") 簡(jiǎn)單全面!一文讀懂自動(dòng)駕駛需要的所有傳感器(推薦)
簡(jiǎn)單全面!一文讀懂自動(dòng)駕駛需要的所有傳感器(推薦)
本文系統(tǒng)介紹高級(jí)駕駛輔助系統(tǒng)(ADAS)和自動(dòng)駕駛所需的激光雷達(dá)、毫米波雷達(dá)、超聲波傳感器和攝像頭傳感器的原理、功能及區(qū)別。
一、傳感器的種類及特征

二、毫米波雷達(dá)的原理和功能
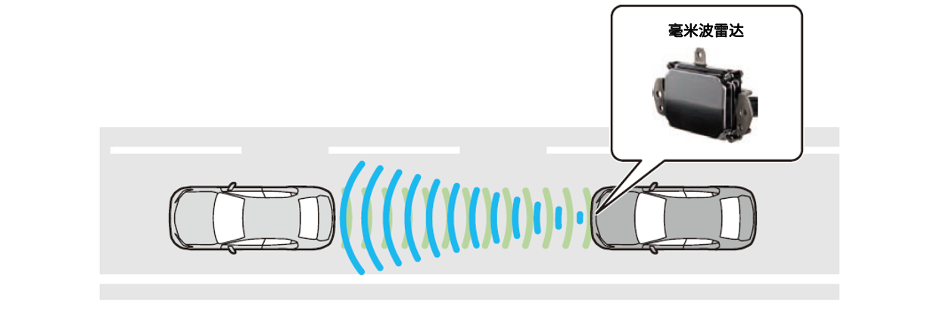
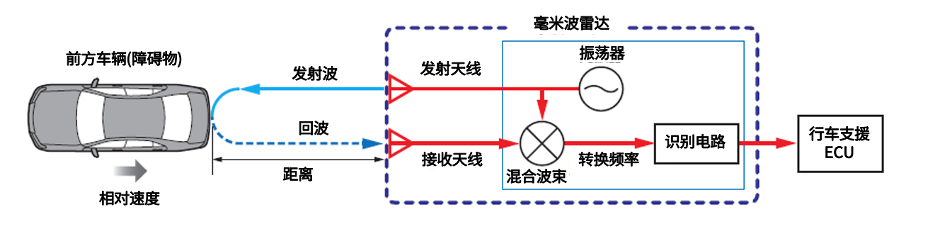
毫米波雷達(dá)是通過毫米波段的電波測(cè)量距離、相對(duì)距離、方向等的雷達(dá)傳感器。在駕駛過程中向前方發(fā)射毫米波段的電波,若前方有車輛,則可收到反射回來的回波。通過分析檢測(cè)到的反射波頻率變化等,檢測(cè)前方及對(duì)面是否有車輛、與前方及對(duì)面車輛間的距離、相對(duì)速度和方向等。
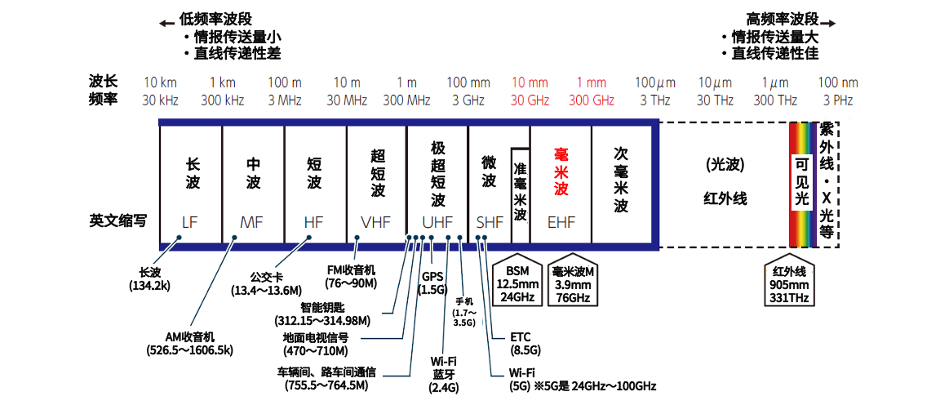
1、毫米波雷達(dá)的分類
車輛上搭載的毫米波雷達(dá)通常使用兩個(gè)波段。毫米波雷達(dá)使用的是76GHz波段的電波(毫米波*1)。BSM使用的是24GHz波段的電波(準(zhǔn)毫米波)。
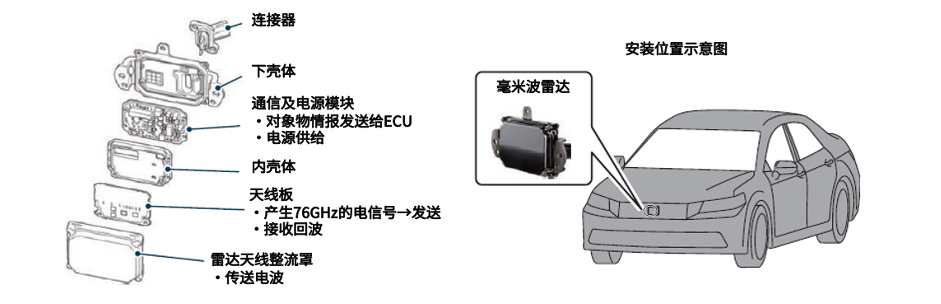
2、毫米波雷達(dá)的構(gòu)成
毫米波雷達(dá)是由天線板、通信及電源模塊等構(gòu)成。
3、毫米波雷達(dá)的原理
通過FM-CW方式*2監(jiān)測(cè)距離、相對(duì)速度和方向。
三、激光雷達(dá)的原理和功能
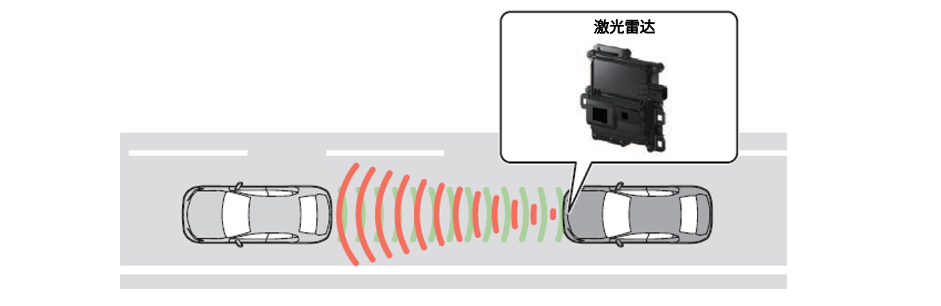
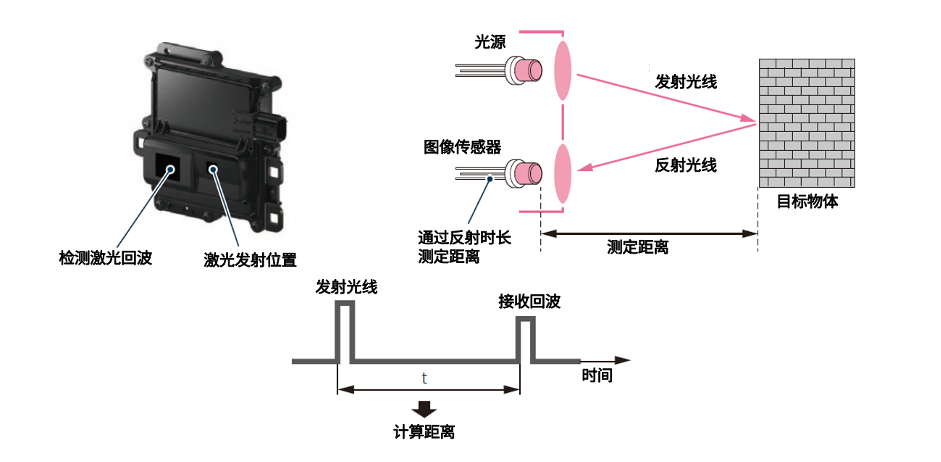
激光雷達(dá)是以發(fā)射激光束探測(cè)目標(biāo)的位置、速度等特征量的雷達(dá)。通過向目標(biāo)發(fā)射探測(cè)信號(hào)(激光),然后將接收到的從目標(biāo)反射回來的信號(hào)(目標(biāo)回波)與發(fā)射信號(hào)進(jìn)行比較,從而獲得目標(biāo)的距離、方位、速度等相關(guān)信息。
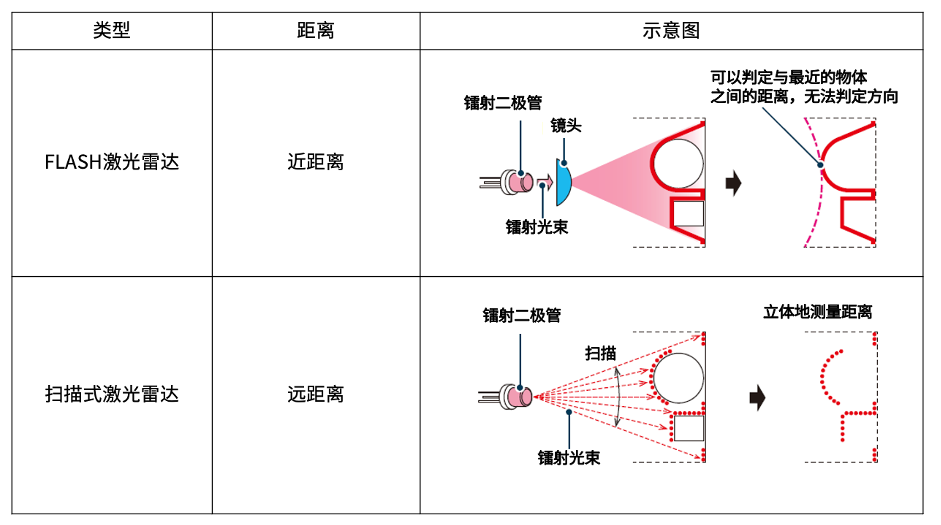
1、激光雷達(dá)的分類
針對(duì)測(cè)量距離的遠(yuǎn)近,激光雷達(dá)可分為非掃描式(FLASH)激光雷達(dá)和掃描式激光雷達(dá)。
2、攝像頭傳感器如何工作?
攝像頭傳感器通過獲取攝像頭拍攝的車輛周邊的實(shí)景畫面,從實(shí)景畫面中抽取場(chǎng)景特征信息、調(diào)整顯像濃度,對(duì)畫面進(jìn)行預(yù)處理。根據(jù)預(yù)處理結(jié)果,更容易辨別對(duì)象的特征及形狀、顏色等信息,從而提高檢測(cè)速度。
3、FLASH激光雷達(dá)
在短時(shí)間內(nèi)向前方發(fā)射大面積的激光,依靠高靈敏度的探測(cè)器對(duì)回波信號(hào)進(jìn)行收集并繪制成像。
4、掃描式激光雷達(dá)
被稱為自動(dòng)駕駛領(lǐng)域中必不可少的傳感器。它可對(duì)車輛自身位置和目標(biāo)物體之間的距離以及目標(biāo)物體的形狀進(jìn)行分析,也可對(duì)包括行車道白線在內(nèi)的道路形狀等進(jìn)行識(shí)別。
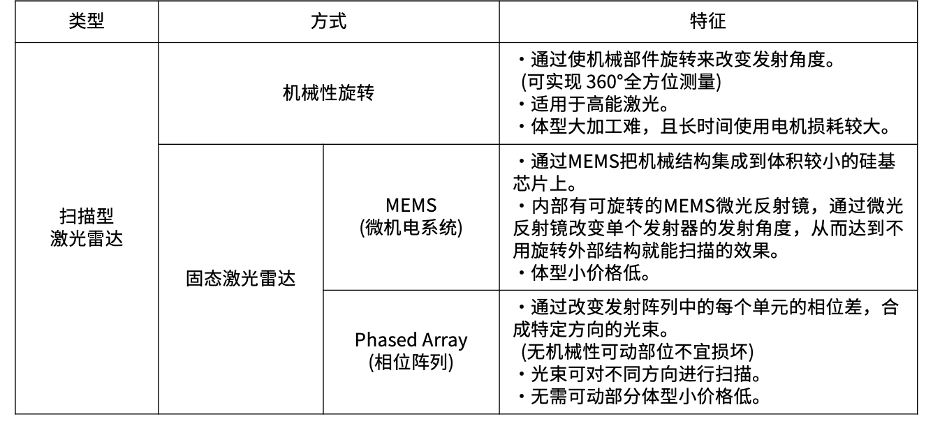
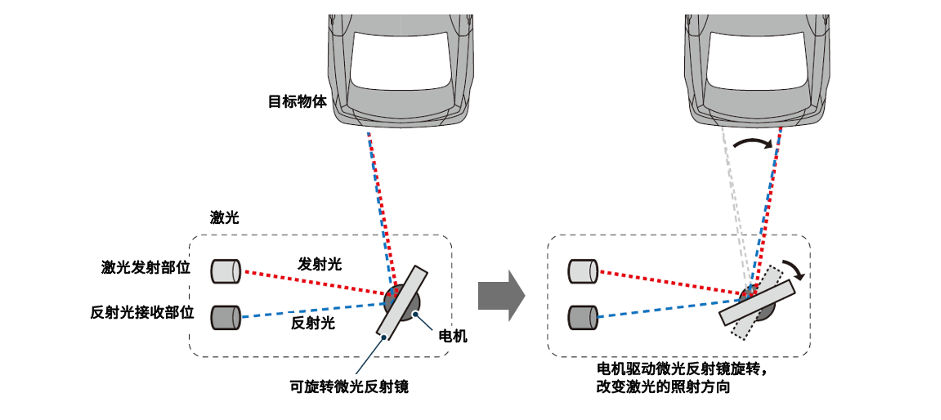
5、MEMS激光雷達(dá)
MEMS(Micro Electromechanical System)即微機(jī)電系統(tǒng),是指尺寸在幾毫米乃至更小的高科技裝置,其內(nèi)部結(jié)構(gòu)一般在微米甚至納米量級(jí),是一個(gè)獨(dú)立的智能系統(tǒng)。
MEMS微光反射鏡是指采用光學(xué)MEMS技術(shù)制造的,把微光反射鏡與MEMS驅(qū)動(dòng)器繼集成在一起的光學(xué)MEMS器件。MEMS微光反射鏡的運(yùn)動(dòng)方式包括平動(dòng)和扭轉(zhuǎn)兩種機(jī)械運(yùn)動(dòng)。
通過可旋轉(zhuǎn)MEMS微光反射鏡改變發(fā)射光束的方向,對(duì)特定范圍進(jìn)行掃描。目標(biāo)物體會(huì)反射掃描光束,接收部件會(huì)識(shí)別反射光。通過發(fā)射激光和接收到反射光的時(shí)間,可以測(cè)定與目標(biāo)物體間的距離以及目標(biāo)物體的大小。
四、超聲波傳感器的原理和功能
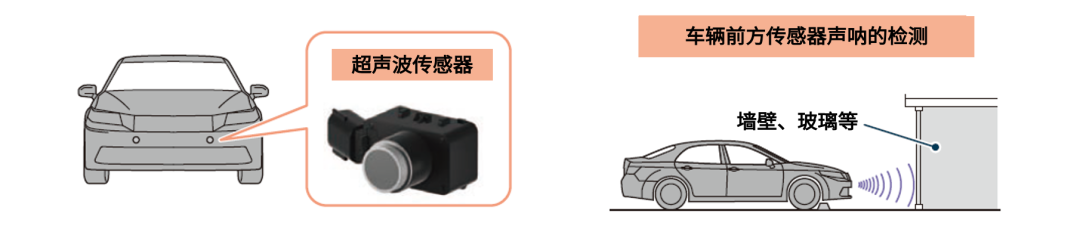
超聲波傳感器能被任何材質(zhì)的障礙物所反射,并接收和放大障礙物反射的超聲波脈沖,將超聲波脈沖轉(zhuǎn)換成數(shù)字信號(hào)。
因此超聲波傳感器一直被廣泛地應(yīng)用在汽車上,為駕駛員的安全出行提供輔助。
*參考:超聲波所在頻段人耳無(wú)法聽到。
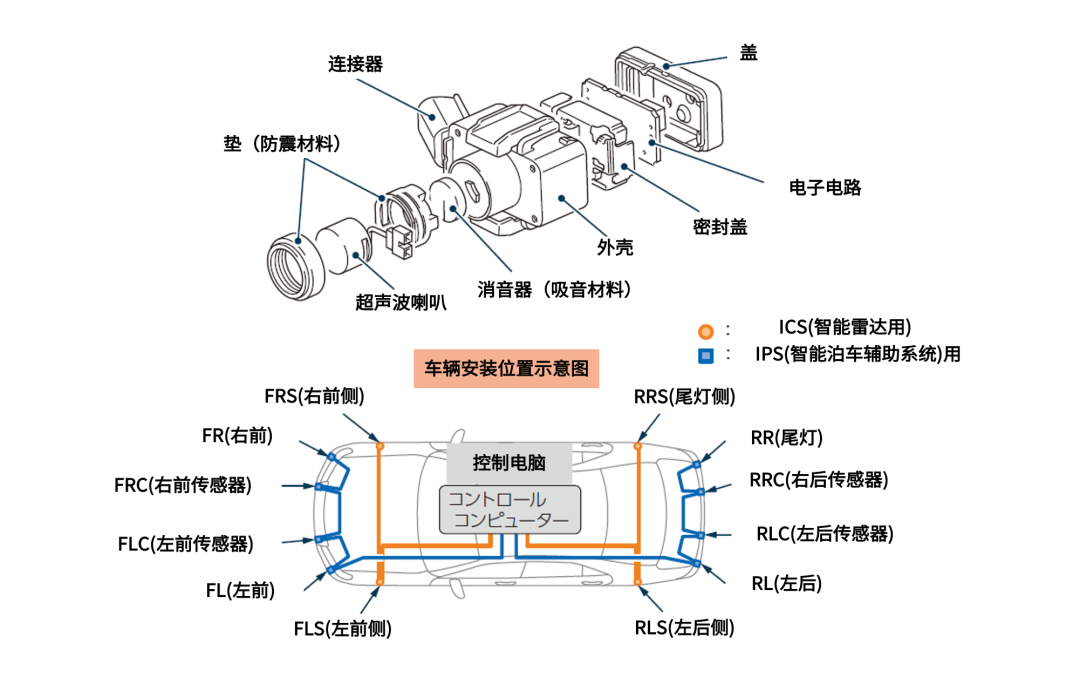
1、超聲波傳感器的構(gòu)成
超聲波傳感器,由超聲波喇叭、用于處理影像和計(jì)時(shí)的芯片等零部件組成。
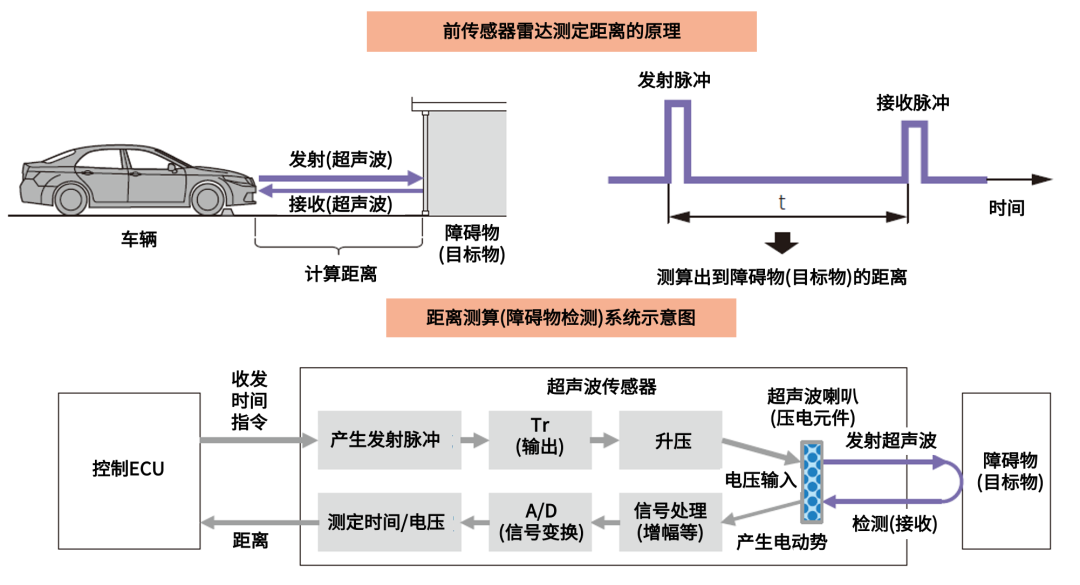
2、超聲波傳感器如何工作?
超聲波發(fā)射器發(fā)出超聲波,超聲波遇到障礙物會(huì)返回,超聲波傳感器正是根據(jù)發(fā)射波和回波之間的時(shí)間差來測(cè)定發(fā)射點(diǎn)到障礙物的實(shí)際距離。
3、怕臟的超聲波傳感器
但是強(qiáng)大如超聲波傳感器可是很怕臟污的,應(yīng)始終保持表面干凈。因?yàn)楫?dāng)其被異物附著時(shí),超聲波喇叭的震動(dòng)(殘響時(shí)間*1)會(huì)發(fā)生異常。例如超聲波喇叭上附著霜(冰)、雪、泥等異物時(shí),會(huì)影響超聲波喇叭的正常功能。
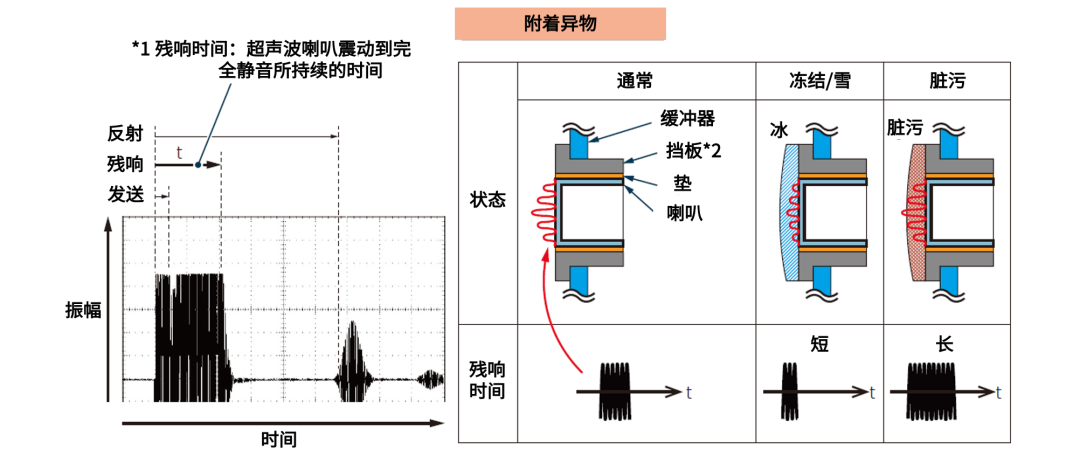
*2參考:擋板即護(hù)圈(保護(hù)零件),相當(dāng)于超聲波傳感器嵌入車輛的緩沖器。
五、攝像頭傳感器的原理和功能
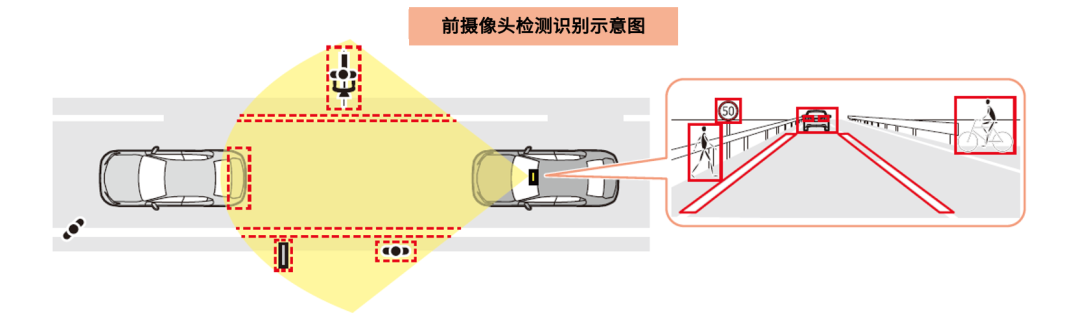
攝像頭傳感器,顧名思義就是通過攝像頭拍攝車輛周邊場(chǎng)景,并以此來識(shí)別車輛、行人、行車線等的傳感器。從拍攝到的影像可以檢測(cè)出車輛及車燈、行車道的白線及標(biāo)識(shí)、行人及自行車等。
1、攝像頭傳感器的分類和構(gòu)成
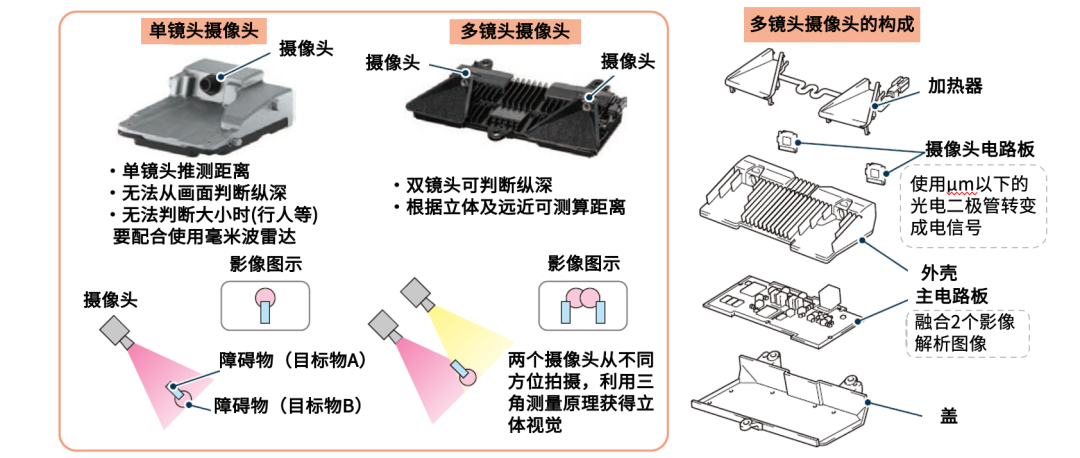
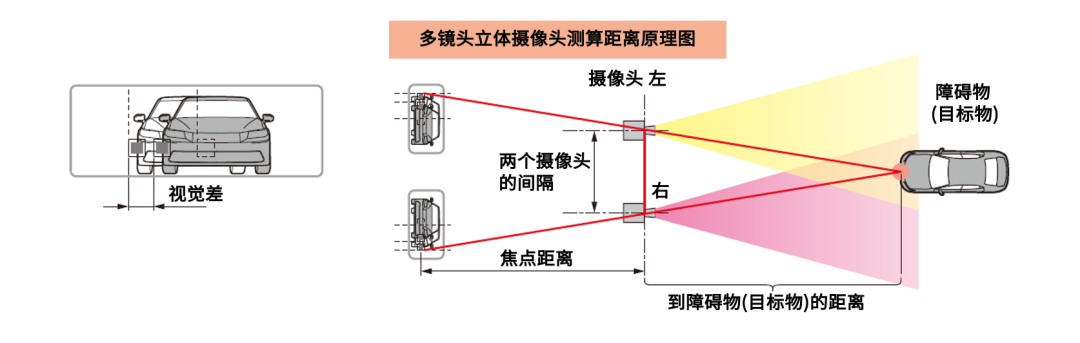
攝像頭傳感器分為單鏡頭攝像頭和多鏡頭立體攝像頭兩種。單鏡頭攝像頭識(shí)別的是平面影像,而多鏡頭立體攝像頭內(nèi)置2個(gè)攝像頭,除了可以識(shí)別立體物體,還可以測(cè)算到目標(biāo)物體的距離。
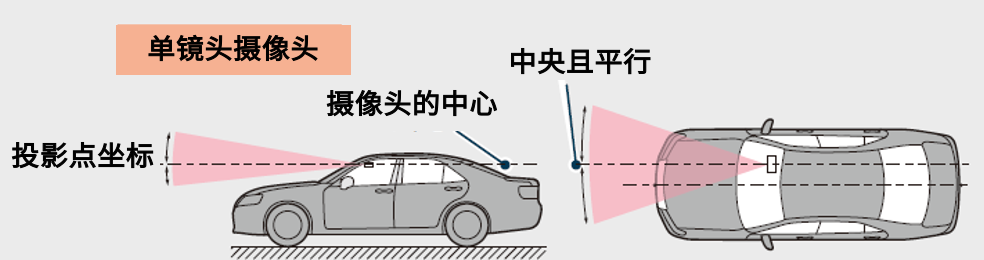
*參考:投影點(diǎn)坐標(biāo)的位置不精確會(huì)影響檢測(cè)精度。請(qǐng)確保鏡頭已得到充分的校正、調(diào)整。
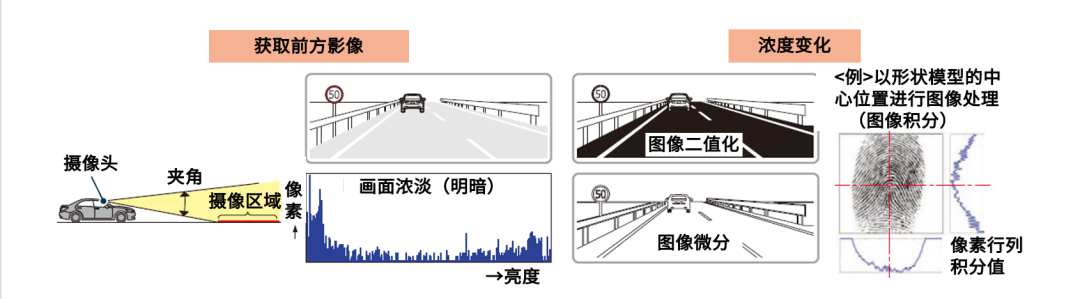
2、攝像頭傳感器如何工作?
攝像頭傳感器通過獲取攝像頭拍攝的車輛周邊的實(shí)景畫面,從實(shí)景畫面中抽取場(chǎng)景特征信息、調(diào)整顯像濃度,對(duì)畫面進(jìn)行預(yù)處理。根據(jù)預(yù)處理結(jié)果,更容易辨別對(duì)象的特征及形狀、顏色等信息,從而提高檢測(cè)速度。
3、目標(biāo)物體處理流程
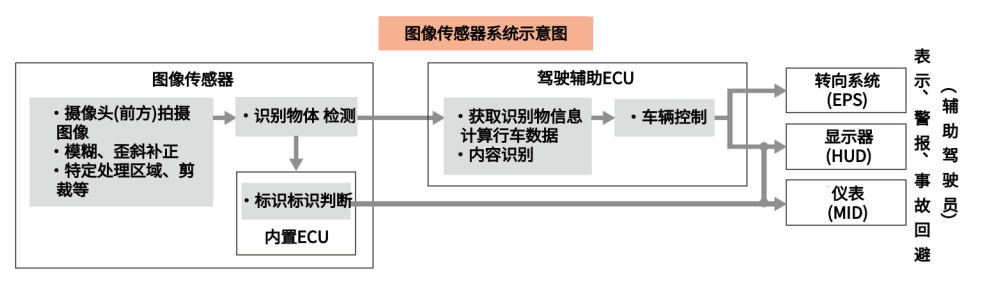
圖像傳感器通過圖像處理識(shí)別對(duì)象物體,根據(jù)駕駛輔助ECU檢測(cè)到的信息進(jìn)行內(nèi)容識(shí)別、判斷、控制車輛。
4、檢測(cè)車道
從經(jīng)過處理的圖像上抽取邊緣畫面(亮度變化大的區(qū)域),從邊緣畫面中找出行車線標(biāo)記(車道兩側(cè)的實(shí)線及虛線,直道顯示為直線),通過行車線標(biāo)記測(cè)定車道。
基于行車線信息獲取車道中央位置、車輛行進(jìn)方向及測(cè)算距離,從而識(shí)別、判斷、控制車輛。
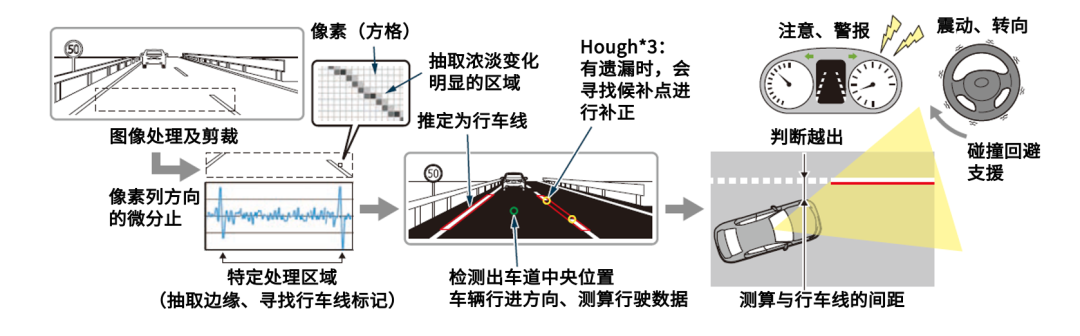
※參考3:Hough (霍夫變換)用于檢測(cè)圖像中的各類曲線(如直線、圓、拋物線、橢圓等),并以一定的函數(shù)關(guān)系進(jìn)行描述,應(yīng)用于影像分析、模式識(shí)別等很多領(lǐng)域。
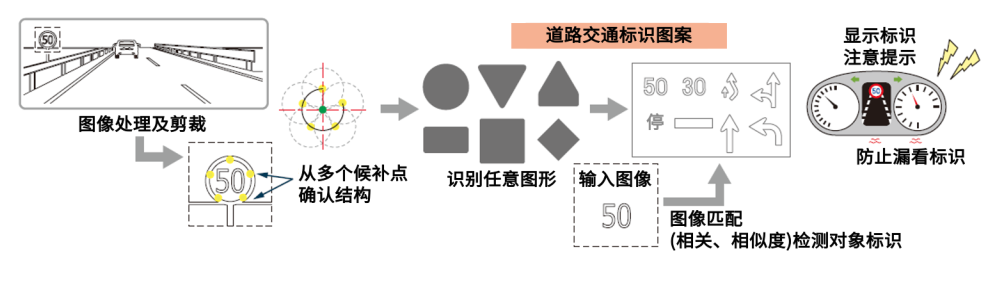
5、檢測(cè)道路標(biāo)識(shí)
從經(jīng)過處理的圖像上抽取對(duì)應(yīng)的候補(bǔ)點(diǎn),尋找由各點(diǎn)分布構(gòu)成的直線、曲線、平面等任意圖形,按照特定的模板推定標(biāo)識(shí)。通過標(biāo)識(shí)信息進(jìn)行判斷并控制車輛。
6、檢測(cè)行人
人物圖像由于體型、姿勢(shì)、衣著等因素影響較難識(shí)別。因此,從圖像中區(qū)分出靜止的背景和運(yùn)動(dòng)的人物,需要根據(jù)模型化部位(手腳等較大部位的圖形)以及統(tǒng)計(jì)性特征(全身圖像等)進(jìn)行識(shí)別,符合特征的則被判定為行人。根據(jù)車輛與行人間的位置關(guān)系及測(cè)算的距離,識(shí)別、判斷、控制車輛。

7、多鏡頭立體攝像頭
單鏡頭攝像頭拍攝到的某一個(gè)圖像,在轉(zhuǎn)化成二次元畫面時(shí),由于缺少目標(biāo)物體縱深數(shù)據(jù)導(dǎo)致無(wú)法進(jìn)行立體識(shí)別。而多鏡頭立體攝像頭融合了2個(gè)攝像頭拍攝的圖像從而獲得視覺差,并利用視覺差使用三件測(cè)量的方式計(jì)算出縱深數(shù)據(jù)。因此,立體地識(shí)別目標(biāo)物體的大小及形狀
六、寫在最后
除霧降溫不可少。
確保攝像頭視野,圖像傳感器和鏡片密封玻璃(前置攝像頭)間配備鏡頭加熱器。通過監(jiān)控車外溫度,鏡頭加熱器加熱除霧。當(dāng)攝像頭前方視野模糊時(shí),圖像傳感器將停止工作。
另外,車輛在酷熱等環(huán)境下停放后,圖像傳感器的溫度會(huì)變得很高,可能會(huì)影響識(shí)別功能甚至過熱停機(jī)。(溫度降低后將正常工作)
審核編輯 黃昊宇
-
傳感器
+關(guān)注
關(guān)注
2552文章
51288瀏覽量
755162 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13896瀏覽量
166694
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
物聯(lián)網(wǎng)中的傳感器類型解析 傳感器類型在自動(dòng)駕駛中的應(yīng)用
多傳感器融合在自動(dòng)駕駛中的應(yīng)用趨勢(shì)探究

一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛汽車如何識(shí)別障礙物
自動(dòng)駕駛識(shí)別技術(shù)有哪些
自動(dòng)駕駛的傳感器技術(shù)介紹
自動(dòng)駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動(dòng)駕駛設(shè)備中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論