上一期我們分享了基于HPM6750的HMI+四軸伺服電機運動控制方案,這期我們分享一個基于HPM6750的三軸伺服運動控制方案。三軸伺服方案適用于諸多場景,如枕式包裝機、三軸機械手系統(tǒng)等應(yīng)用。
本方案中,X軸、Y軸、Z軸協(xié)同工作,在伺服控制中接入插補算法,完成世界地圖繪制,如下視頻為三軸伺服運動控制下繪制世界地圖的過程,1分鐘不到繪制一個基本的世界地圖。
HPM6750芯片資源介紹
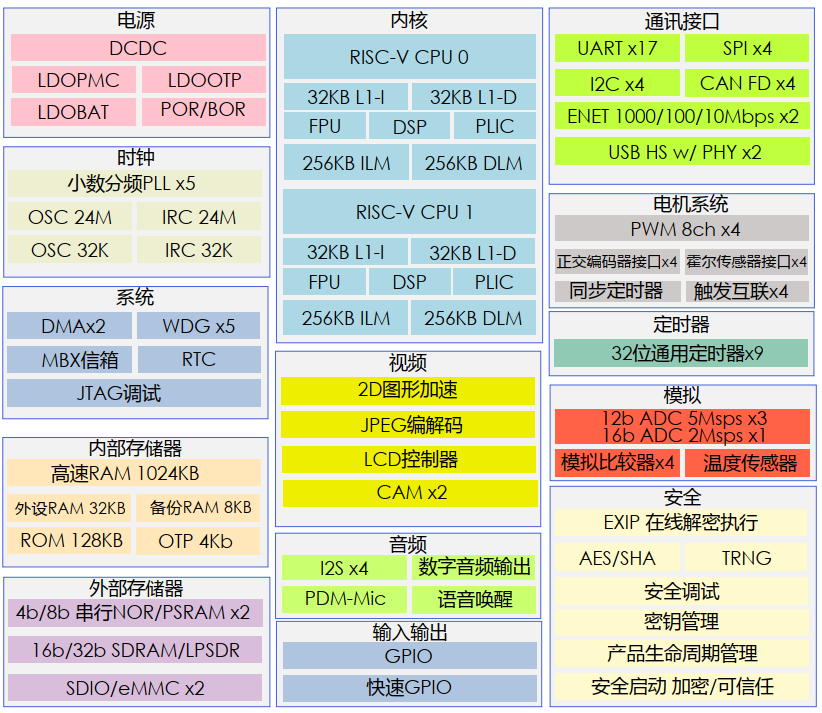
HPM6750采用雙RISC-V內(nèi)核,主頻達816MHz,憑借先楫半導(dǎo)體的創(chuàng)新總線架構(gòu)、高效的L1緩存和本地存儲器,創(chuàng)下了MCU高于 9000 CoreMark和 4500以上的DMIPS性能新記錄,創(chuàng)造了RISC-V 全球主頻和跑分新紀(jì)錄。除了高算力RISC-V CPU,HPM6700系列產(chǎn)品還創(chuàng)造性地整合了一系列高性能外設(shè),包括支持2D圖形加速的顯示系統(tǒng)、高速USB、千兆以太網(wǎng)、CAN FD等通訊接口,高速12位和高精度16位模數(shù)轉(zhuǎn)換器,面向高性能電機控制和數(shù)字電源的運動控制系統(tǒng)。
HPM6750電機控制單元介紹
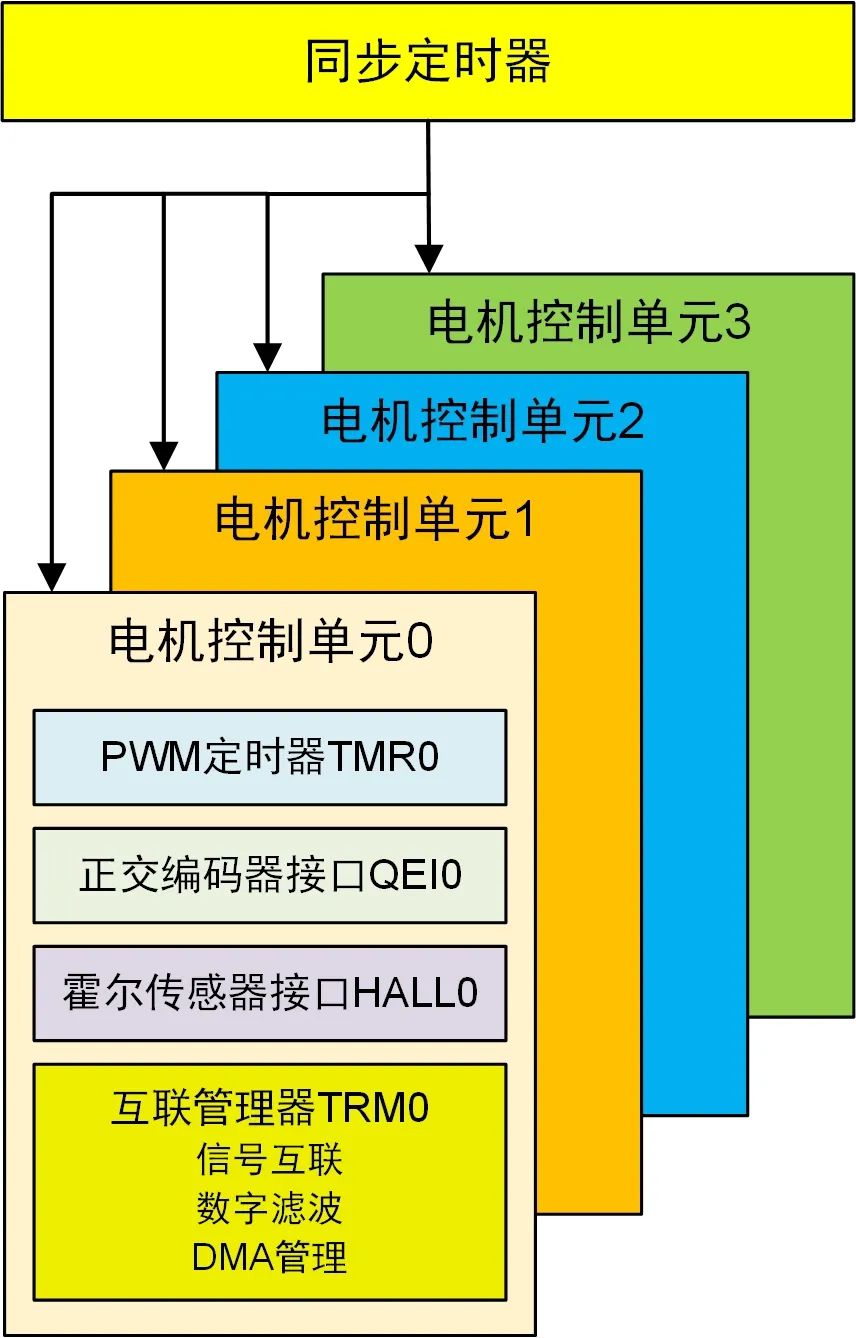
HPM6750系列支持4套電機控制單元,每個單元包括1個PWM定時器,一個正交編碼器接口,一個霍爾傳感器接口和1個互聯(lián)管理接口,配合片上提供的模數(shù)轉(zhuǎn)換ADC模塊和ACMP等外設(shè),可以實現(xiàn)同時控制4個電機;包含1個同步定時器,可以用于4套電機控制單元間進行同步。
1.PWM定時器
支持4個PWM定時器,單個PWM支持高達28位計數(shù),支持24個通道;
2.同步定時器
當(dāng)計數(shù)器計數(shù)達到比較值會輸出一個比較事件,可以連接到其他定時器用作同步;
3.正交編碼器接口QEI
支持4個正交編碼器接口QEI,用以測量感應(yīng)電機位置信息;
4.霍爾傳感器接口HALL
支持4個霍爾傳感器接口HALL;
5.互聯(lián)管理TRGM
支持多個外設(shè)的輸入輸出信號可以相互連接,使得多個外設(shè)可以相互配合使用;
支持?jǐn)?shù)字濾波,互聯(lián)管理器支持管理外設(shè)DMA請求;
6.模擬外設(shè)
支持3個12位ADC,支持20個輸入通道,支持單端和差分輸入,高達5M采樣率;
支持1個16為ADC,支持8個輸入通道,高達2M采樣率。
審核編輯:郭婷
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
原文標(biāo)題:三軸伺服運動控制,1分鐘繪制世界地圖
文章出處:【微信號:立功科技,微信公眾號:立功科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
相關(guān)推薦
邏輯控制器(PLC)和伺服電機驅(qū)動技術(shù)的自動化解決方案。它通過精確控制電機的速度、位置和加速度,實現(xiàn)機器設(shè)備的精確運動。這種系統(tǒng)廣泛應(yīng)用于包
![的頭像]() 發(fā)表于
發(fā)表于 12-26 17:32
?266次閱讀
了系統(tǒng)的維護成本,實現(xiàn)智能化生產(chǎn),是現(xiàn)代工業(yè)自動化系統(tǒng)中不可或缺的關(guān)鍵組成部分。 國產(chǎn)高性能微控制器產(chǎn)品及解決方案服務(wù)商——上海先楫半導(dǎo)體科技有限公司(先楫半導(dǎo)體,HPMicro)研制的HPM6E00
發(fā)表于 11-05 13:54
?424次閱讀
我正在做一個hpm6750evk2的bootloader。設(shè)計很簡單,boot工程代碼只做跳轉(zhuǎn)到1M后的APP工程代碼處,APP工程就是做的一個點燈的程序而已,boot、APP工程都是跑
發(fā)表于 10-23 19:01
我正在做一個hpm6750evk2的bootloader。設(shè)計很簡單,boot工程代碼只做跳轉(zhuǎn)到1M后的APP工程代碼處,APP工程就是做的一個點燈的程序而已,boot、APP工程都是跑
發(fā)表于 10-23 18:59
電子發(fā)燒友網(wǎng)站提供《多軸伺服控制的FSI帶寬優(yōu)化應(yīng)用說明.pdf》資料免費下載
發(fā)表于 09-10 10:37
?0次下載

_manufacturing_tool_gui linux 版本 選擇 hidraw 連接 HPM6750 芯片,能識別到 hidraw 設(shè)備,單擊連接是提示重啟芯片這個時候會等待超時然后軟件報錯,此時查看 lsusb 設(shè)備是檢測不到 hpm6750
發(fā)表于 08-07 16:43
技術(shù)針對現(xiàn)有市場需求,開發(fā)了一種基于VPLC系列機器視覺運動控制一體機的五軸聯(lián)動點膠解決方案,適用于各種復(fù)雜型面工件的高精度點膠和各種膠水。
方案
發(fā)表于 07-29 14:29
了運動控制和機器視覺系統(tǒng)的結(jié)合,并降低了它們的開發(fā)難度和開發(fā)成本。在設(shè)計這種系統(tǒng)時,了解目前的技術(shù)發(fā)展、方法以及開發(fā)工具會對您的工作提供很大的幫助。 ? ? ??機器視覺控制軸
![的頭像]() 發(fā)表于
發(fā)表于 07-09 08:45
?287次閱讀
機器視覺控制軸運動原理是一個復(fù)雜而深入的主題。下面將從以下幾個方面進行介紹: 機器視覺概述 機器視覺是一種模擬人類視覺的計算機技術(shù),通過圖像采集、處理和分析來實現(xiàn)對物體的識別、定位、測量和分類等功能
![的頭像]() 發(fā)表于
發(fā)表于 07-04 10:42
?548次閱讀
運動控制卡伺服電機控制是現(xiàn)代工業(yè)自動化領(lǐng)域中一項重要的技術(shù),它涉及到運動控制卡、
![的頭像]() 發(fā)表于
發(fā)表于 06-12 14:13
?901次閱讀
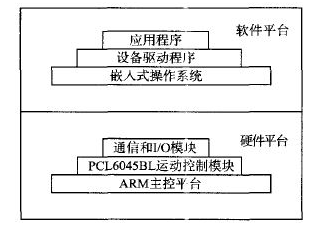
PCL6045BL是一種新型專用DSP運動控制芯片,它具有強大的數(shù)據(jù)處理能力和較高的運行速度,可以實現(xiàn)高精度的多軸伺服控制。為解決精密制造
發(fā)表于 05-03 10:44
?554次閱讀
驅(qū)動器,控制XYR軸運動;
●EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機和線掃相機,實現(xiàn)視覺定位、旋轉(zhuǎn)中心點確定、軌跡糾偏、曲面連續(xù)采圖等應(yīng)用。
解決方案硬件配置
發(fā)表于 04-16 17:58
1、新建RTT工程,工程中添加對ADC的驅(qū)動:
2、保存工程后,添加測試代碼。
3、我們根據(jù)原理圖上的J10接個,只有PE29是ADC3的輸出通道
4、先定義通道、任務(wù)
#define ADC_DEV_NAME\"adc3\"/* ADC 設(shè)備名稱 */
#define ADC_DEV_CHANNEL2/* ADC 通道 */
#define REFER_VOLTAGE 330/* 參考電壓 3.3V,數(shù)據(jù)精度乘以100保留2位小數(shù)*/
#define CONVERT_BITS(1 << 16)/* 轉(zhuǎn)換位數(shù)為16位 */
5、添加任務(wù):
static void Adc_entry(void* paremeter)
{
rt_adc_device_t adc_dev;
rt_uint32_t value,vol;
rt_err_t ret = RT_EOK;
adc_dev = (rt_adc_device_t)rt_device_find(ADC_DEV_NAME);
if (adc_dev == RT_NULL)
{
rt_kprintf(\"adc sample run failed! can\'t find %s device!\\\\n\", ADC_DEV_NAME);
}
/* 使能設(shè)備 */
ret = rt_adc_enable(adc_dev, ADC_DEV_CHANNEL);
if(ret == RT_EOK)
{
rt_kprintf(\"adc sample run success!find %s device!\\\\n\", ADC_DEV_NAME);
}
while(1)
{
/* 讀取采樣值 */
value = rt_adc_read(adc_dev, ADC_DEV_CHANNEL);
rt_kprintf(\"the value is :%d \\\\n\", value);
/* 轉(zhuǎn)換為對應(yīng)電壓值 */
vol = value * REFER_VOLTAGE / CONVERT_BITS;
rt_kprintf(\"the voltage is :%d.%02d \\\\n\", vol / 100, vol % 100);
rt_thread_delay(500);
}
}
7、在主函數(shù)里啟用任務(wù)
Adc_thread = rt_thread_create(\"adc1\",
Adc_entry,
RT_NULL,
512,
16,
20);
if(Adc_thread != RT_NULL)
rt_thread_startup(Adc_thread);
else
return -1;
發(fā)表于 02-17 16:00
拿到HPM6750EVK2,使用jlink下載時,我原來用買jlink配的20轉(zhuǎn)10轉(zhuǎn)接板進行連接,下載程序里一直報不能連接到開發(fā)板。經(jīng)過查找用手冊后,找到了問題。
我的jlink的引腳圖與之不對
發(fā)表于 02-16 10:30
最近入手先輯的HPM6750,需要使用Embedded Studio 編譯器來做開發(fā),各位推薦一下學(xué)習(xí)資料。
發(fā)表于 02-04 08:01
") 基于HPM6750的三軸伺服運動控制方案
基于HPM6750的三軸伺服運動控制方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論