 激光雷達和APD陣列的發展歷程及進展
激光雷達和APD陣列的發展歷程及進展
激光雷達(LiDAR)廣泛應用于航天器導航、安防監控、3D測繪、自動駕駛汽車、軍事裝備及機器人等領域,具有重要的軍事和民用價值。雪崩光電二極管(APD)陣列探測技術在激光雷達的發展過程中發揮著至關重要的作用。
據麥姆斯咨詢報道,近日,西南技術物理研究所的研究人員在《激光技術》期刊上發表了題為“APD陣列及其成像激光雷達系統的研究進展”的最新論文,首先介紹了激光雷達和APD陣列的應用背景,其次綜述了APD陣列和激光雷達系統的發展歷程和最新進展,最后總結了APD陣列探測技術的發展前景和研究趨勢。
APD陣列國外研究現狀
APD探測器根據探測器的規模經歷了單元、線列、小面陣到大面陣探測的發展歷程,受限于單元探測器的面積,其應用存在諸多限制,但隨著壓縮感知理論的成熟和圖像處理算法的研究,單元探測技術仍然有應用發展空間。APD線列、陣列探測器是目前激光雷達用探測器的主流發展方向之一,其主要由APD探測器件陣列和讀出電路(ROIC)兩部分構成。外界環境噪聲的影響、APD陣列探測器像素單元的一致性、ROIC通道間的串擾是影響其性能和規模的關鍵因素。
線性模式APD陣列研究現狀
美國先進科學概念公司(ASC)基于線性模式的雪崩光電二極管陣列研制了TigerEYE和DragonEYE閃光激光雷達。
2012年,美國雷神公司為各種應用開發了一系列高性能的脈沖激光雷達雪崩光電二極管陣列,如圖1所示,汞鎘汞紅外雪崩光電二極管陣列的尺寸包括32×2、10×10、2×128、64×48、4×256 和256×256。美國國家航空航天局自主精確著陸和危險探測回避技術項目所使用的雪崩探測器陣列是256×256雪崩探測器陣列,具有70%的量子效率。
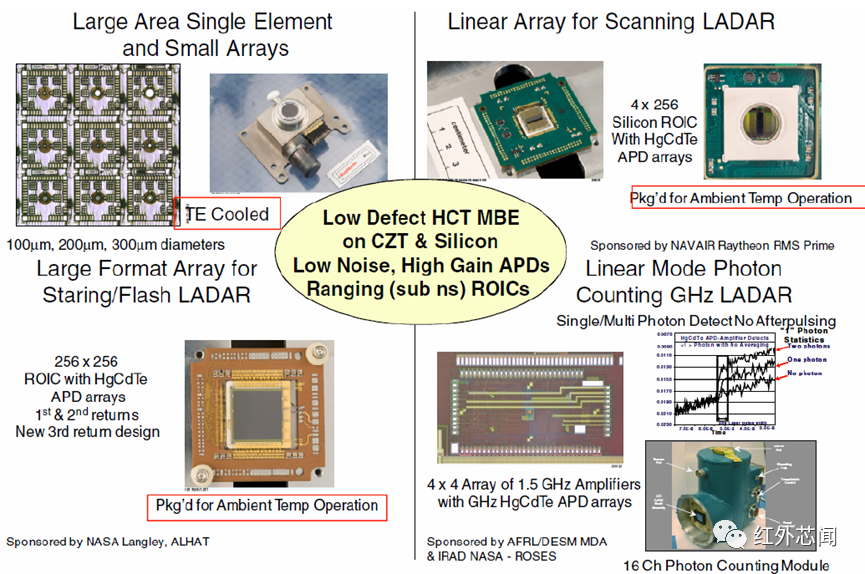
圖1 線性模式雪崩光電二極管陣列
2014年,美國DRS公司設計并制作了基于高密度垂直集成結構的2×8線性模式HgCdTe APD陣列。該陣列可以探測從可見光到中頻中波紅外(MWIR)的光子。此外,還設計了用于近紅外門控主動/被動成像的128×128中波HgCdTeAPD陣列。該陣列的探測距離可達9公里,獲得了小于10光子的靈敏度。用CEA/LETI研制了一臺三維脈沖激光雷達,陣列長度為320×256,間距為30μm。能夠存儲每個像素中一個激光脈沖的TOF和強度。APD陣列在6V的低反向偏置電壓下,獲得了23的平均增益。探測距離超過40m,距離分辨率約為15cm。從三維視頻中提取的距離圖像如圖2所示。
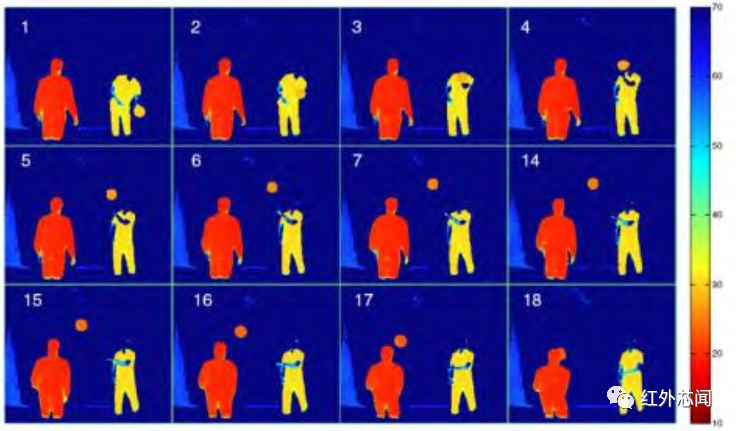
圖2 距離圖像序列
2019年,美國宇航局的孫曉麗、克雷蒙斯等人開發了一套線性模式單光計數HgCdTe APD焦平面陣列, HgCdTe APD陣列使用高密度垂直集成光電二極管架構,如圖3所示。集成探測器(含制冷器)組件的質量為0.8kg,功耗7W左右,2×8像素HgCdTe APD FPA的尺寸為64μm×64μm,像素間距為 64μm,具有0.9~4.3μm波長的光譜響應,在250kHz的暗計數率下,光子探測效率高達70%,時間抖動<0.5ns。
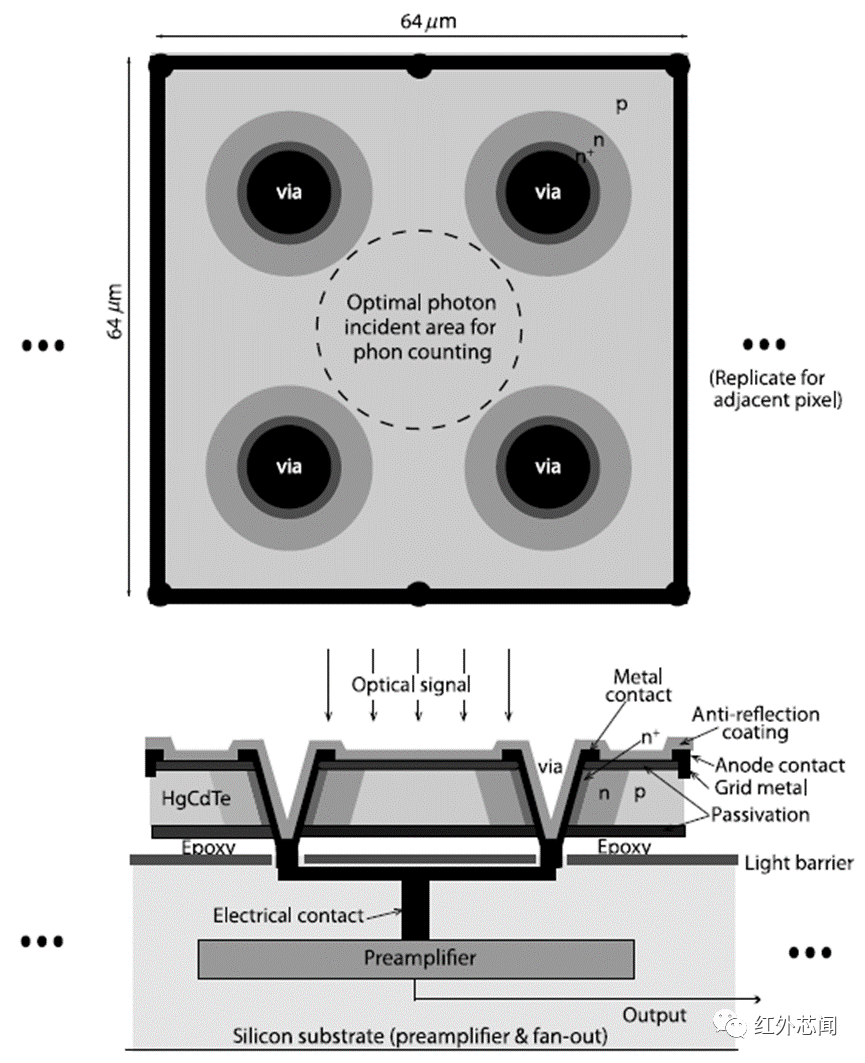
圖3HgCdTe APD的像素示意圖
2020年,美國宇航局蘭利研究中心的普拉薩德、納拉辛哈等人開發出一種創新的、非致冷的光子傳感集成電路(PSIC)異質結光晶體管(HPT)器件。圖4展示了FPA的規格和集成的樣品,這種基于InGaAs的PSIC HPT設備是一種室溫檢測器和成像器,具有320×256規模和30μm尺寸的像素,并在0.9~1.7μm的短波紅外(SWIR)光譜區域工作。
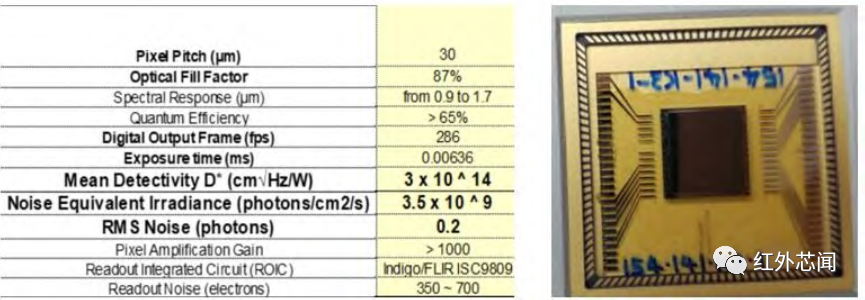
圖4 焦平面探測器規格和集成的樣品
2021年,美國宇航局的孫曉麗、克雷蒙斯、丹尼爾等人開發了一種新型太空激光雷達;它使用了2×8線性模式光子計數的HgCdTe雪崩光電二極管(APD)焦平面陣列探測器如圖5所示,提供了0.9~4.3μm波長的近量子限制的接收器靈敏度。通過調整激光功率和APD增益,可以提供六個數量級的動態范圍,能夠測量從數百公里到目標表面附近的范圍和表面反射率。
蓋革模式APD陣列研究現狀
蓋革APD陣列可實現單光子探測的靈敏度,具有高的時間分辨率和距離分辨率,較高的探測效率,較低的功耗,體積小,增益高等特點,可以滿足遠距離高分辨率三維成像激光雷達的應用需求。
1998-2003年林肯實驗室采用混合集成技術連續研制了GEN-I、GEN-II、GENIⅡ激光雷達。如圖6所示,GEN-III將32×32 APD陣列和32×32 CMOS計時電路陣列混合集成。2010年,該實驗室采用32×128的InP/InGaAsP蓋革APD陣列研制出機載三維成像激光雷達,能夠全天時在3km高空對地面進行2000km2/h的快速三維成像,距離精度為0.3m。2015年,該實驗室研究出近紅外波段響應性能更佳的256像元×256像元InP/InGaAs-APD陣列。
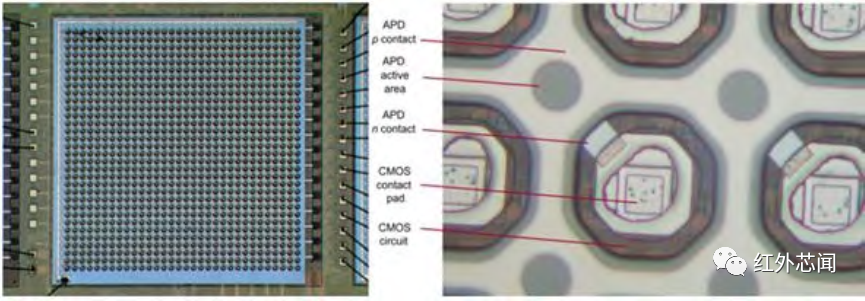
圖6 混合集成APD/CMOS器件的顯微照片
2014年,瑞士洛桑聯邦理工大學報道了一種基于0.18μm CMOS工藝的202像元×96像元SPAD陣列片上系統(SOC)探測器。在強太陽背景光下以10幀/秒的速度在100米范圍內獲得了實時、準確的距離圖像,分辨率為202像素×96像素。圖7左展示了它的系統芯片架構,圖7中為探測器的芯片照片,圖7右最上面部分為顏色編碼TOF距離成像,中間部分為信號穩定性測量結果,最下面為攝像頭拍出的照片,可以清晰辨別出圖中的人物和車子。
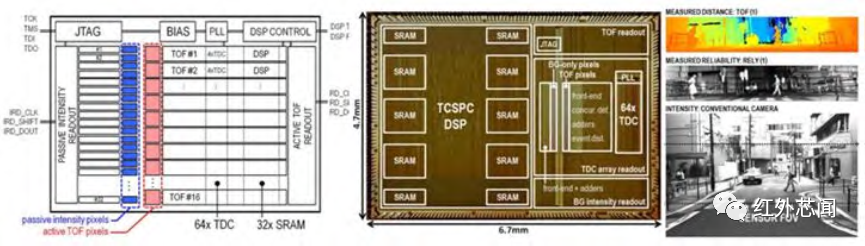
圖7 SOC探測器
2019年,英國的愛丁堡大學的山姆·哈欽斯等人報道了一種集成在三維疊層90nm 1P4M/40nm 1P8M工藝中的256×256單光子雪崩二極管(SPAD)傳感器,如圖8所示,用于LiDAR或高速直接TOF三維成像。傳感器底層由64×64個間距為36.72μm的模塊化光子處理單元組成,這些單元由共享的4×4個SPAD以9.18μm的間距和51%的填充系數運行。
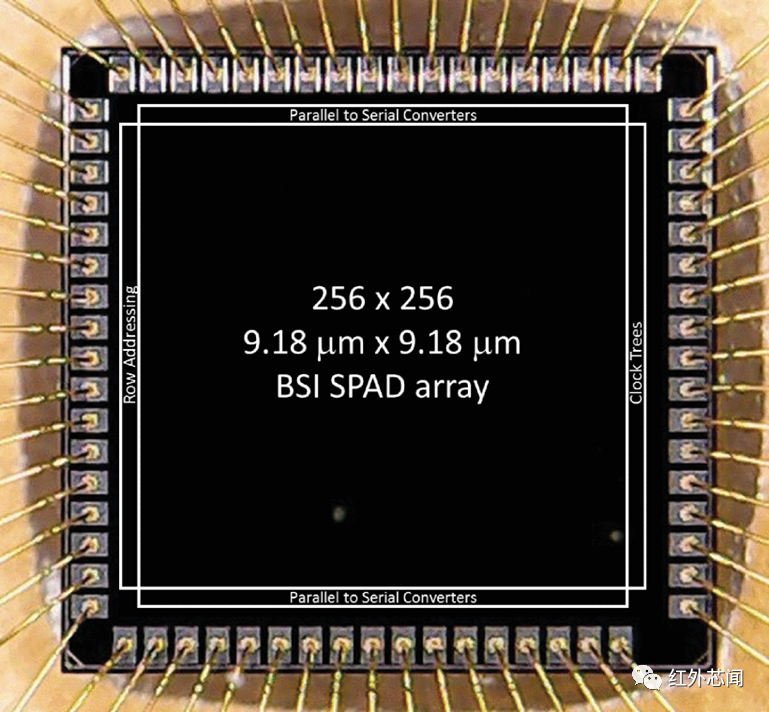
圖8 陣列照片
2020年,美國Acqubit的袁平等人開發了一種具有襯底去除結構的GaAs基InGaP雪崩光電二極管,制作了32Gm×32Gm APD陣列,并與ROIC進行了集成,芯片尺寸約為3.75mm×3.75mm,比顯微鏡的正常視場(FOV)大。在室溫下,在50μm器件上測得的暗電流小于10pA。在532nm處,AR涂層器件的外部量子效率約為54%。圖9展示了它的焦平面圖片。
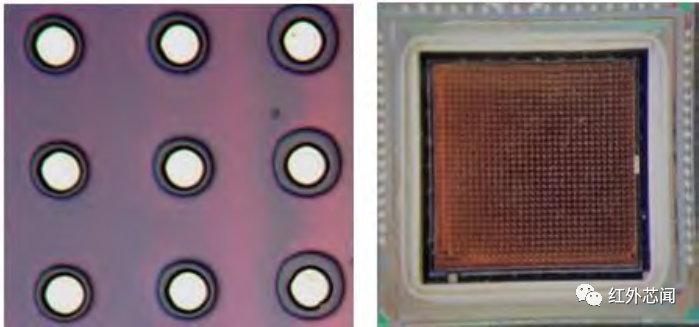
圖9 32×32陣列和焦平面
2022年,瑞士洛桑聯邦理工學院工程學院的趙久軒等人提出了一種基于標準 55nm Bipolar-CMOS-DMOS (BCD) 技術的模擬硅光電倍增管(SiPM),并且將SiPM集成到帶有時間相關單光子計數(TCSPC)模塊的同軸LiDAR系統中。SiPM由16×16 SPAD組成,尺寸為0.29mm×0.32mm。每個SPAD單元由一個3.3V的單片集成MOS管被動熄滅,在5V偏置電壓下測得的增益為 3.4×10?。在3.3V偏置電壓下,單光子計時分辨率為185ps,多光子計時分辨率為120ps。在室內環境光條件下,25m距離測量時的精度為2cm和2mm。如圖10所示,在同軸掃描的情況下,128×256和256×512分辨率的復雜場景的強度和深度圖像。
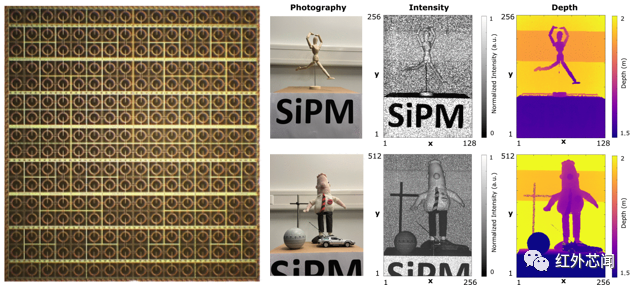
圖10 SiPM陣列圖和深度強度圖像
APD陣列國內研究現狀
線性APD陣列研究現狀
2016年,南京大學開發了一種新型的激光雷達系統,該系統使用4個線性模式APD探測器。利用調制和多路復用技術,僅利用1×4個線性模式APD探即可實現每幀256個像素的檢測,脈沖激光閃光激光雷達的橫向分辨率約為15cm,測距精度約為4cm。
2018年,中國西南技術物理研究所研制了一種64×64線性模式InGaAs/InP 雪崩光電二極管陣列 ,與專用CMOS集成電路通過In柱倒裝互聯工藝混合集成的方式形成了LMAPD-FPA器件。該陣列的最小探測功率為400nW,讀出電路的時間分辨率為1ns。脈沖激光波長為1064nm,脈寬為5ns,單脈沖能量為100mJ,重復頻率為20Hz。檢測范圍為1公里,精度為15厘米。
2018年,北京理工大學提出了一種受復眼和人眼啟發的新型脈沖激光三維成像系統如圖11所示。接收光學系統由18×30個微透鏡組成,分布在曲面上,模擬復眼的大視場特征,整個視場達到52°。
圖11 北京理工大學研制的脈沖激光閃光激光雷達原理圖
2020年,重慶光電技術研究所設計了128×2線性模式硅基雪崩光電二極管陣列。讀出電路采用單片集成技術,將前置放大電路、TDC計時電路和ADC等功能模塊集成在單一硅片上。整個線性模式APD焦平面探測器可實現128×2 陣列規模的激光信號并行檢測。最小時間分辨率可達0.25ns,APD焦平面探測器的非均勻性為7%,串擾為0.15%。
蓋革模式APD陣列研究現狀
2016年,哈爾濱工業大學研制的閃光激光雷達采用第四十四研究所研制出的 32像元×32像元的InGaAsGm-APD焦平 面 探 測 器。脈沖激光波長為1570nm,脈沖能量為2mJ,脈沖寬度小于10ns。測量范圍距離可達3.9公里,幀速率為1kHz。
2019年,中國電子科技集團公司第三十八研究所研制了一種基于64×64 InGaAs蓋革模式雪崩光電二極管陣列的閃光激光雷達,其波長為1064nm,讀出電路的時間分辨率為2ns。實現了對大約300米外的目標進行成像。
目前國內對于SiPM器件的研究報道比較少,2018年,華中科技大學張璽等人基于0.18μm標準CMOS工藝的研制了SiPM器件;2020年,北京師范大學新器件實驗室成功研制出微單元尺寸為15μm、有效面積為9mm2的外延電阻淬滅型硅光電倍增器。
總之,國外對激光雷達的研究較早,在探測器技術方面有較多的技術儲備,目前研究的方向主要是提高探測器規模和成像性能,并實現大面陣,小型化、多波段、高幀頻及低功耗。在探測器技術研究方面,國內與國外仍然存在著一定的差距,由于大規模的APD陣列探測器對各方面技術的要求高,在制作上更難實現,特別是由于半導體工藝的限制以及國外的技術封鎖,國內研究單位多集中于線列和小面陣探測的階段,需要進一步推進大面陣APD陣列探測器研制,提高激光雷達的集成性,實現快速三維成像。
總結
隨著激光器和探測器技術的不斷發展,成像激光雷達逐漸從小面陣掃描和線陣推掃式及面陣閃光成像發展,成像速度越來越快;隨著光電探測技術的成熟,探測靈敏度越來越高,使得激光雷達的體積、重量、功率進一步減小;這就要求探測器技術朝著增大陣列規模,減小像元間距,提高多功能集成度,豐富探測波段,超低功耗的方向發展。因為激光容易受到大氣狀況的干擾,現代探測技術的發展趨向于多種傳感器的融合探測獲取更豐富的目標信息,三維成像趨向于主動多回波探測和被動成像相結合。
審核編輯:郭婷
-
探測器
+關注
關注
14文章
2646瀏覽量
73062 -
激光雷達
+關注
關注
968文章
3981瀏覽量
190022
原文標題:綜述:APD陣列及其成像激光雷達系統的研究進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達技術的發展趨勢
光學雷達和激光雷達的區別是什么
一文看懂激光雷達

卷上天的激光雷達,現在發展到哪一步?研報推薦

基于FPGA的激光雷達控制板

硅基片上激光雷達技術綜述

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論