 MATLAB在自動駕駛領域的應用開發和最佳實踐
MATLAB在自動駕駛領域的應用開發和最佳實踐
高級駕駛輔助系統(ADAS)和全自動駕駛(AD)正在推動汽車行業的創新,改變交通運輸的方方面面,從日常通勤到長途卡車運輸。這個新興的大趨勢重新定義了傳感器和計算平臺的需求,導致了深度學習、傳感器融合、激光雷達和 V2X 等新技術的發展。此外,隨著復雜度和場景數量急劇增加,ADAS/AD 應用開發在測試驗證方面存在著諸多挑,
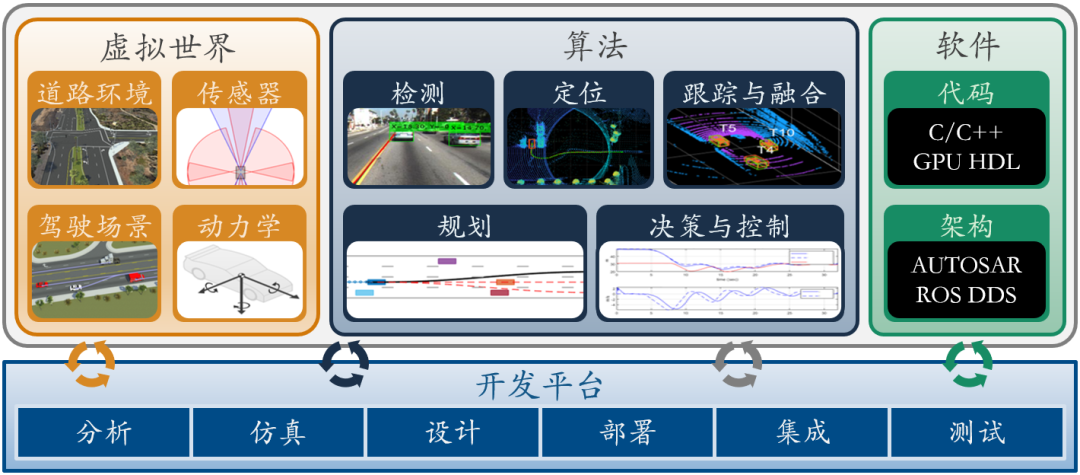
MATLAB、Simulink 和 RoadRunner 開發平臺為計算機視覺、雷達、激光雷達處理、傳感器融合、路徑規劃和控制、虛擬場景創建和軟件實現等提供了許多參考示例、預構建算法、工作流以及完備工具鏈,可以加速自動駕駛系統功能的開發。
本次研討會將由 MathWorks 工程師介紹 R2022a 和 R2022b 中自動駕駛的新特性和示例。同時,一汽解放的客戶嘉賓將分享使用 MATLAB 和 RoadRunner 實現激光雷達SLAM和高精地圖制作的應用實踐。會議時間:11月29日 13:30—16:30
會議亮點
1) 使用 MATLAB 開發視覺和激光雷達 SLAM 系統
本次演講將通過實例來介紹如何使用 MATLAB 來進行基于特征點的視覺SLAM系統的開發,以及基于點云配準的激光雷達 SLAM 算法的開發。同時將展示它們在自動泊車系統當中的應用。
2) Lidar SLAM 與限定區域高精地圖制作高精地圖是低速限定場景自動駕駛解決方案中不可少的一環,如何便捷的制作限定區域的高精地圖就顯得尤為重要。本次演講將分享如何使用MATLAB 自動駕駛相關的工具箱處理激光雷達點云信息,對點云進行配準,回環檢測以及后端優化生成點云地圖,并利用 RoadRunner 和生成的點云地圖創建高精地圖。另外,針對點云全自動生成高精地圖(RoadRunner HD Map)的工作流進行了嘗試探索。
3) MATLAB 智能駕駛參考示例更新——3D 仿真與智能網聯在 MATLAB R2022a 和 R2022b 中,更新了很多仿真智能駕駛功能的參考示例,我們將就以下兩方面的示例進行分享:
如何將 RoadRunner Scenario 的 3D 場景接入到 Simulink,使用Simulink傳感器模型,測試 ADAS 法規場景與高速自動駕駛
如何使用 Simulink 仿真 V2X,以及基于 V2V 通信的卡車編隊駕駛
4) 基于模型設計加速自動駕駛的 SOA 軟件實現自動駕駛算法的復雜性要求采用更高性能的處理器和更高抽象度的語言來承載和實現,并引入面向服務的架構來進行解耦和分層。本演講將通過以下內容的介紹來展示面向服務的軟件架構在自動駕駛方向的具體實現。
自動駕駛算法的組成和特點
基于模型設計支持 SOA 的新特性
SOA 互操作的概念及案例演示
審核編輯 :李倩
-
傳感器
+關注
關注
2552文章
51325瀏覽量
755375 -
激光雷達
+關注
關注
968文章
4003瀏覽量
190161 -
自動駕駛
+關注
關注
784文章
13904瀏覽量
166740
原文標題:線上研討會 | MATLAB 在自動駕駛領域的應用開發和最佳實踐
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS技術在自動駕駛汽車中的應用
使用PVA引擎優化自動駕駛汽車CV開發流水線

Waymo估值超450億美元,自動駕駛領域再掀波瀾
人工智能的應用領域有自動駕駛嗎

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
中級自動駕駛架構師應該學習哪些知識
初級自動駕駛架構師應該學習哪些知識
自動駕駛仿真測試實踐:高精地圖仿真

小馬智行再獲自動駕駛卡車編隊測試許可
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
大眾汽車和Mobileye加強自動駕駛合作
自動駕駛領域的數據集匯總






 工商網監
工商網監
評論