 基于深度學習的兩相流氣泡末速度預測
基于深度學習的兩相流氣泡末速度預測
摘要:針對在氣液兩相流中難以進行穩態分析,無法對氣泡末速度進行精準預測的問題,提出一種基于深度學習的氣泡末速度預測方法。首先,搭建了一套高速相機采集系統獲取氣泡圖像,利用圖像處理技術和橢圓擬合算法對氣泡進行圖像分割,進而計算氣泡上升速度,建立關于氣泡末速度的圖像數據集;然后,設計了一種以 VGG 網絡為基礎的回歸網絡模型,并采用遷移學習的方式對 VGG 網絡進行訓練和參數優化,有效地解決了訓練樣本不足、預測精度低的問題,實現了對氣液兩相流中氣泡末速度的精準預測。實驗結果表明:與傳統的定量分析方法相比,基于遷移學習的 VGG 回歸網絡能夠更好地對氣泡圖像進行特征提取,得到更為精準的氣泡末速度預測模型,同時在小樣本數據集中具備較好的泛化能力。
0 引 言
氣液兩相流在生物醫學、石油開采、化工生產等領域普遍存在[1]。泡狀流是氣液兩相流中最基本的流動形態,研究氣泡上升過程中特征參數對掌握泡狀流的運動規律尤其重要,而氣泡末速度是其中的關鍵特征參數之一。國內外學者對氣泡末速度計算方法進行了大量研究,在早期時候,文獻[2]證明了氣泡末速度與氣泡縱橫比和當量直徑有著很大的聯系,并得到了氣泡末速度的經驗關系。文獻[3]提出了一種液體池氣泡在上升過程中的參數化方法。文獻[4]對剪切流中的氣泡橫向運動進行了研究。國內的一些學者也針對不同工況下的氣泡末速度進行了實驗研究和模型計算[5?7],但這些方法大都根據經驗公式以及氣泡上升過程中的受力分析得到氣泡末速度的模型。然而,由于兩相流中的流場變化是不固定的,很難得到一個穩定的狀態對其進行定量分析。另外,這些方法不能很好地提取氣泡的形狀信息,容易丟失其形狀特征參數,無法得到一個精確的氣泡末速度模型。
為了解決上述問題,本文將深度學習[8]的方法用到氣泡末速度的預測當中。隨著神經網絡的不斷發展,誕生了一些優秀的網絡模型,如 VGG Net[9]、Res Net[10]、Dense Net[11]等,其應用領域也在不斷增加[12]。而遷移學習[13]的加入可以有效地解決數據集較少帶來的模型難以訓練的問題[14]。本文將深度學習和圖像處理方法相結合,利用遷移學習的方式對深度學習模型進行訓練,從而得到一種高精度的氣泡末速度預測模型。
1 實驗系統設計和圖像處理方法
1.1 高速相機采集系統
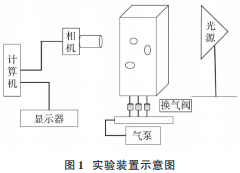
實驗裝置如圖 1 所示,實驗設備由高速相機、光源、氣泵、水箱、進氣閥、計算機等組成。其中,高速相機的拍攝頻率為 500 f/s,實驗采用 LED 背光照射法,水箱規格為 160 mm ×160 mm ×500 mm,液面高度為 300 mm。水箱底部連接多個氣孔,氣孔直徑為 0.8~1.2 mm,用于產生不同大小的氣泡。氣孔與單向氣閥相連,氣閥的另一端接氣泵,通過調節氣閥開度調節進氣量的大小。本文實驗的拍攝高度在距離水箱底部的 260 mm 處,此時的氣泡速度已經基本趨于穩定[15]。
1.2 圖像預處理
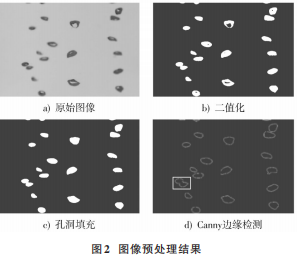
由于氣泡的形狀并不規則,氣泡中心或邊緣由于反光會出現殘缺以及氣泡重疊現象,導致無法準確獲取氣泡的輪廓信息。因此,采用二值化、形態學算法對圖像進行預處理,然后利用 Canny 邊緣檢測算法得到氣泡的輪廓信息,原圖與處理結果如圖 2所示。
1.3 基于最小二乘法的氣泡輪廓擬合
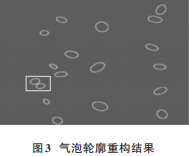
由于氣泡在上升的過程中往往會出現重疊的現象,在進行空洞填充和邊緣檢測時會導致兩個氣泡合并為一,導致無法計算單個氣泡的特征參數。本文利用基于最小二乘法的橢圓擬合算法對氣泡的輪廓進行分割與重構。其原理如下:
令橢圓的一般方程為:

根據式(1)可以唯一確定二維平面內的任意橢圓,利用約束條件 A+B=1使方程避免無解,通過將邊緣檢測中的離散點(xi,yi)代入上述方程,求解式(1)中的各系數。在實際求解過程中,利用最小二乘法求式(2)所示的目標函數的最小值,來求解方程的系數。

根據極值原理,當目標函數有最小值時,必有:

求解此線性方程組,即可得到橢圓方程。
氣泡輪廓重構結果如圖 3所示。
2 基于遷移學習的卷積神經網絡模型的建立
隨著深度學習的不斷發展,先后出現了很多優秀的網絡模型,但是有監督學習的網絡模型的訓練往往需要大量的數據集,而有些特定的場景往往無法得到較多的數據集,因此遷移學習便受到了越來越多的關注。遷移學習就是利用在大型數據集上已經訓練好的數據模型,然后結合本身的小樣本數據集進行優化,從而彌補數據不足的問題。本文分別采用了VGG16和VGG19在ImageNet數據集上的預訓練模型,然后在其基礎上利用實驗獲取的氣泡數據集對網絡的全連接層進行訓練,通過對網絡中參數的調整,最終得到氣泡末速度網絡預測模型。
2.1 網絡的構建
牛津大學的視覺幾何組在 2014年提出了 VGG 網絡結構,該網絡最大創新是使用連續的小卷積核代替大卷積核,并由此增加了網絡的深度,而且使得網絡參數更少,是一種十分經典的網絡結構。為了適應本實驗的研究目標,在其網絡基礎上對最后的全連接層進行了修改,分別得到了B?VGG16和B?VGG19兩種網絡模型,如圖4所示。
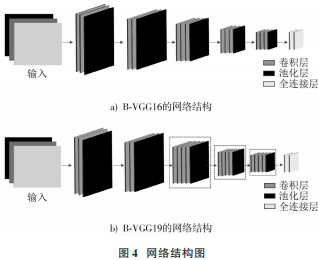
本文的兩種網絡結構分別有 15層和 18層。以基于B?VGG16 的網絡為例,其網絡由 13 個卷積層和 2 個全連接層組成。其中 13 個卷積層分成 5 個模塊,前 2 個模塊分別由兩個 3×3 的卷積層和一個最大值池化層組成,后 3 個模塊在前 2 個的基礎上各自增加了一個 1×1 的卷 積 層 ,最 后 利 用 2 個 全 連 接 層 計 算 網 絡 的 輸 出。B?VGG19 的網絡結構和前者類似,只是在最后的 3 個模塊上各自增加一個 3×3 的卷積層,使得網絡的深度進一步加深。
2.2 數據集的建立
在進行氣泡的末速度計算時,首先利用重構后的氣泡質心計算位移,然后通過像素標定計算氣泡的實際末速度。在進行標定時,將標定尺伸進所測的流體中,等流場靜止后,調整相機位置和焦距,使得標定尺在相機中得到清晰的圖像,本實驗中得到的標定比例為 10.74 pixel/mm。
氣泡末速度 Vt的計算公式如下:

式中:k為標定比例;Δx為氣泡的位移;Δt為圖像時間間隔。
在進行氣泡圖像裁剪時,選用大小為 96×96 的像素。最后通過實驗數據采集得到 200張數據,其中 50張作為測試集,經過數據增強得到 600 張圖像作為訓練集。得到的數據集樣本如圖 5所示。
3 實驗結果與分析
實驗中網絡的訓練是在 GPU 存儲器容量為 16 GB的戴爾工作站 Vostro 中的 Windows 10 系統中運行的。在訓練過程中超參數配置為:epoch 設為 50,batch?size設為 8,初始化學習率為 0.001。
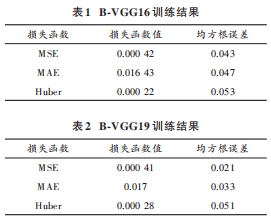
損失函數分別使用 MSE、MAE 和 Huber 的訓練結果,如表 1 和表 2 所示。根據均方根誤差統計結果可以看出,采用 MSE 作為損失函數的訓練效果最好。同時可以看出,B ?VGG19 的訓練結果明顯優于 B ?VGG16。可見,適當的增加網絡深度能夠更好地提取圖片的特征,進而得到更好的預測模型。
不同模型的測試結果如圖 6 所示,B?VGG19 模型的預測結果與實際值更為接近。各個模型的預測精度采用均方根誤差(RMSE)進行評價,結果如表 3所示。
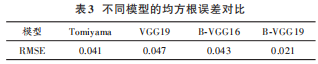
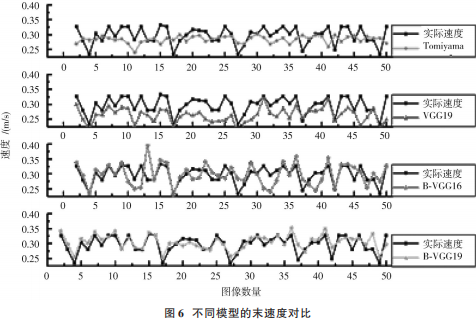
基于深度學習的網絡模型能夠預測出兩相流中氣泡的末速度,而且其預測精度相較于 Tomiyama 經驗公式有明顯的提升。從基于 VGG19 的兩種網絡預測結果可以看出,采用遷移學習訓練的網絡模型相較于直接基于小樣本數據集訓練得到的模型更為精確。
4 結 論
本文提出了一種基于深度學習的氣泡末速度預測模型。針對氣泡圖像數據集的建立,設計了一套基于高速相機的氣泡圖像采集系統,并結合圖像處理的方法對采集的圖片進行預處理操作,利用橢圓擬合算法對重疊氣泡的輪廓進行分割與重構,計算了氣泡的特征參數與速度信息。最后采用基于遷移學習的深度學習模型對氣泡圖像數據集進行訓練和測試。相比傳統的分析方法,本文所提方法克服了其難以進行穩態分析和氣泡形態信息丟失的問題,提高了對氣泡末速度預測的精度。
審核編輯:湯梓紅
-
圖像處理
+關注
關注
27文章
1296瀏覽量
56819 -
深度學習
+關注
關注
73文章
5510瀏覽量
121336
原文標題:基于深度學習的兩相流氣泡末速度預測
文章出處:【微信號:現代電子技術,微信公眾號:現代電子技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
兩相步進電機和配套的兩相步進電機驅動器比較
兩相步進電機的工作原理
兩相步進電機的工作原理
兩相雙極步進電機的驅動 其1

兩相雙極步進電機的驅動 其2
兩相單極步進電機的驅動電路
三相電機怎么裝成兩相電機 如何測量三相電機的好壞
兩相電動機分析






 工商網監
工商網監
評論