 HPM6750芯片實現HMI與四軸伺服運動控制方案
HPM6750芯片實現HMI與四軸伺服運動控制方案
當前工業應用多軸伺服運動控制系統對響應時間、響應速度和穩定性等指標要求越來越高,傳統四軸伺服運動控制系統多采用模塊化方式集成,HMI+Ether CAT/NVUC等控制器+伺服驅動器(多個組成)的拓撲結構,所掛載的伺服驅動器越多,數據傳輸和處理越復雜,控制精度、實時性、同步性能也相應受限。
四軸伺服電機方案介紹
本方案單芯片實現HMI與四軸伺服運動控制,無需總線通信反饋與交互控制,片內完成所有數據采集、處理和顯示,對伺服控制和四電機的同步控制效率大大提高,如下演示視頻為通過UI交互下的四軸伺服電機運動。
HPM6750芯片資源介紹
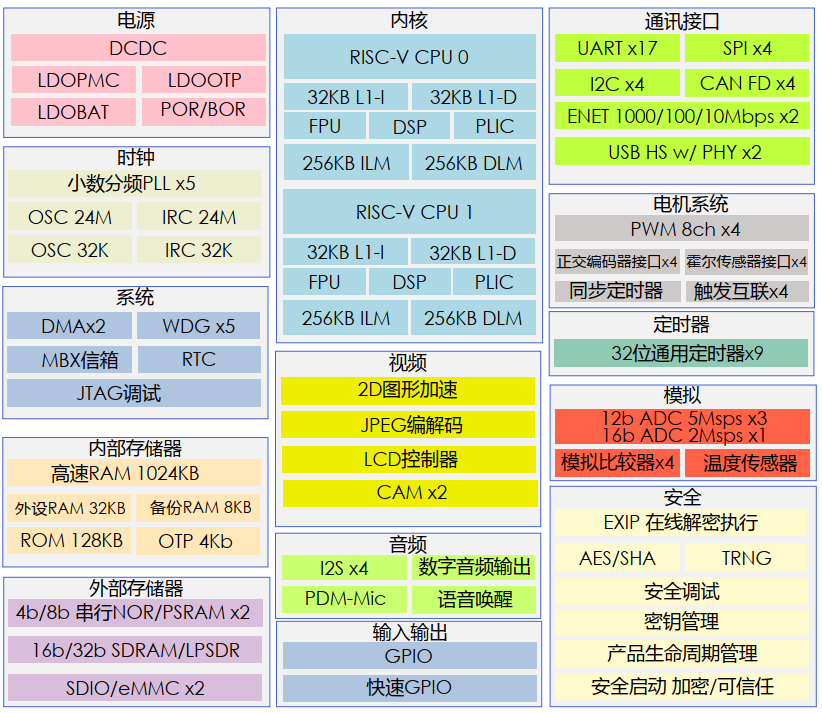
HPM6750采用雙RISC-V內核,主頻達816MHz ,憑借先楫半導體的創新總線架構、高效的L1緩存和本地存儲器,創下了MCU 高于 9000 CoreMark和 4500以上 的DMIPS性能新記錄,創造了RISC-V 全球主頻和跑分新紀錄。除了高算力RISC-V CPU,HPM6700系列產品還創造性地整合了一系列高性能外設:包括支持2D圖形加速的顯示系統、高速USB、千兆以太網、CAN FD等通訊接口,高速12位和高精度16位模數轉換器,面向高性能電機控制和數字電源的運動控制系統。
HPM6750電機控制單元介紹
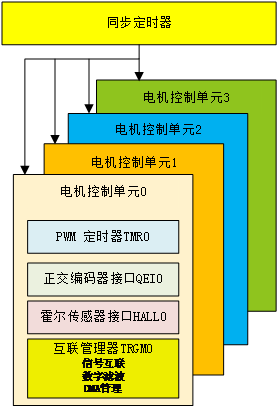
HPM6750系列支持4套電機控制單元,每個單元包括1個PWM定時器,一個正交編碼器接口,一個霍爾傳感器接口和1個互聯管理接口,配合片上提供的數模轉換ADC模塊和ACMP等外設,可以實現同時控制4個電機。包含1個同步定時器,可以用于4套電機控制單元間進行同步。
1、PWM定時器
支持4個PWM定時器,單個PWM支持高達28位計數,支持24個通道;
2、同步定時器
當計數器計數達到比較值會輸出一個比較事件,可以連接到其他定時器用作同步;
3、正交編碼器接口QEI
支持4個正交編碼器接口QEI,用以測量感應電機位置信息;
4、霍爾傳感器接口HALL
支持4個霍爾傳感器接口HALL;
5、互聯管理TRGM
支持多個外設的輸入輸出信號可以相互連接,使得多個外設可以相互配合使用;
支持數字濾波,互聯管理器支持管理外設DMA請求;
6、模擬外設
支持3個12位ADC,支持20個輸入通道,支持單端和差分輸入,高達5M采樣率;
支持1個16位ADC,支持8個輸入通道,高達2M采樣率。
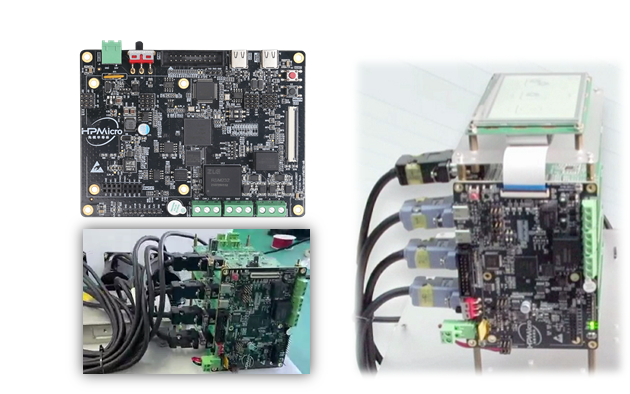
四軸伺服驅動評估板
視頻中實現UI顯示和四電機控制的評估為Four-Motor-HPM6750-MB評估板,該板設計上有4個電機專用接口,支持4個電機驅動板同時插入使用,同時控制4個電機。每個接口支持1路母線電壓采集、3個相電流采集、6通道PWM控制,共支持4路編碼器輸入,硬件正交解碼獲取轉子位置,實現伺服FOC控制。
審核編輯:郭婷
-
芯片
+關注
關注
455文章
50812瀏覽量
423583 -
半導體
+關注
關注
334文章
27362瀏覽量
218646 -
總線
+關注
關注
10文章
2881瀏覽量
88082
原文標題:四軸伺服+HMI單芯片解決方案
文章出處:【微信號:立功科技,微信公眾號:立功科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
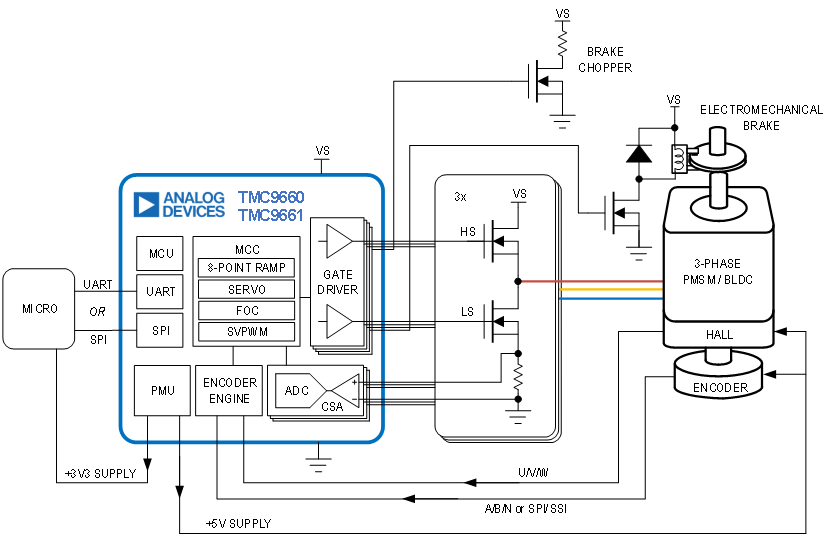
TMC9660高集成伺服電機驅控芯片集成70V智能柵極驅動硬件伺服運動控制和單電源Buck轉換器
高效驅動開啟精密控制時代│先楫HPM6E00伺服驅動器方案
HPM6750 Bootloader設計
HPM6750evkmini如何實現可信的執行環境?
hpm_manufacturing_tool linux 版本 選擇 hidraw 連接等待超時
VPLC系列機器視覺運動控制一體機在五軸聯動點膠上的應用
機器視覺控制軸運動原理是什么
基于S3C2440和專用DSP的嵌入式四軸運動控制器
基于VPLC711的曲面外觀檢測XYR運動控制解決方案
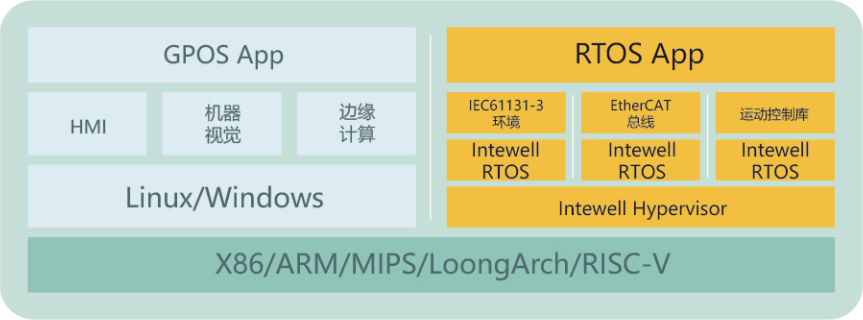
鴻道(Intewell)操作系統為運動控制系統提供國產工業軟件替代方案





 工商網監
工商網監
評論