 用HLS實現PID控制器
用HLS實現PID控制器
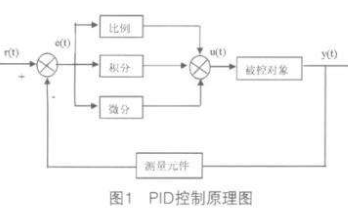
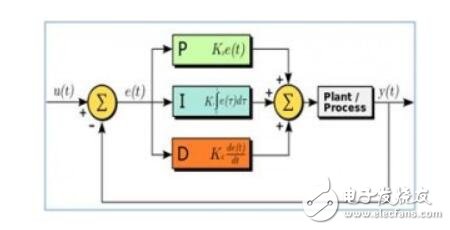
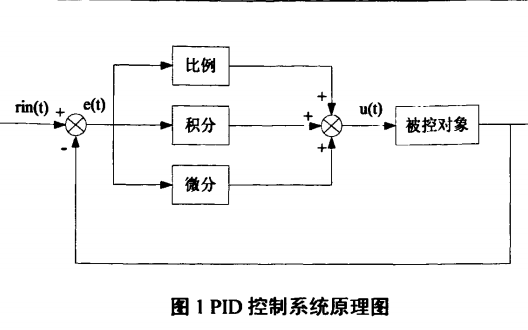
PID控制器(比例-積分-微分控制器),由比例單元(Proportional)、積分單元(Integral)和微分單元(Derivative)構成,可以通過調整這三個單元的增益來調整其特性,如下圖所示。PID控制器主要適用于基本上線性且動態特性不隨時間變化的系統。
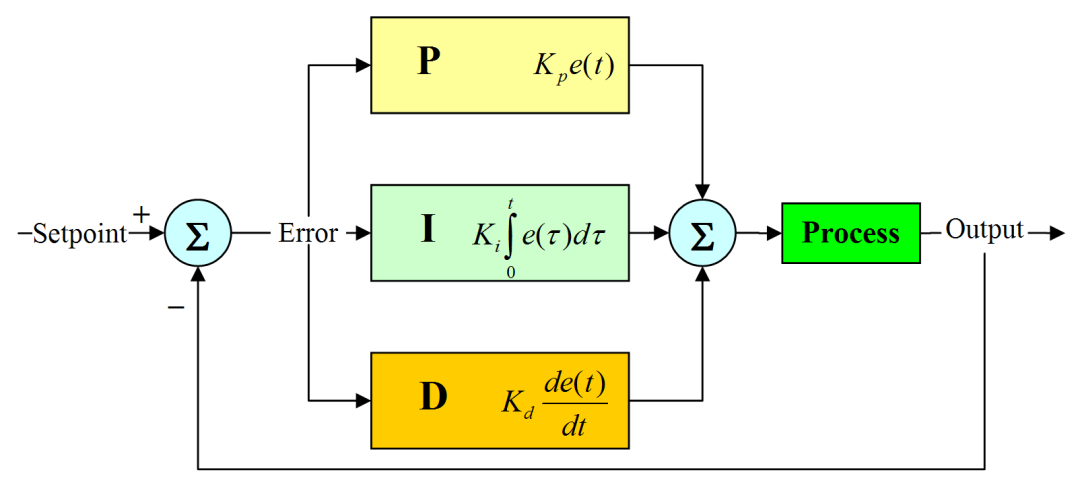
不難看出,PID控制器是一個帶有反饋支路的閉環系統,這個控制器把收集到的數據和一個參考值進行比較,然后根據此誤差值計算新的輸入值。這個新的輸入值的目的是讓系統的輸出數據達到或者保持在參考值。PID控制器可以根據歷史數據和誤差的出現率來調整輸入值,使系統更加準確而穩定。
從編程角度而言,我們需要知道參考值、初始輸出值、比例單元增益、積分單元增益和微分單元增益。但這還不夠,畢竟上圖顯示的是一個模擬系統而非離散化的數字系統。接下來我們看看如何對其進行離散化處理。
比例控制單元
比例控制單元是PID控制器中最簡單的部分,通過一個乘法操作即可完成。其物理意義在于“穩”,即穩定性,放大控制作用,表征的是粗調跟進以快速地響應被控對象和輸入的線性關系。
積分控制單元
如果僅用比例控制單元,那么系統就會出現穩態誤差,因此,我們引入了積分控制單元。積分控制單元的傳遞函數可表示為(在z域)
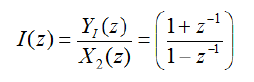
由此可得輸出和輸入的時域表達式為

不難看出,積分的離散化實質上就是累加。從物理角度而言,積分控制單元對于“準”,其目的是消除穩態誤差。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16361瀏覽量
178050 -
PID
+關注
關注
35文章
1472瀏覽量
85521 -
HLS
+關注
關注
1文章
129瀏覽量
24113
原文標題:用HLS實現PID控制器
文章出處:【微信號:Lauren_FPGA,微信公眾號:FPGA技術驛站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于FPGA的模糊PID控制器的設計實現
本文主要詳解基于FPGA的模糊PID控制器的設計實現,首先介紹了FPGA工作原理、基本特點以及FPGA的優勢,其次闡述了使用Altera的FPGA設計實現的數字模糊
基于MBP算法的PID控制器設計
針對一般BP 算法存在的不足,提出一種改進的BP 算法,并將其應用于PID 控制器的參數設計中,并且克服了常規的PID 控制器參數整定的費時性,用
發表于 08-07 09:42
?18次下載


PID控制的理論和PID控制器設計的及PID控制器參數整定的以及分析
PID控制作為一種經典的控制方法而廣泛應用于工業控制中,是實際工業生產過程正常運行的基本保障。隨著計算機技術的飛躍發展和人工智能技術滲透到自動控制
發表于 12-04 08:00
?26次下載





 工商網監
工商網監
評論