") 三菱運動控制指令PLSY、PLSR、PLSV的使用說明
三菱運動控制指令PLSY、PLSR、PLSV的使用說明
前面我們講述了三菱運動控制指令PLSY、PLSR、PLSV的使用說明,其實在實際中最實用的還是DRVI和DRVA指令,新手在剛接觸這兩個指令時很容易混淆,不知道他們的區(qū)別是什么,今天就來說說。
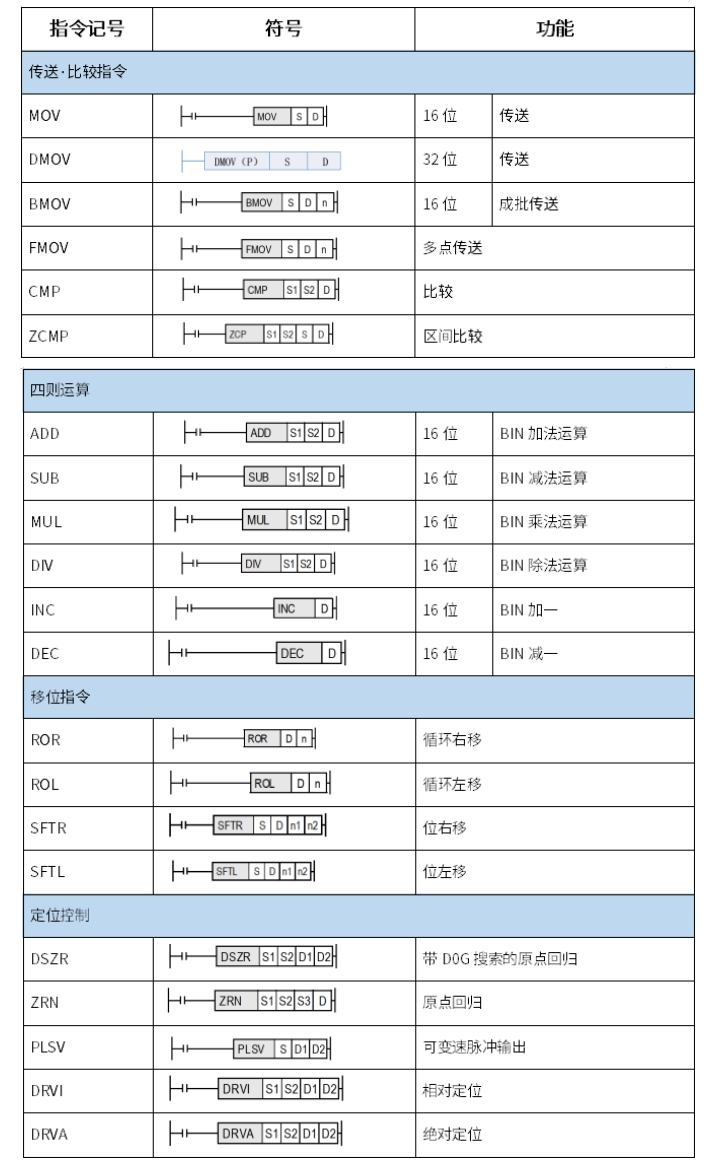
在三菱plc定位功能中,采用目標位置設(shè)定方式不同的相對定位(DRVI)指令和絕對定位(DRVA)指令, 進行單速定位。相對定位(DRVI)的目標位置設(shè)定方式采用相對地址的位置即增量式,絕對定位(DRVA)的目標位置設(shè)定方式采用絕對地址的位置即絕對量式。(聽起來很繞口)
首先我們需要了解的是增量式和絕對量。。
所謂的增量式就是以當前停止的位置作為起點,指定移動方向和移動量進行定位,簡單來說就是以我現(xiàn)在停的地方作為起點你指定我向哪個方向走多少我就走多少,比如輸入500,就向前走500,輸入-1000,就往后退1000。
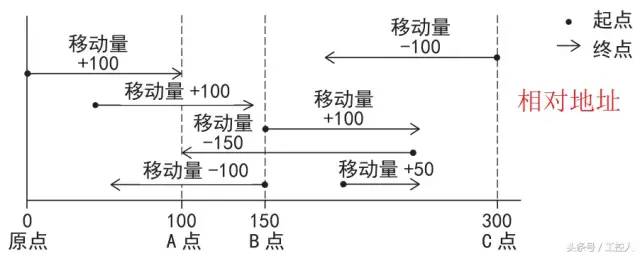
增量方式
所謂的絕對方式就是以原點為基準指定位置(絕對地址)進行定位,起點在哪里都沒有關(guān)系,就是說與現(xiàn)在我停在哪地方無關(guān),只與原點做比較,比如我現(xiàn)在在100的位置,我們輸入100,是不會動的,輸入500,會向前走400,輸入-500,會向后退600,因為只和原點做比較,現(xiàn)在在100的位置,輸入100與原點比較無變化,輸入500,源原點做比較還差400,所以往前走400,輸入-500,與原點比較,發(fā)現(xiàn)不僅要走100回到原點還要往回再走500加起來就是600。
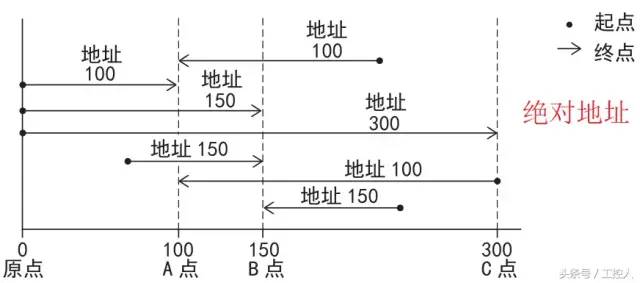
絕對方式
現(xiàn)在明白它們的區(qū)別了嗎,相對位置是多少就走多少,絕對位置是一個位置數(shù)據(jù),它走多少和走的方向要計算現(xiàn)在的位置與絕對位置之間的距離差。通俗的將就是,一個指定距離,一個指定目的。兩個指令都帶有加減速時間、基底、最高速度設(shè)置,而且都有脈沖發(fā)送完成標志位M8029,其他的相關(guān)軟元件與PLSV類似。
這里主要強調(diào)下旋轉(zhuǎn)方向的變換,對于DRVI,當脈沖輸出值(相對地址)為正數(shù)時正轉(zhuǎn),脈沖寄存器的脈沖當前值增加,當脈沖輸出值為負時反轉(zhuǎn),脈沖寄存器的脈沖當前值減少,比如設(shè)置脈沖輸出數(shù)為10000,則電機正轉(zhuǎn),脈沖輸出數(shù)為-5000時反轉(zhuǎn)。
對于DRVA,它的正反轉(zhuǎn)需要由脈沖輸出值(絕對地址)與當前寄存器中的大小做比較,比如當前寄存器為1000,我們設(shè)置脈沖輸出數(shù)為4000,則電機正轉(zhuǎn),如果設(shè)置脈沖輸出數(shù)為500,則電機反轉(zhuǎn)。
審核編輯:郭婷
-
三菱
+關(guān)注
關(guān)注
32文章
804瀏覽量
42871 -
控制指令
+關(guān)注
關(guān)注
0文章
14瀏覽量
5396
原文標題:伺服電機的單速定位,DRVI與DRVA的區(qū)別,很好用的運動控制指令
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
三菱PLC常用指令說明
三菱PLC伺服控制系統(tǒng)介紹
三菱伺服用什么總線控制
三菱plc累加指令怎么用
三菱plc trd指令詳解介紹
三菱plc常用的編程指令有哪些
三菱PLC指令ZRST和RST的區(qū)別
三菱plc常用指令使用詳解
三菱plc常開指令是什么
三菱PLCfx3U主控指令使用
三菱plc編程指令大全講解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論