") AUTOSAR CAN網(wǎng)絡(luò)管理報文的數(shù)據(jù)場格式
AUTOSAR CAN網(wǎng)絡(luò)管理報文的數(shù)據(jù)場格式
在網(wǎng)絡(luò)管理中,網(wǎng)絡(luò)中的各個節(jié)點通過網(wǎng)絡(luò)管理報文進 行通信,AUTOSAR CAN網(wǎng)絡(luò)管理報文的數(shù)據(jù)場格式見表

注意:NM報文就是CAN報文。NM報文符合CAN報文的格式,由幀起始、仲裁場、控制場、數(shù)據(jù)場、CRC場、應答場、幀結(jié)尾組成。
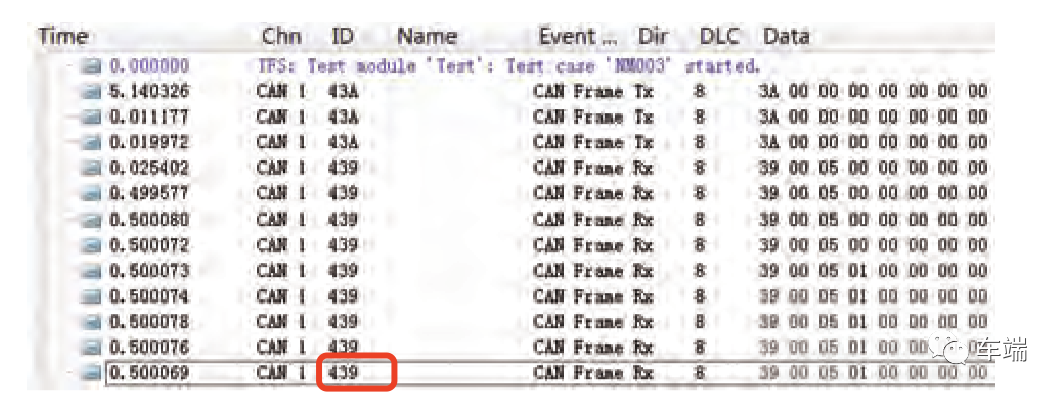
一般廠家在設(shè)計的時候會規(guī)定好NM報文的ID范圍。
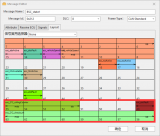
舉個例子:規(guī)定標識符在0x500到0x5FF范圍為NM報文。當在CANoe中抓取到此ID范圍內(nèi)的報文,那就是NM報文。如下圖中的例子:報文ID= 0x502;
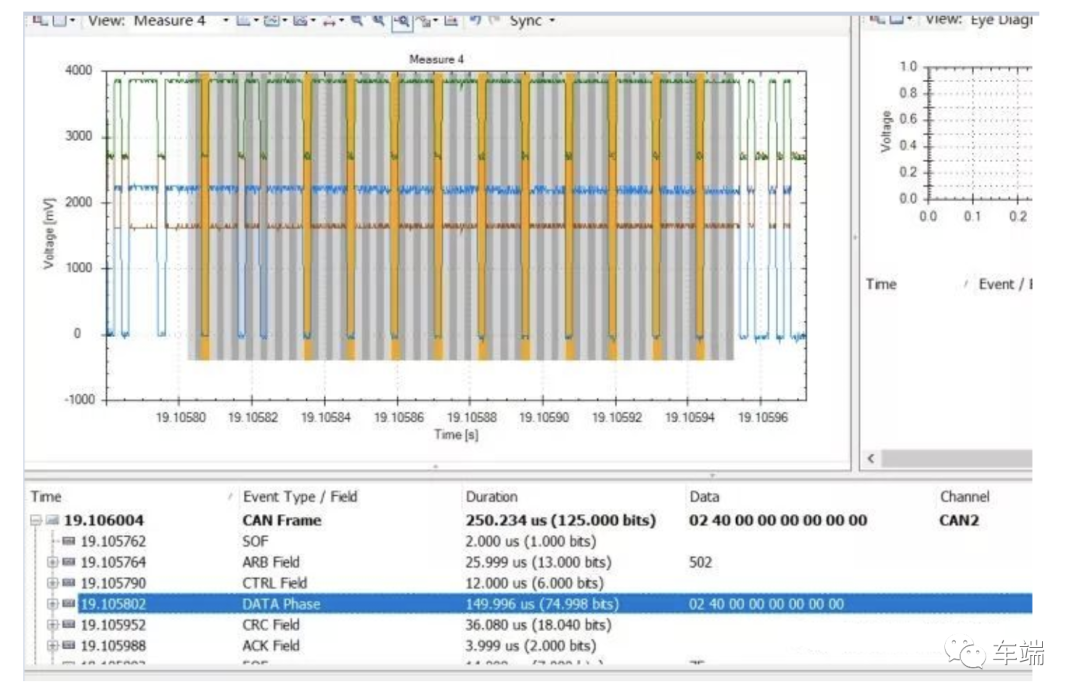
表1中,字節(jié)0為ECU Address,作為源節(jié)點標識符,用 以告知其他節(jié)點該報文是由哪個節(jié)點發(fā)送的;處于CAN網(wǎng) 絡(luò)中的每個節(jié)點都會分配一個唯一的標識符,本文中網(wǎng)絡(luò) 管理報文的ECU Address=0x439。此報文的ID=一個基礎(chǔ)值+ECU的ID,例如廠家規(guī)定基礎(chǔ)值為0x400,那么此報文的ID=0x500+0x39=0x439。
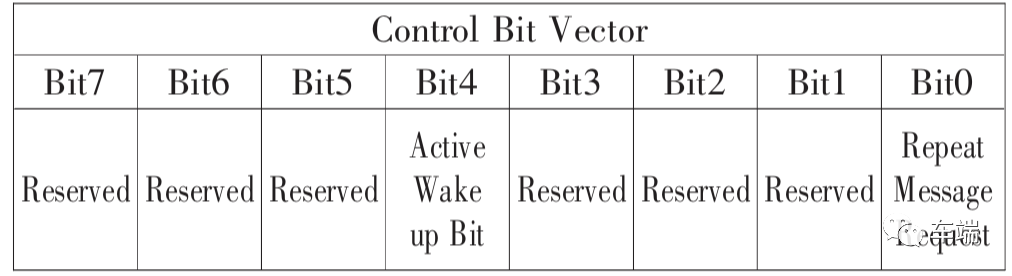
字節(jié)1為控制比特向量, 字節(jié)2~7為用戶自定義的數(shù)據(jù)信息。本文中字節(jié)2User date 0 用于將網(wǎng)絡(luò)喚醒原因顯示出來,其他自定義數(shù)據(jù)作為擴展 保留,用“0x00”填充。表2列出了控制比特向量各位的含 義。其中Bit0為重復報文狀態(tài)請求位,置1代表需進入重復 報文發(fā)送狀態(tài),清零代表不再需要重復報文發(fā)送狀態(tài);Bit4位為激活喚醒位,置1代表主動喚醒狀態(tài),清零代表被 動喚醒狀態(tài)。其他位為保留位,以0填充。Byte1:control bit vector定義如下:
審核編輯 :李倩
-
CAN
+關(guān)注
關(guān)注
57文章
2762瀏覽量
464016 -
網(wǎng)絡(luò)管理
+關(guān)注
關(guān)注
0文章
122瀏覽量
27703 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
363瀏覽量
21657
原文標題:AUTOSAR CAN網(wǎng)絡(luò)管理報文的數(shù)據(jù)場格式
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
AUTOSAR通信與CAN協(xié)議的關(guān)系
百問MQTT協(xié)議分析 - MQTT簡述及協(xié)議報文格式組成

【CAN總線知識】全面了解CAN總線協(xié)議

CAN總線的報文類型介紹
TSMaster 中不同總線報文消息過濾的操作方式

如何通過CAN報文TC375傳輸數(shù)據(jù)?
智慧CAN云應用(1)-平臺功能
CAN報文為什么會發(fā)送失敗?
CAN的報文格式和發(fā)送總流程
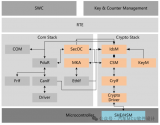
CP AUTOSAR信息安全機制全面解析
TC275多路CAN節(jié)點,報文接收時需要開啟多路的CAN接收中斷嗎?
請問用CAN存儲器存儲的CAN總線數(shù)據(jù)幀格式有哪些呢?
CAN總線報文數(shù)據(jù)一致性校驗





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論