") 智能座艙域控制器技術(shù)發(fā)展趨勢(shì)分析
智能座艙域控制器技術(shù)發(fā)展趨勢(shì)分析
引言
提到座艙域控制器用的主控SoC芯片,大家第一個(gè)會(huì)想到應(yīng)該就是高通的SA8155P 。目前,在主機(jī)廠新上市的中高端車(chē)型中,其座艙的主控SoC芯片多是采用高通的SA8155P, SA8155P為什么會(huì)得到眾多主機(jī)廠的青睞呢?不妨先看一看高通座艙SoC芯片的迭代歷程。
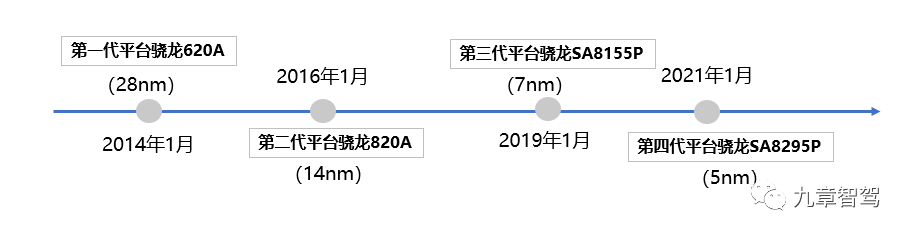
高通座艙芯片的迭代歷程

高通四代座艙SoC芯片的算力
通過(guò)對(duì)比高通的四代座艙芯片,能夠從側(cè)面反映出:智能座艙的算力需求在不斷增長(zhǎng),不管是CPU算力(DMIPS)、GPU算力(FLOPS)或者是NPU算力(TOPS)。
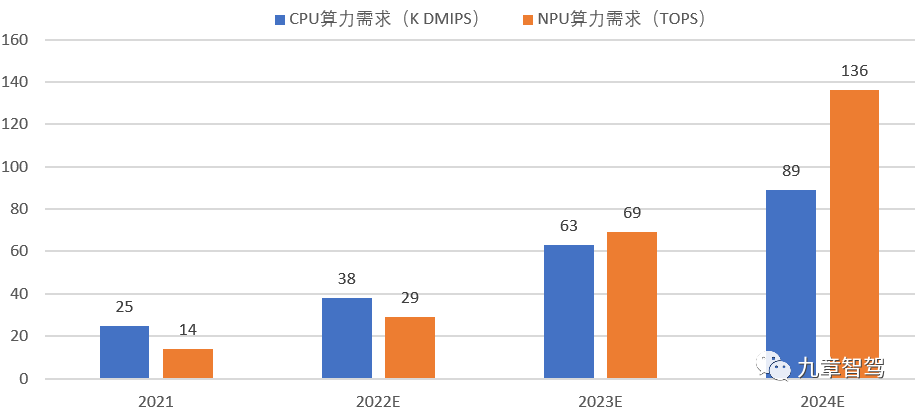
CPU算力和NPU算力需求預(yù)測(cè)(數(shù)據(jù)來(lái)源 - IHS Markit)
那么,智能座艙算力需求不斷增長(zhǎng)的驅(qū)動(dòng)力又是什么呢?
1)EE架構(gòu)的不斷升級(jí)推動(dòng)座艙功能集成化
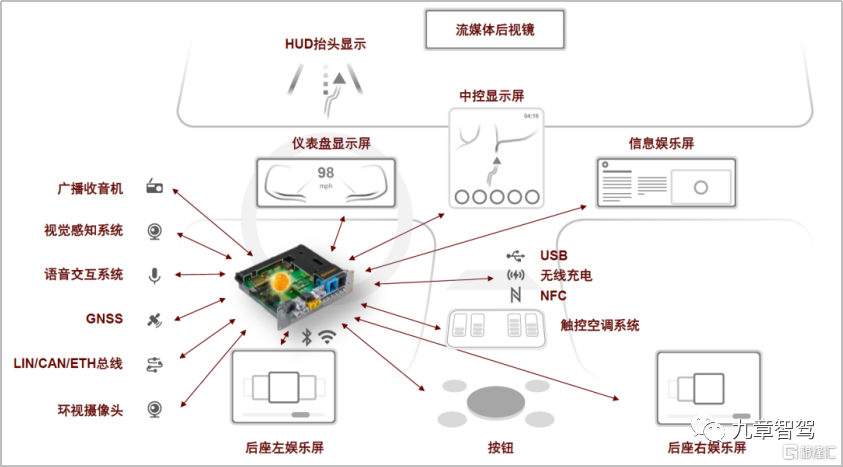
智能座艙系統(tǒng)架構(gòu)圖(圖片來(lái)源:大陸集團(tuán),中金公司研究部)
座艙集成的功能越來(lái)越多,需要處理的數(shù)據(jù)越來(lái)越多、也越來(lái)越復(fù)雜,因此座艙對(duì)算力的需求將持續(xù)增長(zhǎng)。當(dāng)前座艙域控制器功能集成的外在表現(xiàn)主要有:一芯多屏、艙內(nèi)感知技術(shù)融合 、艙泊一體等。
2)艙內(nèi)應(yīng)用場(chǎng)景的拓展
傳統(tǒng)意義上的座艙一般只服務(wù)于駕駛員,現(xiàn)在座艙的概念從“駕艙”擴(kuò)展到整個(gè)“座艙”,服務(wù)的對(duì)象就不再只是重點(diǎn)針對(duì)駕駛員,還包括了副駕和后排乘客。
芯馳科技資深產(chǎn)品市場(chǎng)總監(jiān)金輝說(shuō):“傳統(tǒng)的車(chē)機(jī)系統(tǒng)基本上只和駕駛員發(fā)生交互,而現(xiàn)在的智能座艙系統(tǒng)還需要同時(shí)和多個(gè)乘客發(fā)生交互,即多人交互。”
隨著自動(dòng)駕駛能力由人機(jī)共駕過(guò)渡到無(wú)人駕駛階段,座艙的應(yīng)用場(chǎng)景不斷拓展,除了用于導(dǎo)航、安全預(yù)警等傳統(tǒng)駕駛/安全相關(guān)的需求外,各種各樣的人機(jī)交互以及娛樂(lè)體驗(yàn)變得越來(lái)越突出,座艙的應(yīng)用場(chǎng)景開(kāi)始逐漸延伸到辦公、生活以及娛樂(lè)等。
應(yīng)用場(chǎng)景不斷地拓展,自然會(huì)衍生出一些新的功能需求,從而間接推動(dòng)座艙算力需求的增長(zhǎng)。
3)數(shù)據(jù)安全的重視
座艙內(nèi)的應(yīng)用生態(tài)越來(lái)越豐富,它對(duì)安全性的要求也變得越來(lái)越高。“每個(gè)人都希望保護(hù)好自己的隱私,國(guó)家也推出了數(shù)據(jù)保護(hù)和個(gè)人隱私保護(hù)相關(guān)的法律和法規(guī)。數(shù)據(jù)安全的處理,在一定程度上也會(huì)推高座艙對(duì)算力的需求。”均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)介紹說(shuō)。
本文先從智能座艙域控制器的硬件架構(gòu)特點(diǎn)入手,再?gòu)墓δ芗杀憩F(xiàn)、產(chǎn)品形態(tài)、數(shù)據(jù)安全三個(gè)維度講智能座艙域控制器的技術(shù)發(fā)展趨勢(shì)。
1. 座艙域控制器硬件架構(gòu)特點(diǎn)
? 1.1 座艙域控制器硬件架構(gòu)方案:SoC + MCU
當(dāng)前,座艙域控制器和智駕域控制器的硬件架構(gòu)非常相似,都是SoC+MCU的方案。
座艙域控控制器的主控SoC芯片用于跑復(fù)雜的操作系統(tǒng),做大數(shù)據(jù)的處理,比如圖像、視頻、音頻等非結(jié)構(gòu)化數(shù)據(jù)的處理。
但是,現(xiàn)在的智能座艙主控SoC芯片架構(gòu)多是從手機(jī)端遷移過(guò)來(lái)的,本身不帶車(chē)載網(wǎng)絡(luò)訪問(wèn)的接口,比如CAN、MOST、LIN等。因此,需要搭配MCU去訪問(wèn)車(chē)身網(wǎng)絡(luò)。因此,復(fù)雜的座艙域控制器一般都是采用兩類(lèi)芯片:SoC+MCU。
一般情況下:
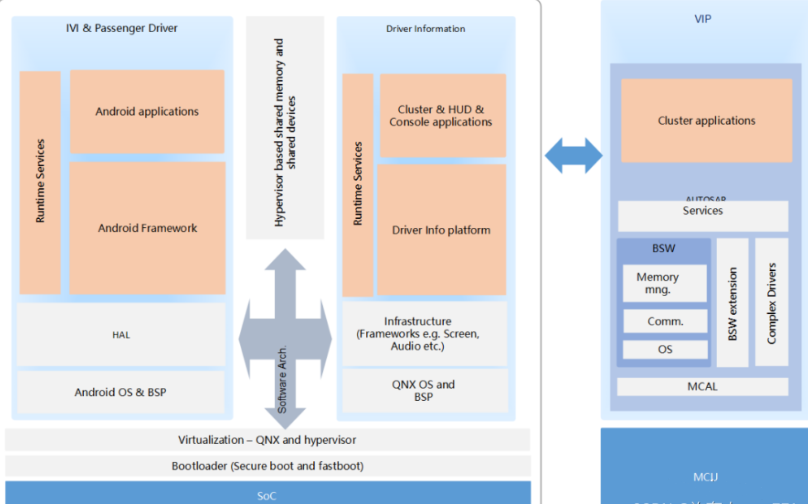
1)SoC運(yùn)行Hypervisor,在Hypervisor之上運(yùn)行兩類(lèi)操作系統(tǒng),其中對(duì)實(shí)時(shí)性和安全性要求比較高的安全域模塊跑在QNX或者Linux系統(tǒng)上;對(duì)實(shí)時(shí)性要求不太高、但對(duì)生態(tài)要求比較高的娛樂(lè)域模塊跑在Android系統(tǒng)上;
2)MCU運(yùn)行AUTOSAR系統(tǒng),用于CAN/LIN總線的喚醒、通訊以及電源管理等。
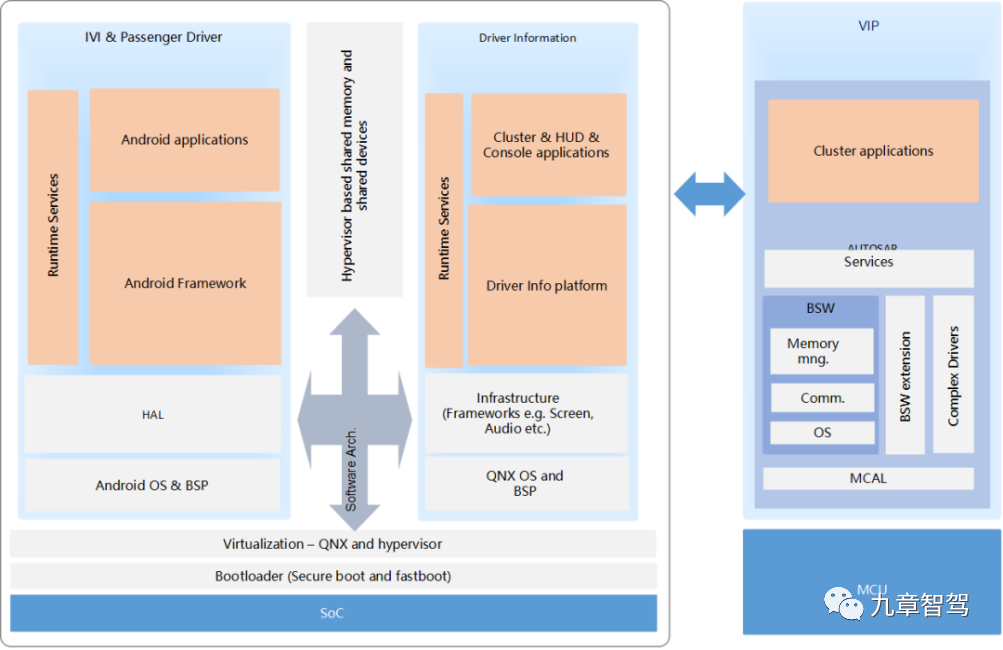
座艙域控系統(tǒng)軟件架構(gòu)(圖片來(lái)源:公眾號(hào)-阿寶1990)
為什么MCU是座艙域控硬件架構(gòu)中不可或缺的一部分呢?諾博汽車(chē)副總經(jīng)理陳禮順解釋道:“MCU的實(shí)時(shí)性和可靠性要求非常高,啟動(dòng)喚醒都是毫秒級(jí)別,需要支持CAN、LIN各類(lèi)車(chē)載通訊總線。座艙域控制器與車(chē)身、動(dòng)力等控制器的信息交互需要通過(guò)MCU來(lái)完成。另外,MCU還需要對(duì)SoC進(jìn)行電源管理和狀態(tài)監(jiān)控。
“也有廠商打算通過(guò)在SoC里面集成一個(gè)MCU模塊,來(lái)替代外掛的MCU,但是目前內(nèi)置MCU的方案的可靠性有待驗(yàn)證,并且集成后的MCU和SoC電源需要考慮獨(dú)立供電以降低靜態(tài)功耗,實(shí)現(xiàn)起來(lái)也相對(duì)復(fù)雜些。
“相比于MCU,SoC的功耗很大(靜態(tài)電流很大),所以在整機(jī)睡眠狀態(tài)下,SoC一般處于斷電狀態(tài),MCU處于供電狀態(tài)。當(dāng)MCU監(jiān)控到有喚醒源時(shí),會(huì)把SoC喚醒,然后SoC開(kāi)始啟動(dòng)工作;如果SoC需要進(jìn)入睡眠模式,MCU會(huì)把SoC電源給斷掉。
“此外,整個(gè)產(chǎn)品級(jí)控制器的電源管理都是通過(guò)MCU去實(shí)現(xiàn)的,MCU是不可缺少的。”
1.2 座艙主控SoC芯片與智駕主控SoC芯片的區(qū)別
跟智駕主控soc芯片一樣,座艙主控SoC芯片也是采用異構(gòu)多核架構(gòu),并且,兩者的內(nèi)部架構(gòu)也大體相似——都包括了CPU、GPU、NPU等多種異構(gòu)資源 ,但座艙和智駕畢竟是兩種不同的應(yīng)用場(chǎng)景,這就決定了座艙SoC芯片和智駕SoC芯片在設(shè)計(jì)的時(shí)候會(huì)各有側(cè)重點(diǎn)。
1)異構(gòu)架構(gòu)的側(cè)重點(diǎn)不同
座艙域控器主控SoC芯片的側(cè)重點(diǎn)是CPU和GPU,智駕域控器主控SoC芯片的側(cè)重點(diǎn)是CPU和NPU。
CPU用于通用邏輯運(yùn)算,比如說(shuō)系統(tǒng)調(diào)度、外部資源訪問(wèn)等,不管是座艙系統(tǒng),還是智駕系統(tǒng),CPU資源都是不可或缺的。
GPU浮點(diǎn)運(yùn)算能力強(qiáng),但是在智駕SoC芯片上,基本上不會(huì)集成非常強(qiáng)的GPU,因?yàn)槠鋬?nèi)部NPU的張量單元本身就很強(qiáng),不需要GPU去做張量運(yùn)算和加速運(yùn)算;座艙SoC芯片需要進(jìn)行圖像的3D渲染、圖像拼接以及運(yùn)行大型的3D 游戲等應(yīng)用,因此座艙SoC芯片對(duì)GPU的能力要求會(huì)比智駕SoC芯片高。
NPU作為神經(jīng)網(wǎng)絡(luò)算法的加速器,負(fù)責(zé)處理AI方面的計(jì)算需求。智能駕駛對(duì)NPU的算力需求比較大,這點(diǎn)毋容置疑;一些座艙SoC芯片雖然也帶有NPU模塊,可以做DMS或者LDW等一些基礎(chǔ)的駕駛輔助功能,但整體而言,座艙主控SoC芯片中的NPU性能要弱于智駕主控SoC芯片中的NPU。
總之,座艙主控SoC芯片是通用核強(qiáng)于專(zhuān)用核,智駕主控SoC芯片則是專(zhuān)用核強(qiáng)于通用核。
2)接口定義的區(qū)別
座艙域控器主控SoC芯片和智駕域控制器SoC芯片的接口定義也有很大的區(qū)別。均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)認(rèn)為,座艙面向的應(yīng)用場(chǎng)景更側(cè)重于艙內(nèi)的人機(jī)交互能力。人機(jī)交互則需要提供大量的數(shù)據(jù)輸出,比如,視頻、聲音,還有其它投影圖像等數(shù)據(jù)輸出;同時(shí),還需要獲取車(chē)?yán)锏臄?shù)據(jù)輸入,主要是車(chē)內(nèi)人員的數(shù)據(jù)輸入—— 有視頻(DMS/OMS)、也有聲音(麥克風(fēng))等。因此,座艙SoC芯片會(huì)面臨一些多樣化的傳感器數(shù)據(jù)的輸入和輸出要求。
諾博汽車(chē)副總經(jīng)理陳禮順也基本認(rèn)同這一觀點(diǎn),他說(shuō):“座艙外設(shè)的側(cè)重點(diǎn)在于音視頻等大數(shù)據(jù)的輸入輸出等。比如,支持多少DP或DSI 接口—— 決定了能接多少路顯示屏;支持多少路TDM - 決定了是否可以實(shí)現(xiàn)更復(fù)雜的多場(chǎng)景音頻通路;還要支持GNSS、WIFI、Bluetooth等模塊接口。總之,座艙SoC芯片對(duì)外圍接口的要求非常高。
“在自動(dòng)駕駛系統(tǒng)解決方案中,毫米波雷達(dá)信號(hào)一般通過(guò)CAN總線傳輸,激光雷達(dá)信號(hào)一般通過(guò)以太網(wǎng)傳輸,這些都是標(biāo)準(zhǔn)通訊接口,因此,智駕主控SoC芯片的外設(shè)接口就相對(duì)簡(jiǎn)單,外設(shè)方面需要重點(diǎn)考慮攝像頭的接入。”
3)功能安全設(shè)計(jì)的差別
“功能安全不是針對(duì)芯片,而是針對(duì)產(chǎn)品本身。功能安全設(shè)計(jì)是一個(gè)系統(tǒng)工程,既可以在芯片層面設(shè)計(jì)一些冗余或者增加一些狀態(tài)檢測(cè),也可以針對(duì)控制器產(chǎn)品本身進(jìn)行系統(tǒng)級(jí)的監(jiān)控以及功能分解。
“芯片廠商在做SoC芯片設(shè)計(jì)開(kāi)發(fā)的時(shí)候,如果考慮功能安全,必然要考慮它具體的應(yīng)用場(chǎng)景,是應(yīng)用于座艙,還是應(yīng)用于駕駛,甚至是具體的某些工況,然后再針對(duì)相應(yīng)的場(chǎng)景、工況做針對(duì)性的基于芯片層面的功能安全設(shè)計(jì)。”諾博汽車(chē)副總經(jīng)理陳禮順告訴九章智駕。
座艙SoC芯片和智駕SoC芯片在做功能安全認(rèn)證方面沒(méi)有太大的差異,但是在功能安全設(shè)計(jì)上有一定的差別。
據(jù)相關(guān)業(yè)內(nèi)人士透露,除芯片本身的功能安全設(shè)計(jì)之外,還需要有其它的設(shè)計(jì)來(lái)聯(lián)合保證智能駕駛的功能安全要求達(dá)標(biāo)。芯片只是一部分,系統(tǒng)方案是另外一部分,如果要做系統(tǒng)方案?jìng)浞荩酒O(shè)計(jì)本身就需有一些接口能夠做冗余通訊方式。
相對(duì)而言,座艙系統(tǒng)對(duì)功能安全設(shè)計(jì)的要求就要低很多,即便是對(duì)安全性和實(shí)時(shí)性要求比較高的儀表或者HUD模塊,主控SoC芯片功能安全等級(jí)達(dá)到ASIL B即可滿足要求。
2. 座艙功能集成化的表現(xiàn)
整車(chē)EE架構(gòu)由分布式架構(gòu)向域集中式架構(gòu)升級(jí),驅(qū)動(dòng)座艙內(nèi)一個(gè)個(gè)獨(dú)立的ECU集成到一個(gè)座艙域控制器的DCU上。座艙需要整合的功能越來(lái)越多,那么座艙進(jìn)行功能整合的原則是什么?哪些功能適合被整合進(jìn)去?
2.1 功能整合的原則
1)在座艙主控SoC芯片的能力邊界之內(nèi)
集成什么樣的功能取決于座艙主控SoC,主機(jī)廠或Tier1會(huì)評(píng)估座艙主控SoC能夠支持接入多少路、多大分辨率的攝像頭和顯示屏;同時(shí),也要看被整合功能的安全等級(jí)是否能夠被座艙芯片覆蓋到(不超過(guò)ASIL B),如果主控SoC的處理能力或性能能夠覆蓋到此功能,那么便可以初步判斷,此功能適合作為座艙功能的一個(gè)延伸,被集成進(jìn)去。
2)無(wú)需額外新增硬件
如果增加一項(xiàng)或幾項(xiàng)功能,可以不用增加硬件,只需要把算法和軟件移植到座艙域控制器里面,同時(shí),在成本上還具有一定的競(jìng)爭(zhēng)力,此功能便適合被集成進(jìn)去。
2.2 座艙功能集成化的三種表現(xiàn)
隨著智能座艙主控SoC芯片性能的不斷提升,以及5G車(chē)聯(lián)網(wǎng)、OTA等功能的加速滲透,無(wú)論是主機(jī)廠還是Tier1,都開(kāi)始注重智能座艙域控制器在功能上的融合。座艙域控制器的功能集成主要表現(xiàn)在如下幾個(gè)方面:
2.2.1 一芯多屏
在傳統(tǒng)的座艙解決方案中,中控、儀表等系統(tǒng)相互獨(dú)立,一般由單一芯片驅(qū)動(dòng)單個(gè)功能/系統(tǒng)。隨著座艙智能化發(fā)展,座艙域控制器進(jìn)一步集成儀表、HUD、流媒體后視鏡等其它系統(tǒng) —— 從單個(gè)SoC驅(qū)動(dòng)單個(gè)系統(tǒng)單一屏幕到單一SoC支持多系統(tǒng)多屏顯示。
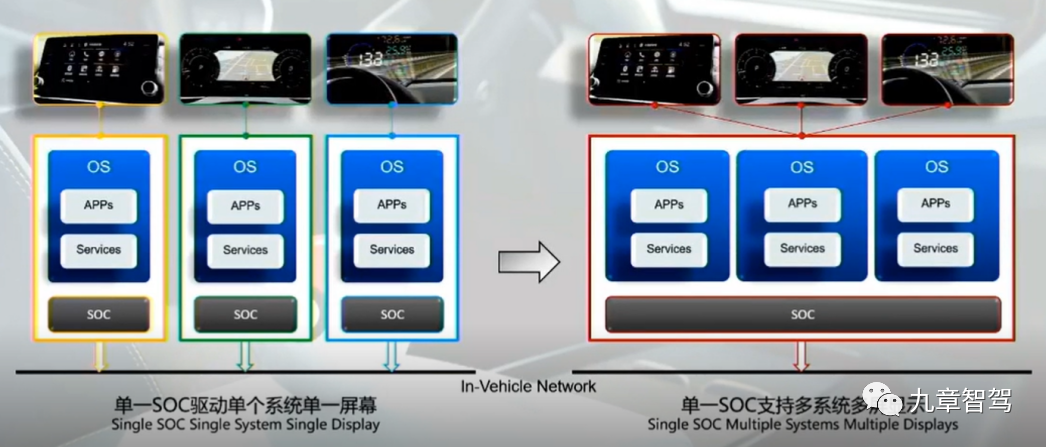
一芯多屏(圖片來(lái)源:大眾對(duì)外公開(kāi)宣講材料)
要在一個(gè)SoC芯片上支持多個(gè)屏的顯示,從安全性角度考慮,虛擬儀表、HUD需要采用QNX或者Linux系統(tǒng);從軟件生態(tài)角度考慮,中控導(dǎo)航、副駕娛樂(lè)和后排娛樂(lè)則需要采用Android系統(tǒng)。
目前主流的方案是采用虛擬機(jī)-Hypervisor來(lái)實(shí)現(xiàn)在一個(gè)硬件上運(yùn)行多個(gè)操作系統(tǒng),那么現(xiàn)階段,Hypervisor技術(shù)在座艙上的應(yīng)用還存在哪些不足或需要提升的地方?是否有其它技術(shù)可以作為Hypervisor技術(shù)的替代方案呢?
Hypervisor技術(shù)存在的不足或需要提升的地方:
1)會(huì)造成一定的硬件性能損失
芯馳科技資深產(chǎn)品市場(chǎng)總監(jiān)金輝介紹說(shuō):“使用軟件虛擬化需要付出代價(jià),不管是CPU、GPU,還是NPU,它們的算力在軟件虛擬化的過(guò)程中會(huì)流失掉一部分,并沒(méi)有被完全用起來(lái),也就是說(shuō)性能打了折扣。同時(shí),外設(shè)訪問(wèn)的性能也會(huì)受到軟件虛擬化的影響—— 多個(gè)系統(tǒng)要通過(guò)軟件虛擬化去訪問(wèn)同一個(gè)接口,這個(gè)接口需要在虛擬機(jī)軟件里去做一些軟件層面的處理,訪問(wèn)外設(shè)的效率和性能會(huì)降低。”
“ 使用Hypervisor一定會(huì)導(dǎo)致系統(tǒng)開(kāi)銷(xiāo)增大,像GPU、CPU以及NPU等系統(tǒng)資源進(jìn)行虛擬化處理的時(shí)候,硬件資源在不同的應(yīng)用之間進(jìn)行切換,不可避免地會(huì)造成系統(tǒng)總負(fù)載的升高。”均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)也基本認(rèn)同這一觀點(diǎn)。
2)系統(tǒng)沒(méi)有實(shí)現(xiàn)有效的隔離
“Hypervisor技術(shù)是通過(guò)軟件來(lái)實(shí)現(xiàn)系統(tǒng)的劃分,并沒(méi)有實(shí)現(xiàn)硬件層面的有效隔離 —— 各系統(tǒng)都是放在同一個(gè)軟件的上層去運(yùn)行,相比于硬隔離方案,功能安全和信息安全得不到有效的硬件保障。”芯馳科技資深產(chǎn)品市場(chǎng)總監(jiān)金輝表示。
那么,是否有Hypervisor的替代方案呢?
均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)告訴九章智駕:“QNX的行業(yè)地位,短期內(nèi)很難被撼動(dòng)。所有的選擇都是在成本和效率之間去尋找平衡。目前有一些企業(yè)采用硬隔離的方案,硬隔離方案是一種選擇;不用硬隔離方案,在芯片上進(jìn)行軟件隔離也是一種選擇。”
采用Hypervisor技術(shù)的優(yōu)勢(shì)在于所有的IP核( CPU、GPU、DSP等)以及周?chē)耐庠O(shè)都可以共享,而硬隔離的問(wèn)題在于資源不能很好地去共享。比如,安全域中用于儀表模塊的資源閑置了,也沒(méi)辦法分配給娛樂(lè)域去使用。
但是,硬隔離也有自身優(yōu)勢(shì),芯馳科技資深產(chǎn)品市場(chǎng)總監(jiān)金輝表示:“相比于Hypervisor技術(shù),采用硬隔離方案便無(wú)需支付虛擬化軟件上的License費(fèi)用,并且算力也不打折扣,功能安全和信息安全也能夠得到保障。”
2.2.2 艙內(nèi)感知技術(shù)融合
目前DMS的主流實(shí)現(xiàn)方案是基于人臉識(shí)別的視覺(jué)技術(shù),對(duì)芯片的要求很高 —— 首先是車(chē)規(guī)級(jí)的要求,需要經(jīng)過(guò)環(huán)境試驗(yàn)和壽命試驗(yàn)等可靠性認(rèn)證;其次是對(duì)AI算力的需求也較高,比如,為了準(zhǔn)確識(shí)別人臉3D 的球狀形象,不僅需要較高分辨率的攝像頭,在圖像數(shù)據(jù)采集后還需要將模型進(jìn)行優(yōu)化。
隨著技術(shù)的發(fā)展,DMS延伸發(fā)展到了OMS,即將檢測(cè)范圍從駕駛員擴(kuò)展到車(chē)內(nèi)乘客,比如,檢測(cè)乘客是否系安全帶,下車(chē)的時(shí)候是否把兒童遺忘在車(chē)內(nèi)等應(yīng)用場(chǎng)景。當(dāng)前不少主機(jī)廠已經(jīng)將DMS和OMS組合起來(lái)進(jìn)行應(yīng)用。
DMS及OMS功能主要是通過(guò)對(duì)艙內(nèi)攝像頭數(shù)據(jù)的實(shí)時(shí)分析來(lái)實(shí)現(xiàn)的。現(xiàn)在座艙主控SoC芯片的算力和性能越來(lái)越強(qiáng),不僅能夠支持多通道的視頻輸入能力,還集成有單獨(dú)的DSP單元。
將DMS/OMS功能融合到座艙,不僅是因?yàn)樽揝oC芯片的性能能夠覆蓋到DMS/OMS ,也是因?yàn)榘阉鼈內(nèi)诤系阶摚鼈儽憧梢院妥搩?nèi)的其它關(guān)聯(lián)模塊更好地進(jìn)行信息交互。
比如,偉世通的 HMEye 是基于視線測(cè)量的 DMS,除了可以監(jiān)測(cè)駕駛員的雙手和視線是否在駕駛狀態(tài),它還可以讓駕駛員通過(guò)眼球的轉(zhuǎn)動(dòng)實(shí)現(xiàn)開(kāi)關(guān)廣播、調(diào)整溫度、開(kāi)啟導(dǎo)航等功能,這樣,在駕駛過(guò)程中,駕駛員便可以更安全地去進(jìn)行人機(jī)互動(dòng)。
2.2.3 艙泊一體
泊車(chē)融入到座艙也有功能集成化的因素:早期的360環(huán)視都有單獨(dú)的控制器;后來(lái)360環(huán)視和自動(dòng)泊車(chē)輔助APA進(jìn)行融合,再升級(jí)到融合泊車(chē)功能,控制器的性能再次升級(jí);再往后發(fā)展,座艙主控SoC芯片具了更強(qiáng)的CPU算力和AI算力,具備了整合泊車(chē)功能的條件,于是,也便有了把泊車(chē)功能融合到座艙的需求出現(xiàn)。
座艙整合基本的泊車(chē)功能:一是可以降本,至少可以把原來(lái)泊車(chē)的控制器省掉,能夠節(jié)省一定的物料成本;二是整合到座艙,能夠更好地做泊車(chē)場(chǎng)景下的人機(jī)交互設(shè)計(jì),把泊車(chē)功能融入到座艙,座艙域控制器會(huì)得到更多的泊車(chē)信號(hào);最后,座艙上的算力也能得到最大程度的利用。
均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)解釋道:“泊車(chē)功能是在停車(chē)的場(chǎng)景下才會(huì)用到,剛好跟座艙上的一些應(yīng)用形成時(shí)間上的錯(cuò)位 ,比如導(dǎo)航信息顯示、行車(chē)信息顯示都是在行車(chē)的時(shí)候使用,泊車(chē)的時(shí)候這些應(yīng)用基本都處于停用狀態(tài),因此,泊車(chē)時(shí)便可以將座艙上剩余的大部分算力全部用于做泊車(chē)的相關(guān)應(yīng)用。”
3. 座艙域控制器產(chǎn)品形態(tài)的變化
在不同的自動(dòng)駕駛階段,座艙域控設(shè)計(jì)理念上的不同,甚至?xí)?dǎo)致產(chǎn)品的形態(tài)產(chǎn)生較大的差異。
從技術(shù)發(fā)展趨勢(shì)上來(lái)看,當(dāng)前屬于人機(jī)共駕階段,即所謂的駕駛輔助階段。在此階段,智駕域控和智艙域控還是兩個(gè)獨(dú)立的控制器。等過(guò)渡到真正的無(wú)人駕駛階段,業(yè)內(nèi)人士普遍認(rèn)為,隨著整車(chē)電子電氣架構(gòu)的進(jìn)一步升級(jí),達(dá)到所謂的中央計(jì)算平臺(tái)+區(qū)域控制器的架構(gòu)階段,座艙和智駕的功能會(huì)高度融合,即艙駕一體。
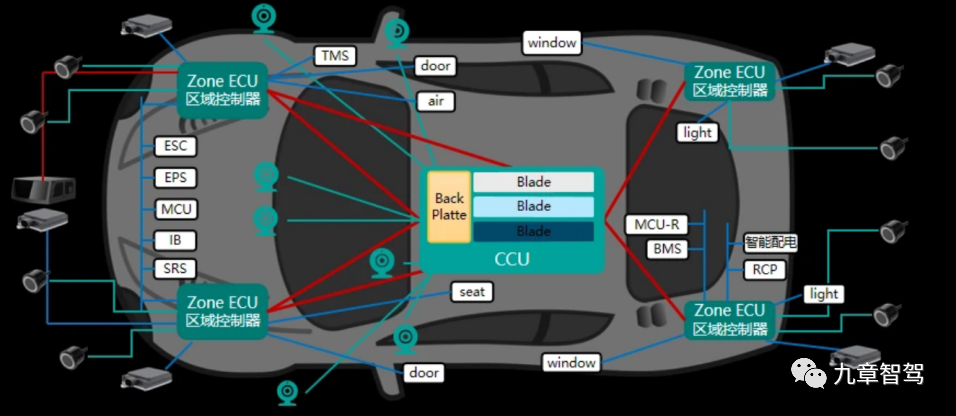
中央計(jì)算+區(qū)域控制架構(gòu)(圖片來(lái)源:均聯(lián)智行對(duì)外宣傳材料)
根據(jù)不同階段的EE架構(gòu)和主控SoC芯片的融合能力,艙駕一體高性能計(jì)算平臺(tái)又會(huì)出現(xiàn)不同的形態(tài):
采用多顆SoC芯片,座艙和智駕功能分別部署在不同板子上,板間通過(guò)以太網(wǎng)或PCIE連接
采用多顆SoC芯片,座艙和智駕功能部署在同一個(gè)板子上
座艙和智駕功能部署到單SoC芯片上
現(xiàn)在有人提到艙架一體HPC,但它也不是單SoC芯片方案,基本上是由兩塊板子組成,一塊板子跑智能座艙系統(tǒng),另外一塊板子跑智能駕駛系統(tǒng),但是,這樣的結(jié)構(gòu)形式對(duì)散熱設(shè)計(jì)和供電設(shè)計(jì)提出了很高的要求。
某主機(jī)廠EE架構(gòu)專(zhuān)家告訴九章智駕:“在域控制器階段,智艙和智駕還是分別采用單獨(dú)的盒子控制,這在目前來(lái)看還是比較好的方案。如果現(xiàn)在要把兩個(gè)獨(dú)立盒子的方案改為一個(gè)盒子內(nèi)兩塊板子的方案,成本應(yīng)該是可以降低,但在工程上會(huì)比較麻煩:比如一盒子里有多塊板子,不同的板子用不同的供應(yīng)商,中途發(fā)現(xiàn)不好用,換起來(lái)會(huì)很麻煩;如果是改為一個(gè)盒子一塊板子的方案,意味著要把太多的功能綁在一塊板子上,必然要受多方的牽扯,前期的協(xié)調(diào)溝通以及后期的更換維護(hù)都會(huì)比較復(fù)雜。”
某主機(jī)廠資深工程師也同意現(xiàn)階段座艙系統(tǒng)和智駕系統(tǒng)應(yīng)該相互獨(dú)立的觀點(diǎn),他說(shuō):“單純從整車(chē)EE架構(gòu)的演進(jìn)來(lái)看,艙駕融合肯定是大勢(shì)所趨,但從短期來(lái)看,把智駕和智艙結(jié)合在一起,純粹是一種形式上的結(jié)合,不是從產(chǎn)品需求的角度分解出來(lái)的結(jié)果。
“兩者面向的應(yīng)用場(chǎng)景、功能定義、性能邊界都不一樣,至少?gòu)哪壳皝?lái)看,我覺(jué)得兩者沒(méi)必要去融合,如果硬要把他們捏在一起,不管是芯片的選型,還是外圍電路的設(shè)計(jì),面臨的要求都不一樣。那么,在成本和性能的考慮上,我們到底應(yīng)該傾向于誰(shuí)?總之,兩者融合的方式會(huì)給開(kāi)發(fā)者帶來(lái)一系列設(shè)計(jì)方面的難題。”
雖然單SoC芯片的艙駕一體架構(gòu)方案才能實(shí)現(xiàn)真正的座艙和智駕融合,但是座艙和智駕在功能需求、功能安全要求、信息安全要求以及對(duì)不同類(lèi)型算力需求的側(cè)重點(diǎn)等多個(gè)方面的要求是不一樣的,如果兩者放在一個(gè)芯片內(nèi)去做,系統(tǒng)將會(huì)異常復(fù)雜,短期內(nèi)很難有一款單SoC芯片能夠同時(shí)滿足這樣的需求。
現(xiàn)階段,單SoC芯片的艙駕一體方案仍面臨一些硬件和軟件上的問(wèn)題。具體面臨什么樣的問(wèn)題,這里便不多做介紹,感興趣的讀者可查看筆者之前的文章:“艙駕融合”技術(shù)發(fā)展趨勢(shì)分析,里有比較詳細(xì)的介紹。
4. 智能座艙的數(shù)據(jù)安全防護(hù)
現(xiàn)在座艙內(nèi)的攝像頭越來(lái)越多,艙內(nèi)的功能也日漸豐富。座艙系統(tǒng)將會(huì)在本地使用大量的用戶數(shù)據(jù),同時(shí)也需要和云端保持實(shí)時(shí)的數(shù)據(jù)共享和同步,座艙域控制器是車(chē)企后續(xù)進(jìn)行用戶數(shù)據(jù)收集、OTA的重要端口,因此座艙系統(tǒng)的數(shù)據(jù)安全將變得非常重要。
那么應(yīng)如何保護(hù)用戶的私有敏感數(shù)據(jù)信息不被泄露和非法使用呢?
4.1 確保操作系統(tǒng)本身的信息安全
首先,要確保操作系統(tǒng)本身的信息安全,比如,Andriod、QNX等系統(tǒng)在啟動(dòng)的時(shí)候,需要做安全啟動(dòng)校驗(yàn),防止系統(tǒng)遭到病毒感染。另外,對(duì)操作系統(tǒng)進(jìn)行權(quán)限控制,做一些最小化的授權(quán)事項(xiàng),避免所有的應(yīng)用都可以訪問(wèn)一些很私密的區(qū)域。
其次,控制器之間的通信需要做一些安全通信處理,比如做C2C加密,一個(gè)報(bào)文過(guò)來(lái),需要校驗(yàn)是誰(shuí)發(fā)的。
4.2 數(shù)據(jù)加密和脫敏處理
數(shù)據(jù)采集和數(shù)據(jù)存儲(chǔ)不僅需要得到用戶的授權(quán),同時(shí)還需要進(jìn)行加密和脫敏處理。
數(shù)據(jù)加密 ——座艙SoC芯片里有一個(gè)信息安全的模塊HSM,它內(nèi)置了信息安全的加密引擎。用戶有了這些引擎和配套的處理器之后,可以在上層構(gòu)建一些加密算法,比如國(guó)密的SM2/SM3/SM4/SM9,或者是商用的一些加密算法等。
座艙信息安全的基本框架主要就是私鑰加密+公鑰解密。傳輸?shù)碾[私數(shù)據(jù),第一,需要簽授權(quán);第二,需要加密。也就是說(shuō),用私鑰加密,加密完了之后把數(shù)據(jù)發(fā)給對(duì)方。對(duì)方用公鑰解密后才能看到數(shù)據(jù)。在傳輸過(guò)程中,其他任何人如果沒(méi)有公鑰,即便拿到數(shù)據(jù)也解密不出來(lái)。
數(shù)據(jù)脫敏 ——識(shí)別人的時(shí)候不能識(shí)別人的身份,也不能識(shí)別人的個(gè)性特征,比如,是男還是女。采集數(shù)據(jù)自然就可能會(huì)涉及到對(duì)他人隱私的侵犯,所以數(shù)據(jù)必須要經(jīng)過(guò)脫敏處理。并且,很多數(shù)據(jù)必須在終端上處理,不能送到云端處理,以避免在往云端傳輸?shù)倪^(guò)程中出現(xiàn)數(shù)據(jù)泄露的風(fēng)險(xiǎn)。
總之,數(shù)據(jù)安全的防護(hù)是非常復(fù)雜的工程,需要從各個(gè)方面去考慮。在保護(hù)數(shù)據(jù)的同時(shí),還要防止被黑客侵入。“在全球,有很多黑客去攻擊特斯拉的車(chē)輛,去尋找漏洞,然后再上報(bào)給特斯拉去獲取一些獎(jiǎng)勵(lì)。現(xiàn)在很多車(chē)輛都要求做滲透測(cè)試,也就是說(shuō)去找一家第三方公司去破解這輛車(chē),看它有沒(méi)有漏洞。”均聯(lián)智行中國(guó)區(qū)CTO陳遠(yuǎn)舉例說(shuō)。
5. 座艙主控SoC芯片市場(chǎng)格局
當(dāng)前,座艙域控制器的主控SoC芯片的市場(chǎng)格局已經(jīng)逐漸明朗:中低端市場(chǎng) —— 傳統(tǒng)汽車(chē)芯片廠商是主力,比如 瑞薩、TI、恩智浦等;高端市場(chǎng) —— 消費(fèi)電子芯片廠商是主力,比如高通、三星、英特爾、AMD等。
為什么消費(fèi)電子芯片廠商能夠殺入到座艙芯片市場(chǎng)領(lǐng)域?
有業(yè)內(nèi)專(zhuān)家指出,消費(fèi)電子芯片廠商之所以能夠進(jìn)入座艙領(lǐng)域,是因?yàn)閺南M(fèi)電子芯片轉(zhuǎn)向座艙芯片的壁壘并不高 —— 兩者在技術(shù)層面的要求高度相似,車(chē)規(guī)級(jí)的特殊要求主要體現(xiàn)在壽命、適應(yīng)車(chē)載環(huán)境等安全層面,然而,消費(fèi)電子芯片廠商通過(guò)這些車(chē)規(guī)級(jí)認(rèn)證的難度并不是特別大。
同時(shí),消費(fèi)電子芯片廠商在消費(fèi)端已經(jīng)具備了足夠強(qiáng)的設(shè)計(jì)能力,從而能夠幫助他們?cè)谙鄬?duì)小眾的汽車(chē)領(lǐng)域里,也能提供類(lèi)似工藝和設(shè)計(jì)的車(chē)規(guī)級(jí)座艙芯片。
消費(fèi)電子芯片廠商不但殺入了座艙領(lǐng)域,為什么還能牢牢霸占座艙領(lǐng)域的高端市場(chǎng)?
1)成本優(yōu)勢(shì)
消費(fèi)級(jí)芯片廠商能夠最大化利用其在消費(fèi)端的生產(chǎn)能力,去攤銷(xiāo)整個(gè)芯片設(shè)計(jì)的成本。因此當(dāng)其把消費(fèi)端的芯片轉(zhuǎn)移到座艙領(lǐng)域來(lái)應(yīng)用,在成本上對(duì)傳統(tǒng)芯片廠商是一個(gè)降維打擊。
諾博汽車(chē)副總經(jīng)理陳禮順說(shuō):“ 座艙的SoC芯片一般都會(huì)包含CPU、GPU、NPU、DSP等等,這些IP設(shè)計(jì)與授權(quán)一般都是來(lái)自第三方公司,比如ARM, Imagination等,對(duì)于傳統(tǒng)汽車(chē)芯片廠商,這些IP的授權(quán)費(fèi)都是非常高的,但對(duì)于高通來(lái)講,一是很多IP都是進(jìn)行自研設(shè)計(jì),二是ARM的架構(gòu)授權(quán)費(fèi)也是要比一些傳統(tǒng)汽車(chē)芯片廠商低很多。”
2)芯片的性能和迭代速度優(yōu)勢(shì)
首先,消費(fèi)電子芯片廠商的座艙芯片在先進(jìn)制程和大算力上具有明顯的優(yōu)勢(shì)。
其次,消費(fèi)電子芯片廠商的座艙芯片迭代速度快。消費(fèi)電子芯片廠商可以在智能消費(fèi)電子芯片迭代的基礎(chǔ)上再去迭代座艙芯片,他們的芯片迭代的速度自然要遠(yuǎn)遠(yuǎn)快于傳統(tǒng)汽車(chē)芯片廠商。
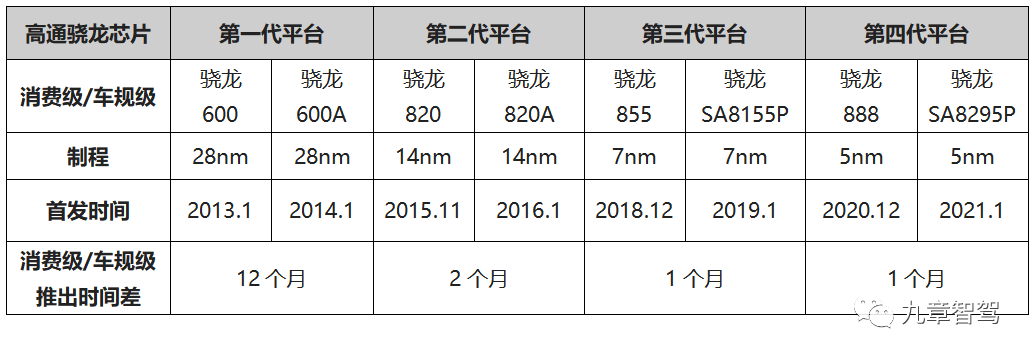
高通四代座艙平臺(tái)的基礎(chǔ)信息(數(shù)據(jù)來(lái)源:公開(kāi)資料整理)
備注:截止目前為止,高通總共對(duì)外發(fā)布了四代座艙芯片,而這四代芯片都是遵循著“消費(fèi)級(jí)芯片先發(fā),智能座艙芯片后改”的底層邏輯。
審核編輯 :李倩
-
芯片
+關(guān)注
關(guān)注
456文章
50889瀏覽量
424301 -
控制器
+關(guān)注
關(guān)注
112文章
16384瀏覽量
178352 -
智能座艙
+關(guān)注
關(guān)注
4文章
955瀏覽量
16373
原文標(biāo)題:智能座艙域控制器技術(shù)發(fā)展趨勢(shì)分析
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
高通分析藍(lán)牙技術(shù)發(fā)展趨勢(shì)
智能密集架控制系統(tǒng)技術(shù)發(fā)展趨勢(shì)
開(kāi)關(guān)電源的最新技術(shù)發(fā)展趨勢(shì)
未來(lái)的ar技術(shù)發(fā)展趨勢(shì)
智能駕駛技術(shù)發(fā)展趨勢(shì)
變阻器的未來(lái)發(fā)展趨勢(shì)和前景如何?是否有替代品出現(xiàn)?
Arm Cortex-R82AE賦能高性能區(qū)域控制器設(shè)計(jì)
無(wú)線充電技術(shù)發(fā)展趨勢(shì)
汽車(chē)區(qū)域控制器架構(gòu)趨勢(shì)下,這三類(lèi)的典型電路設(shè)計(jì)正在改變

汽車(chē)區(qū)域控制器架構(gòu)趨勢(shì)下的SmartFET應(yīng)用
2024年全球與中國(guó)7nm智能座艙芯片行業(yè)總體規(guī)模、主要企業(yè)國(guó)內(nèi)外市場(chǎng)占有率及排名
座艙域控制器硬件架構(gòu)方案:SoC + MCU
智駕、座艙、泊車(chē)三合一域控制器解析

上汽飛凡R7智聯(lián)域控制器模塊TBOX的拆解分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論