真測試的地圖格式。OpenDRIVE是OpenX中眾多標(biāo)準(zhǔn)的一個,主要用于描述路網(wǎng)結(jié)構(gòu),其與Openscenario和Openncrg一起共同描述場景、道路和路面情況,主要應(yīng)用場景是用于仿真。
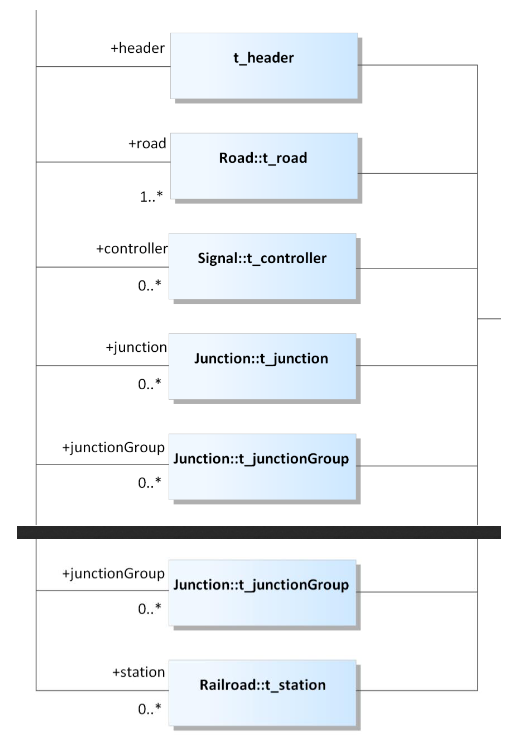
OpenDRIVE中描述的路網(wǎng)可以是人工生成或來自于真實世界。當(dāng)前各大主流廠家均是采用人工和數(shù)據(jù)自動生成的方式來構(gòu)建自己的場景庫,OpenDRIVE的主要目的是提供可用于仿真的路網(wǎng)描述,并使這些路網(wǎng)描述之間可以進(jìn)行交換。 1.2數(shù)據(jù)架構(gòu) 對于OpenDRIVE文件中元素的定義整體架構(gòu)如下圖:
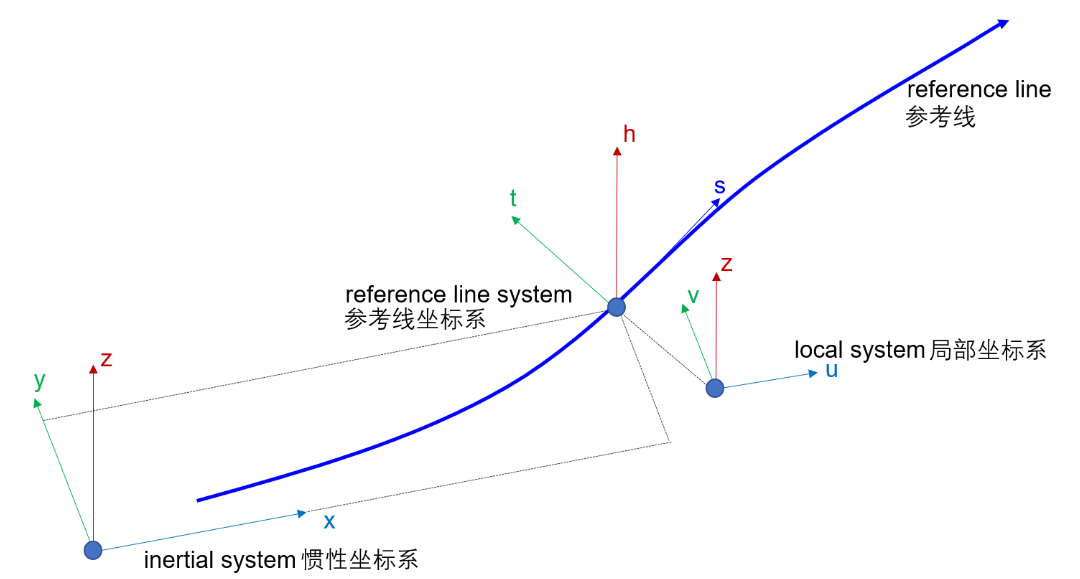
1.3坐標(biāo)系
OpenDRIVE對路網(wǎng)結(jié)構(gòu)的描述中采用以下三種坐標(biāo)系:
- 慣性x/y/z軸坐標(biāo)
- 系參考線s/t/h軸坐標(biāo)系
- 局部u/v/z軸坐標(biāo)系
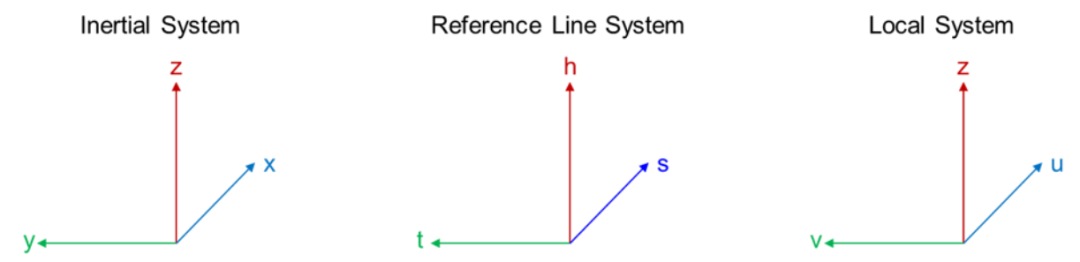
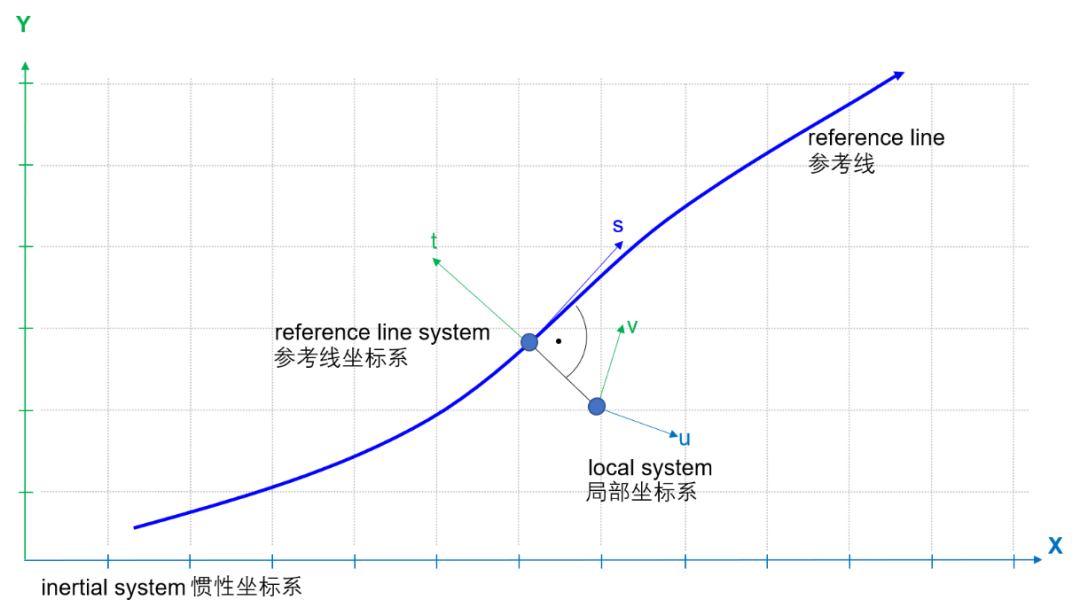
OpenDRIVE中使用的三種坐標(biāo)系 三種坐標(biāo)系之間采用以下的原則來處理:對局部坐標(biāo)系的查找與定位將相對于參考線坐標(biāo)系來進(jìn)行。
 02
OpenDRIVE的對象信息
OpenDRIVE將道路(roads)分為三個部分:道路參考線(reference line)、車道(lanes)和道路設(shè)施(features)。如下圖:
02
OpenDRIVE的對象信息
OpenDRIVE將道路(roads)分為三個部分:道路參考線(reference line)、車道(lanes)和道路設(shè)施(features)。如下圖:
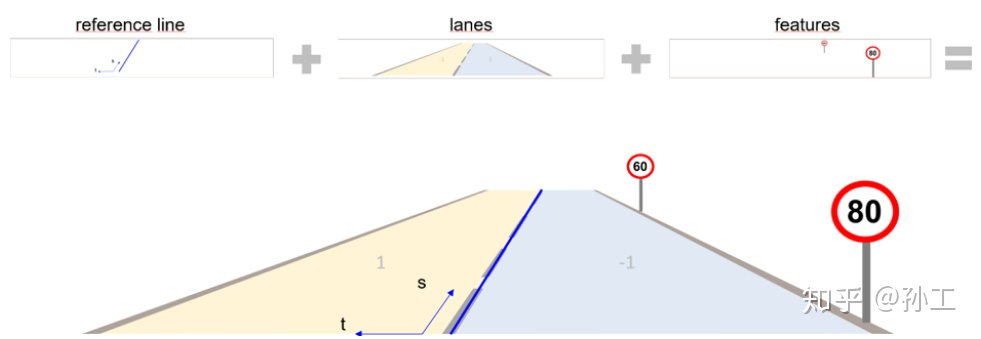
2.1道路參考線(reference line) 道路參考線可以理解為道路中心線在水平面的投影,也就是說道路參考線反映的是道路俯視的形狀,而不包括坡度、起伏等特征。每條道路有且僅有一條道路參考線,該參考線可以由多條曲線連接而成,這些曲線的形式包括:直線、螺旋線、圓弧、三次多項式(不再使用)和三次多項式參數(shù)方程等。如下圖所示:

2.3車道(lanes) 每條道路都可以設(shè)置大于等于一條車道,可以有多條車道,還可以通過設(shè)置不同的車道分段來實現(xiàn)不同區(qū)域的車道數(shù)量和車道寬度的變化,如下圖所示:
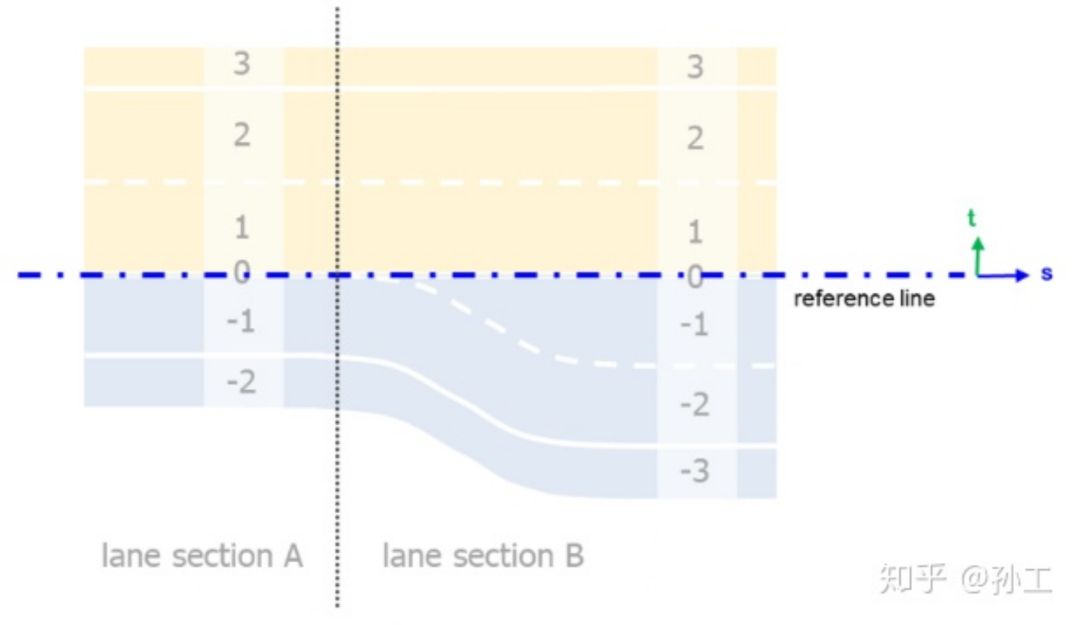
車道可以設(shè)置不同的屬性,包括:寬度、類型、材質(zhì)、限速、路權(quán)、車道線等。車道類型和車道線設(shè)置的示例如下圖所示。

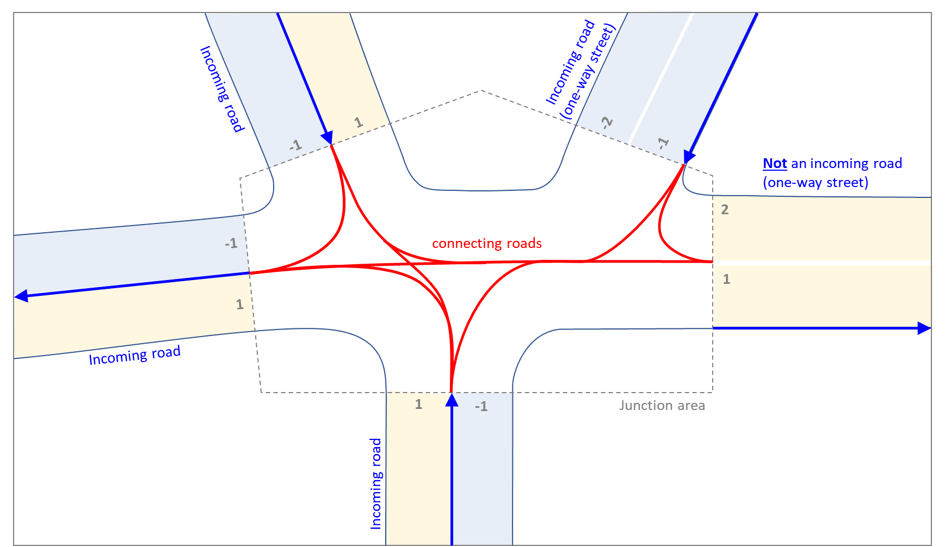
2.4道路設(shè)施(features)
道路設(shè)施包括物體(objects)和交通信號(signals)兩種。物體包括停車位、隧道、橋梁、人行道和路障等類型,通過在道路s-t坐標(biāo)系的位置、朝向和高度等屬性進(jìn)行定義。
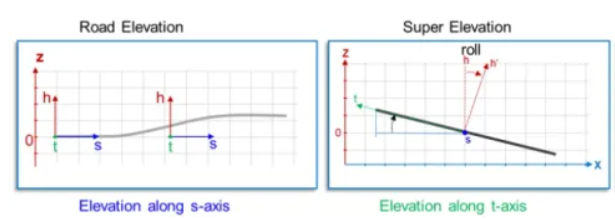
2.5道路高度(elevation)
道路的高度包括縱向坡度、超高等。
03
OpenDRIVE主要應(yīng)用
—全球范圍內(nèi)的汽車應(yīng)用方面, OpenDRIVE主要應(yīng)用于以下六個方面:
- 精確的建設(shè)完成的數(shù)字道路數(shù)據(jù)生產(chǎn)
- 駕駛模擬器應(yīng)用&賽道模擬
- CRG項目的高端曲表面模型
- 賽道
- 多分辨率的試驗場、測試區(qū)和特殊軌道
- 公共道路
- 竣工的公路或主要道路的精確工程測量
- 城市內(nèi)部道路網(wǎng)絡(luò)的精確測量
- 地鐵和隧道測量
- 鐵路
- 機(jī)場
04
OpenDRIVE項目案例
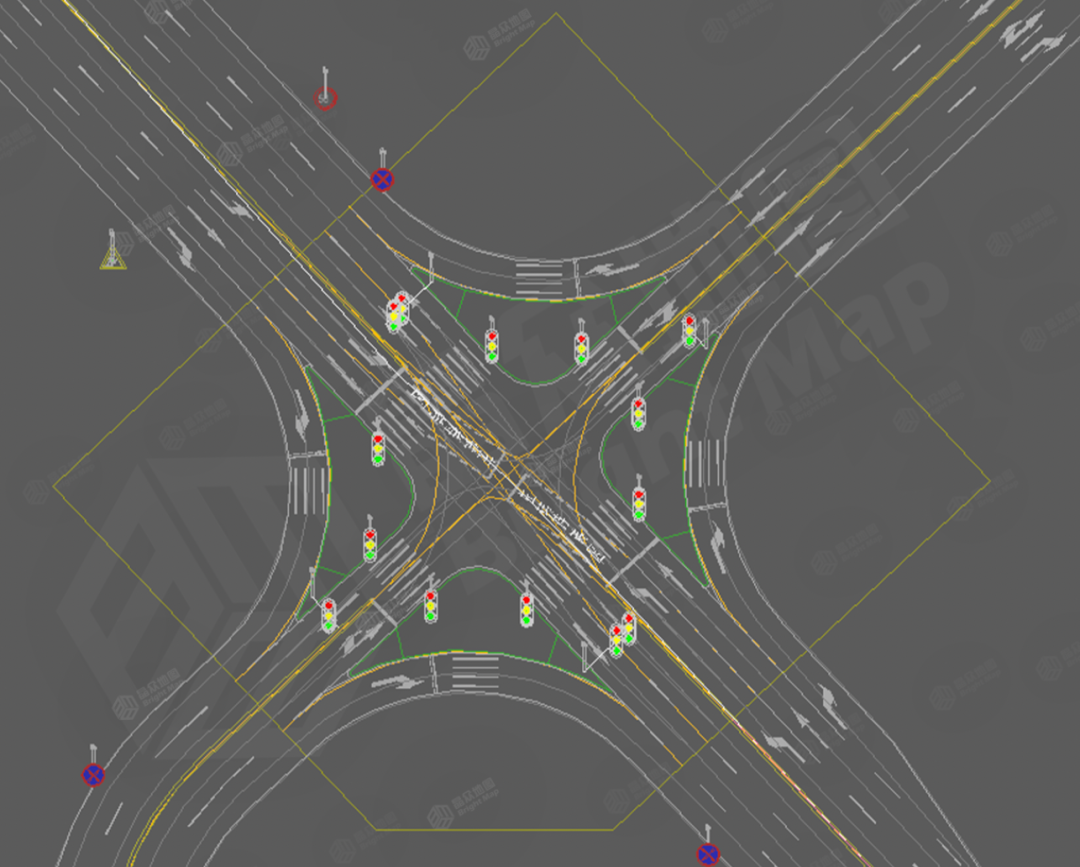
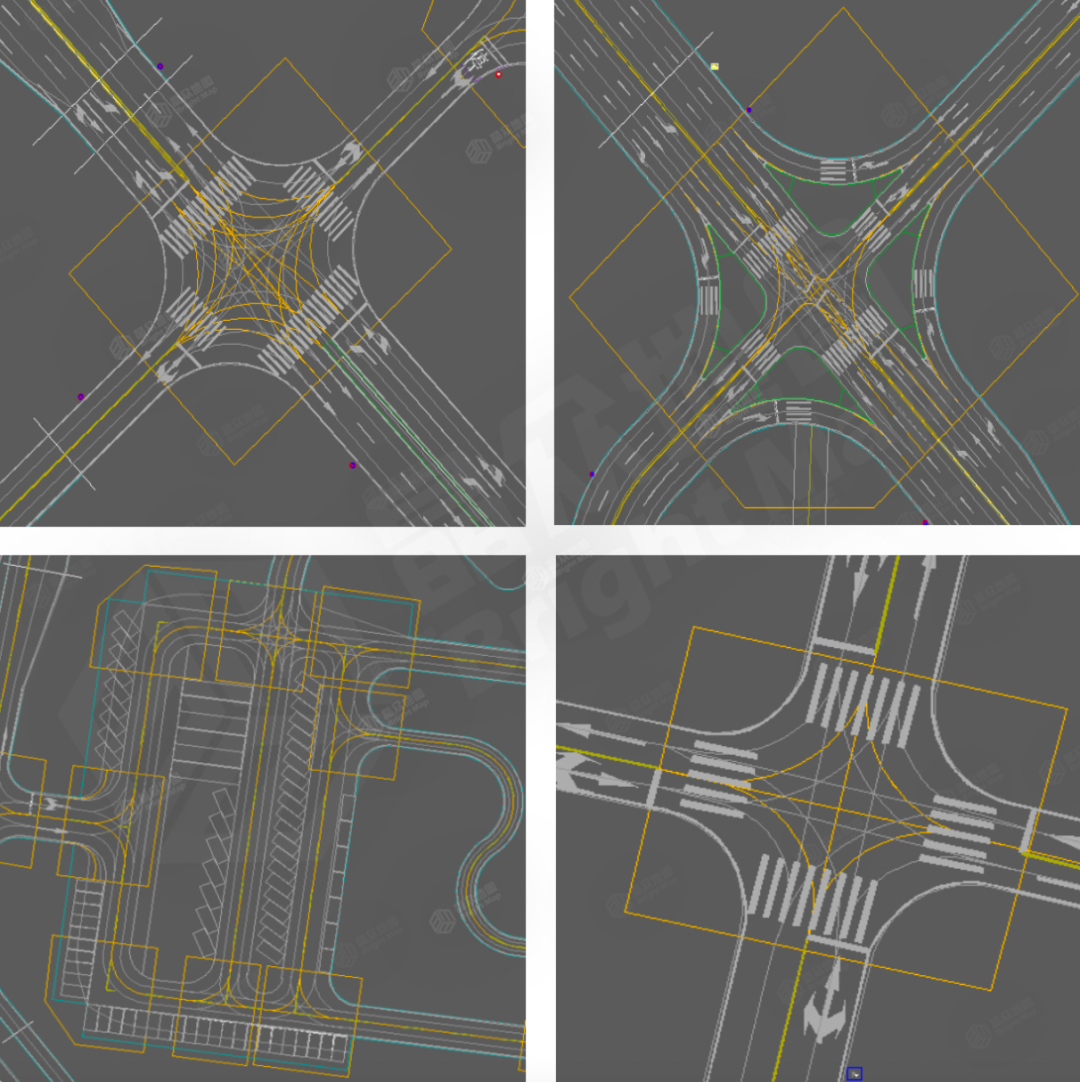
OpenDRIVE格式主要用于仿真和格式交換,晶眾地圖采用修改過的xodr格式對高精地圖進(jìn)行描述,支持OpenDRIVE格式的地圖數(shù)據(jù)導(dǎo)入和導(dǎo)出。
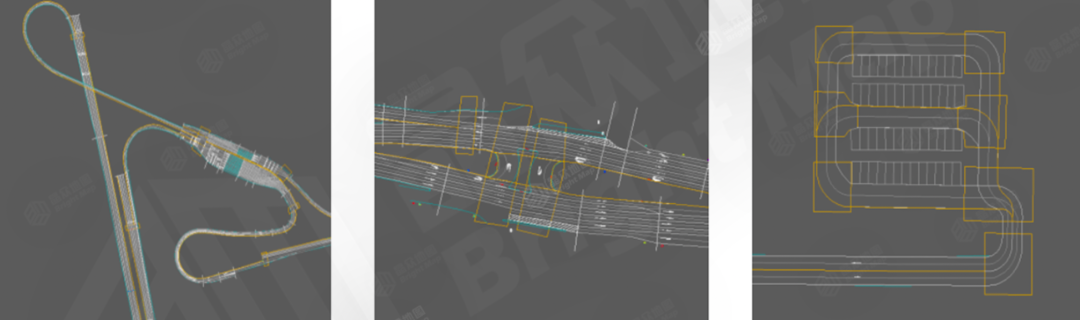
晶眾地圖OpenDRIVE項目案例
—某自動駕駛測試場
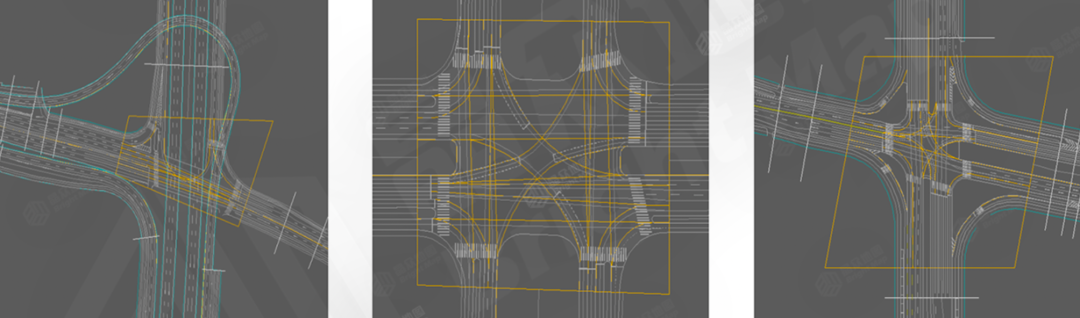
內(nèi)容包括:
|
281道路參考線 |
72路口 |
2352車道 |
3056車道分隔線 |
|
333車道段 |
72停車位 |
607地面箭頭 |
165地面文字 |
|
56停止線 |
81信號燈 |
283道路標(biāo)志標(biāo)牌 |
364支撐桿件 |
|
55綠化帶 |
21安全島 |
667路緣石 |
274道路高程線 |

內(nèi)容包括:
| 442道路參考線 |
49路口 |
996車道 |
|
1459車道分隔線 |
19車道段 |
81停車位 |
|
233地面箭頭 |
11地面文字 |
65停止線 |
|
44人行橫道面 |
270道路高程線 |
...... |
以下界面由某合作伙伴采用晶的地圖和引擎進(jìn)行開發(fā)



審核編輯 :李倩
-
模擬器
+關(guān)注
關(guān)注
2文章
877瀏覽量
43248 -
數(shù)字化
+關(guān)注
關(guān)注
8文章
8763瀏覽量
61838 -
高精地圖
+關(guān)注
關(guān)注
0文章
27瀏覽量
2661
原文標(biāo)題:OpenDRIVE高精地圖的介紹&應(yīng)用
文章出處:【微信號:BrightMap,微信公眾號:晶眾地圖】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
如何判斷產(chǎn)品需不需要做AT&T認(rèn)證?AT&T測試內(nèi)容和要求分享

北美運(yùn)營商AT&amp;amp;T認(rèn)證中的VoLTE測試項
迅為itop-3568開發(fā)板AMP雙系統(tǒng)使用手冊之燒寫AMP鏡像
北美運(yùn)營商AT&amp;amp;T認(rèn)證的費(fèi)用受哪些因素影響

onsemi LV/MV MOSFET 產(chǎn)品介紹 &amp;amp; 行業(yè)應(yīng)用

思瑞浦車規(guī)級產(chǎn)品矩陣,全面覆蓋汽車級CAN&amp;amp;LIN、LDO需求

OC7201C資料(PCB &amp; 原理圖)
FS201資料(pcb &amp; DEMO &amp; 原理圖)
北美運(yùn)營商AT&amp;amp;T認(rèn)證入庫產(chǎn)品范圍名單相關(guān)
自動駕駛仿真測試實踐:高精地圖仿真

解讀北美運(yùn)營商,AT&amp;amp;T的認(rèn)證分類與認(rèn)證內(nèi)容分享
智向未來,2024高通&amp;廣和通邊緣智能技術(shù)進(jìn)化日成功舉辦

Open RAN的未來及其對AT&amp;T的意義
美團(tuán)取得構(gòu)建高精地圖專利
【電磁兼容技術(shù)文檔分享】頻譜儀應(yīng)用案例&amp;amp;簡易探頭的制作






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論