 新型陣列式微慣性測量系統實現準確位置和姿態數據采集
新型陣列式微慣性測量系統實現準確位置和姿態數據采集
慣性導航是目前國內緊缺的高新技術,市場需求多、發展潛力大。MEMS慣性傳感器雖然具有微型化、成本低等優點,然而,單一的消費級MEMS慣性傳感器存在測量誤差大、穩定性差等缺陷,這會導致MEMS慣性導航系統獲取的姿態、運動數據精度差,無法滿足高新產業的發展需求。因此研究價格低、精度高、穩定性好的微慣性測量系統是十分有必要的。
據麥姆斯咨詢報道,針對消費級MEMS慣性傳感器測量誤差不佳、穩定性不好,無法服務于高精度的應用,以及工業級MEMS慣性傳感器價格昂貴等缺陷,蘇州大學的研究團隊通過研究陣列式MEMS微慣性測量單元(IMU)技術方案,設計了一款新型陣列式微慣性測量系統,精度相較于單個慣性傳感器提升至少5.7倍,實現準確位置和姿態數據的采集,具有精度高、體積小、應用廣泛的特點。相關研究成果已發表于《電子電路設計與方案》期刊。
該陣列式MEMS-IMU系統的硬件結構主要包括MEMS傳感器陣列模塊、微處理器模塊、并行數據總線,傳感器陣列模塊由32個消費級微慣性傳感器CM20948構成,負責感知環境,采集當前的加速度、角速度數據。軟件系統中設計了數據采集、分析、標定算法,通過并行數據總線實現多個傳感器的同步數據獲取,并且對多個傳感器進行多數據融合處理,使得該設計系統采集到的數據延遲很小。系統體積小巧,整個電路板的尺寸僅為40mm × 61mm × 9mm,具有很高的便攜性和性價比。
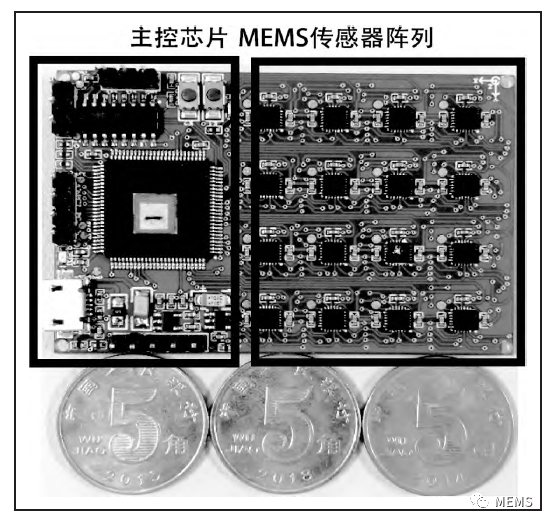
圖1 陣列傳感器硬件實物
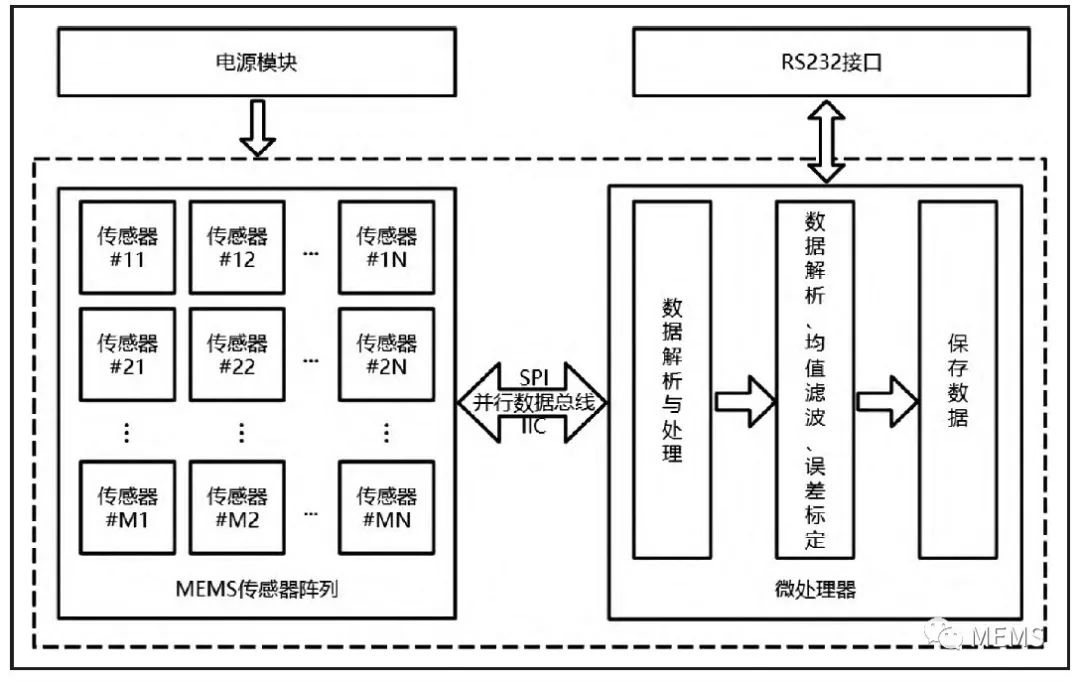
圖2 系統硬件結構圖
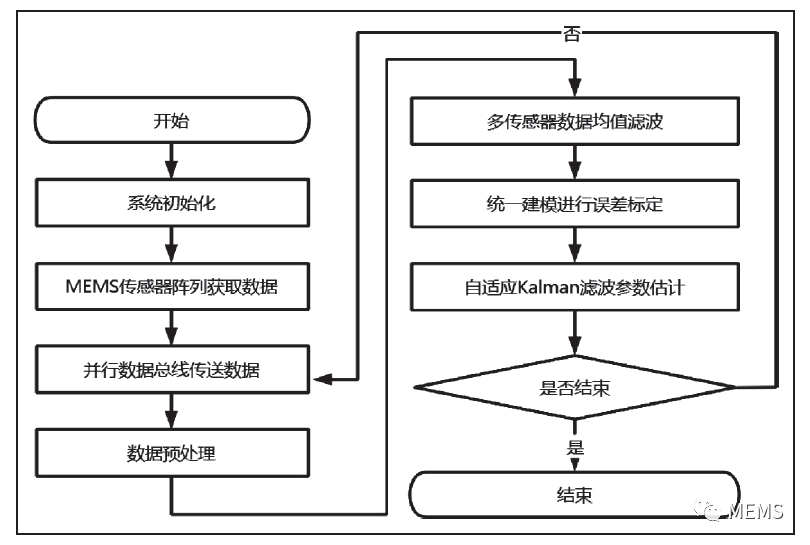
圖3 程序運行示意圖
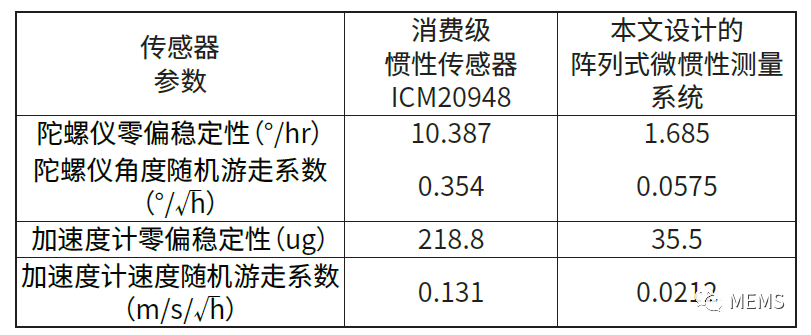
Allan方差是量化噪聲的一種常用方法,適用于鑒別測量數據中不同類型的噪聲,可以用來評估傳感器參數穩定性,Allan方差的值越小,傳感器精度越好。測試結果表明,該陣列式MEMS-IMU系統的Allan方差顯著好于單個消費級慣性傳感器。相較于單個慣性傳感器,測量精度提升了約5.7倍,能夠實現準確位置和姿態數據的采集。
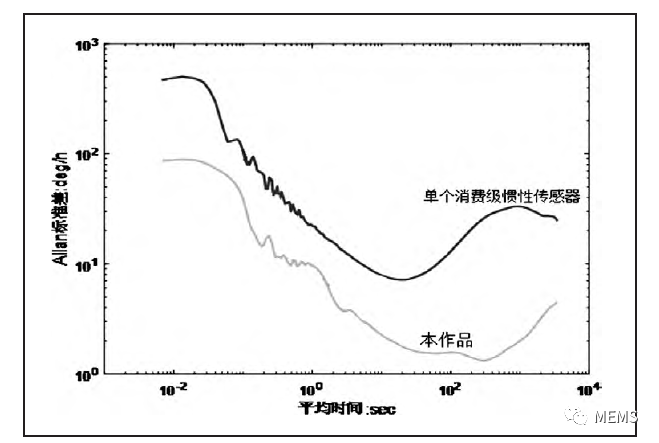
圖4 陣列式MEMS-IMU系統與單個慣性傳感器Allan方差性能對比
表1 陣列式微慣性測量系統性能參數
該新型陣列式MEMS-IMU系統能夠穩定、準確地測量出載體的加速度、角速度,實現實時監測載體運動情況,具備高精度、小體積的特點,具有一定的實用價值。
審核編輯:郭婷
-
傳感器
+關注
關注
2551文章
51103瀏覽量
753608 -
測量系統
+關注
關注
2文章
538瀏覽量
41395
原文標題:陣列式MEMS-IMU系統的設計與實現
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
可與MES系統集成的數據采集監控平臺
陣列式位移計生產廠家:什么是陣列式位移計
數控機床數據采集如何實現?

振弦式土壓力計的數據采集方法
PLC采集網關如何實現多品牌PLC數據采集
多通道數據采集系統的設計的意義
多通道數據采集串擾問題怎么解決
多通道數據采集系統的轉換誤差怎么算
數據采集系統的組成、工作原理、關鍵技術和應用場景
工控系統PLC、DCS、SCADA數據采集如何實現

如何實現更高精度的同步測量?如何做好同步數據采集的時間校準?
RTU數據采集終端的工作原理






 工商網監
工商網監
評論