") 純電動(dòng)汽車(chē)的典型整車(chē)控制系統(tǒng)及芯片方案解析
純電動(dòng)汽車(chē)的典型整車(chē)控制系統(tǒng)及芯片方案解析
1.背景
動(dòng)力總成(Powertrain)系統(tǒng)是車(chē)輛的重要組成部分,它負(fù)責(zé)從車(chē)輛的儲(chǔ)能單元進(jìn)行能量轉(zhuǎn)換,也即生成動(dòng)力,然后將動(dòng)力傳送給車(chē)輛的驅(qū)動(dòng)系統(tǒng),從而驅(qū)動(dòng)車(chē)輛行駛前進(jìn)。
盡管傳統(tǒng)燃油的內(nèi)燃機(jī)車(chē)(ICEV)與電動(dòng)汽車(chē)(Electric Vehicle)有著完全的不同的動(dòng)力總成設(shè)計(jì)和部件,但從Powertrain架構(gòu)上來(lái)看依然可以分為“儲(chǔ)能系統(tǒng)”和“驅(qū)動(dòng)系統(tǒng)”兩大主要部分。EV使用動(dòng)力電池取代了油箱來(lái)儲(chǔ)能,相應(yīng)地也增加了“電池管理系統(tǒng)(Battery Management System, BMS)”。同時(shí)EV采用了“電機(jī)(Motor)”取代內(nèi)燃機(jī)引擎(Engine)來(lái)驅(qū)動(dòng)車(chē)輛,因此“電機(jī)控制器(Inverter)”代替了“發(fā)動(dòng)機(jī)控制器(Engine Control Unit,ECU)”。
對(duì)于ICEV車(chē)輛來(lái)說(shuō),從駕駛意圖的獲取到能源供給,再到能量的轉(zhuǎn)化,幾乎都是由發(fā)動(dòng)機(jī)控制器ECU來(lái)完成的。而對(duì)于EV來(lái)說(shuō),類(lèi)似的功能則由“整車(chē)控制單元VCU(Vehicle Control Unit,也稱為電控單元)”來(lái)完成。VCU可以被視作電車(chē)的動(dòng)力總成系統(tǒng)的主控單元,負(fù)責(zé)根據(jù)駕駛員意圖、車(chē)輛運(yùn)行狀態(tài)以及整車(chē)控制策略,經(jīng)過(guò)計(jì)算分析然后給各部件發(fā)出相應(yīng)的控制命令,以實(shí)現(xiàn)電車(chē)的高性能安全行駛。因此也有人把VCU比喻成EV的“小腦”。
電機(jī)、電池和電控(也就是俗稱的“三電”系統(tǒng))構(gòu)成了電動(dòng)汽車(chē)的整車(chē)控制系統(tǒng)。狹義上的電控就是指整車(chē)控制器VCU,但是廣義上的電控系統(tǒng)往往指由電機(jī)、電池和VCU組成的整車(chē)控制系統(tǒng)。
2.整車(chē)控制系統(tǒng)
整車(chē)控制系統(tǒng)按照?qǐng)?zhí)行任務(wù)的層級(jí)可以分為“決策層”、“協(xié)調(diào)層”和“執(zhí)行層”等,這三個(gè)層級(jí)構(gòu)成了一個(gè)閉環(huán)控制系統(tǒng)。決策層由駕駛員構(gòu)成;整車(chē)控制器VCU作為協(xié)調(diào)層根據(jù)車(chē)輛實(shí)時(shí)狀態(tài)和決策層的指令對(duì)駕駛員的操作目的做出合理判斷;整車(chē)控制器VCU將控制指令發(fā)送給執(zhí)行層,由執(zhí)行層執(zhí)行相應(yīng)控制命令。
下圖4-1是一個(gè)純電動(dòng)汽車(chē)的典型整車(chē)控制系統(tǒng)的結(jié)構(gòu)圖。
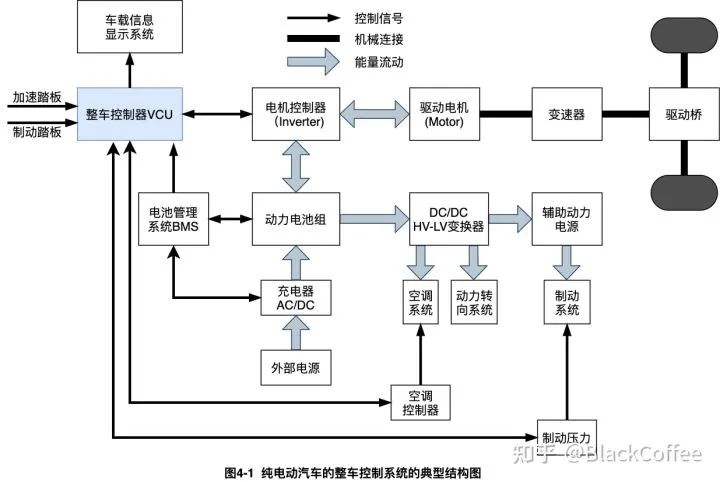
如上圖所示,整車(chē)控制系統(tǒng)以電控VCU為核心,通過(guò)CAN總線指揮儲(chǔ)能系統(tǒng)、電機(jī)系統(tǒng)等關(guān)鍵的總成部件執(zhí)行相應(yīng)的上下電動(dòng)作以及扭矩指令,最終完成整車(chē)的行駛運(yùn)行。
整個(gè)控制系統(tǒng)也分為低壓部分和高壓部分,并由HV-LV DC/DC變換器完成高壓到低壓的轉(zhuǎn)換。低壓部分完成車(chē)輛控制器供電和信號(hào)采集通訊任務(wù);高壓部分通過(guò)高壓線束將動(dòng)力電池的電能傳輸?shù)娇照{(diào)系統(tǒng)、電機(jī)等高壓供電設(shè)備,實(shí)現(xiàn)動(dòng)力電能的傳輸。
逆變器(Inverter,也即電機(jī)控制器),是純電汽車(chē)動(dòng)力性能的決定性部件之一。它從整車(chē)控制器獲得整車(chē)的扭矩需求,從動(dòng)力電池包獲得電能,經(jīng)過(guò)自身逆變器的調(diào)制,獲得控制電機(jī)所需要的電流和電壓,提供給電機(jī),使得電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩滿足滿足整車(chē)行駛的需求。
2.1整車(chē)控制器VCU
VCU是電動(dòng)汽車(chē)的核心部件,車(chē)輛的駕駛平順性、能耗經(jīng)濟(jì)性以及運(yùn)行可靠性等都與VCU息息相關(guān)。下圖4-2是從VCU視角抽象的電控系統(tǒng)主要功能示意圖,它獲取駕駛意圖和車(chē)輛運(yùn)行狀態(tài)作為輸入信息,匹配駕駛需求,制定合理的功率輸出和能量回收策略,并通過(guò)CAN總線或LIN總線將控制命令輸出給其余Powertrain控制器。
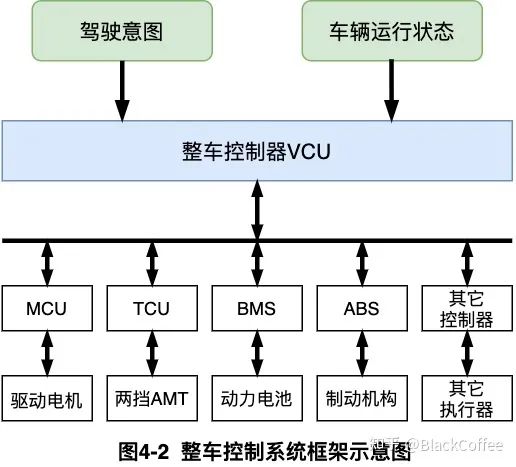
注:上圖中的MCU代表的是Motor Control Unit,指包括逆變器在內(nèi)的電機(jī)控制器單元。TCU代表Transmission Control Unit,指變速器控制單元。
具體而言,VCU通常需要實(shí)現(xiàn)以下6個(gè)方面的功能:
(1)獲取駕駛意圖和車(chē)輛運(yùn)行狀態(tài):VCU必須能夠采集“油門(mén)踏板信號(hào)”、“剎車(chē)踏板信號(hào)”、“檔位手柄位置信號(hào)”等模擬量信號(hào)來(lái)判斷駕駛員或者ADAS系統(tǒng)的駕駛意圖。另外還需要采集“車(chē)速信號(hào)”、“電機(jī)轉(zhuǎn)速”等頻率信號(hào),以及通過(guò)CAN總線采集的其它控制器信號(hào),比如:電機(jī)輸出扭矩、變速箱檔位、電池荷電狀態(tài)(SOC)等,通過(guò)計(jì)算和分析得出車(chē)輛運(yùn)行狀態(tài)信息。
(2)Powertrain控制:VCU最重要的功能就是根據(jù)駕駛員的駕駛意圖和車(chē)輛實(shí)時(shí)狀態(tài),按照設(shè)定的控制程序向相應(yīng)的powertrain子系統(tǒng)發(fā)送控制信號(hào),從而控制整車(chē)行駛。比如:當(dāng)駕駛員踩下加速踏板時(shí),VCU向電機(jī)控制單元發(fā)送電機(jī)輸出轉(zhuǎn)矩信號(hào),電機(jī)控制系統(tǒng)控制電機(jī)按照駕駛員的意圖輸出扭矩(Torque)。
VCU對(duì)扭矩的動(dòng)態(tài)控制是影響整車(chē)行駛舒適性的關(guān)鍵因素。主要包括模式切換過(guò)程中的扭矩協(xié)調(diào),以及換擋過(guò)程中VCU與自動(dòng)變速器控制系統(tǒng)(Transmission Control Unit,TCU)之間的協(xié)調(diào)控制。模式切換過(guò)程與換擋過(guò)程均為高度瞬態(tài)過(guò)程,可能引起電機(jī)目標(biāo)扭矩的突變,引起動(dòng)力系統(tǒng)輸出的動(dòng)力不平穩(wěn)。
(3)能量管理策略:VCU采用良好的能量管理策略,提高電池的能量使用效率,對(duì)于提升電動(dòng)汽車(chē)的續(xù)航里程是至關(guān)重要的。能量管理策略包括整車(chē)控制、整車(chē)能量分配、制動(dòng)能量回收等方面。
整車(chē)控制相關(guān)的能量管理策略是指日和合理地分配電機(jī)的輸出扭矩,在滿足駕駛員的需求扭矩和整車(chē)動(dòng)力性的前提下,維持電機(jī)和電池組的效率在一個(gè)良好的范圍內(nèi),從而達(dá)到高效、節(jié)能的目的。
整車(chē)能量分配是指對(duì)整車(chē)各部件使用能量進(jìn)行優(yōu)化。純電動(dòng)汽車(chē)有很多用電設(shè)備,包括電機(jī)和空調(diào)設(shè)備等。整車(chē)控制器可以對(duì)能量進(jìn)行合理分配優(yōu)化,來(lái)提高純電動(dòng)汽車(chē)的續(xù)駛里程。例如當(dāng)動(dòng)力電池組電量較低時(shí),整車(chē)控制器發(fā)送控制指令關(guān)閉部分起輔助作用的電氣設(shè)備,將電能優(yōu)先保證車(chē)輛的安全行駛。
制動(dòng)能量回收控制:純電動(dòng)汽車(chē)的電機(jī)可以工作在再生制動(dòng)狀態(tài),對(duì)制動(dòng)能量進(jìn)行回收利用是純電動(dòng)汽車(chē)和傳統(tǒng)能源汽車(chē)的重要區(qū)別。VCU根據(jù)行駛速度、駕駛員制動(dòng)意圖和電池組狀態(tài)進(jìn)行綜合判斷后,對(duì)制動(dòng)能量回饋進(jìn)行控制。如果達(dá)到回收制動(dòng)能量的條件,整車(chē)控制器向電機(jī)控制單元發(fā)送控制指令,使電機(jī)工作在發(fā)電狀態(tài),將部分制動(dòng)能量?jī)?chǔ)存在動(dòng)力電池組中,提高車(chē)輛能量利用效率。
(4)整車(chē)通訊網(wǎng)絡(luò)管理:整車(chē)控制器作為整車(chē)控制系統(tǒng)的通訊中心節(jié)點(diǎn),負(fù)責(zé)信息的組織、信息優(yōu)先權(quán)的動(dòng)態(tài)分配和傳輸、網(wǎng)絡(luò)狀態(tài)的監(jiān)管及故斷與處理。
(5)車(chē)輛狀態(tài)檢測(cè)與顯示:VCU需要實(shí)時(shí)監(jiān)測(cè)車(chē)輛的各種運(yùn)行狀態(tài)信息,比如:通過(guò) CAN 總線通信獲得車(chē)速、電池剩余電量、電機(jī)轉(zhuǎn)速、電流等關(guān)鍵的車(chē)輛運(yùn)行數(shù)據(jù),并將它們發(fā)送給儀表盤(pán)顯示系統(tǒng),便于駕駛員準(zhǔn)確掌握車(chē)輛整體運(yùn)行狀況完成相應(yīng)操作。
(6)故障檢測(cè)與診斷:正常情況下,VCU對(duì)整車(chē)運(yùn)行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)控。但是當(dāng)發(fā)生故障時(shí),必須及時(shí)報(bào)警,產(chǎn)生、存儲(chǔ)和發(fā)送相應(yīng)的故障碼,根據(jù)故障等級(jí)的不同迅速采取相應(yīng)的安全處理措施,確保車(chē)輛安全行駛。除了故障檢測(cè)之外,VCU也需要實(shí)現(xiàn)故障狀態(tài)下的保護(hù)功能,也就是按照出現(xiàn)的故障類(lèi)別對(duì)整車(chē)進(jìn)行保護(hù),緊急狀態(tài)下才去必要的措施進(jìn)行安全保護(hù),以防止極端情況的發(fā)生。
2.1.1 VCU的硬件組成
VCU硬件由主控芯片以及周邊的時(shí)鐘電路、復(fù)位電路、預(yù)留接口電路和電源模塊等組成最小系統(tǒng)。在最小系統(tǒng)以外,一般還配備數(shù)字信號(hào)處理電路,模擬信號(hào)處理電路,頻率信號(hào)處理電路,通訊接口電路(包括CAN通訊接口和RS232通訊接口)。如下圖4-3所示:
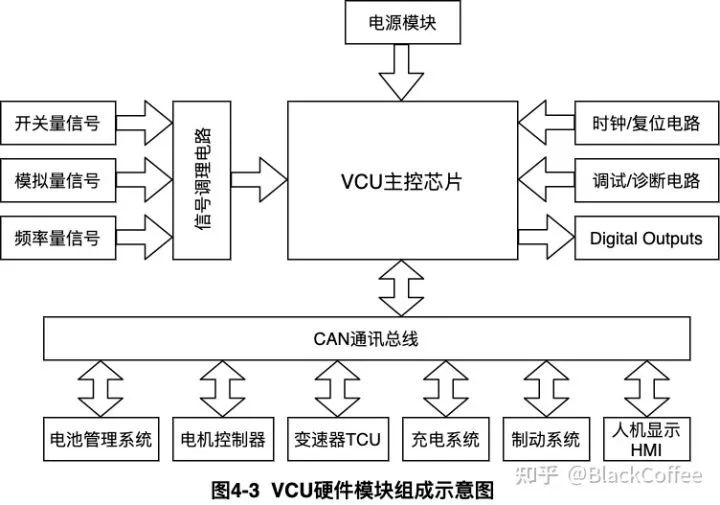
開(kāi)關(guān)信號(hào)包括:鑰匙信號(hào)、檔位信號(hào)、充電開(kāi)關(guān)、制動(dòng)信號(hào)等;
模擬信號(hào)包括:加速踏板信號(hào)、制動(dòng)踏板信號(hào)、電池電壓信號(hào)等;
頻率信號(hào)包括:比如車(chē)速傳感器的電磁信號(hào),等等。
輸出信號(hào)一般用于控制接觸器等部件。
2.1.2 VCU的車(chē)輛驅(qū)動(dòng)控制策略
驅(qū)動(dòng)控制策略簡(jiǎn)而言之就是在特定的模式下采用最佳的特定轉(zhuǎn)矩進(jìn)行合理配置,從而最大限度地省電能,發(fā)揮出電動(dòng)汽車(chē)的經(jīng)濟(jì)用性。這是整車(chē)控制策略的核心重點(diǎn)。
驅(qū)動(dòng)控制策略將汽車(chē)運(yùn)行模式分為以下幾種,按照不同的運(yùn)行模式采取不同的驅(qū)動(dòng)控制策略:
1.起步模式:整車(chē)控制器在完成對(duì)電動(dòng)汽車(chē)的上電自檢后,如果采集到駕駛員加速踏板信號(hào),開(kāi)始計(jì)算電機(jī)轉(zhuǎn)矩,發(fā)送扭矩需求給電機(jī)控制單元。然后電機(jī)控制單元控制電機(jī)啟動(dòng)使電動(dòng)汽車(chē)平穩(wěn)起步。如果檢測(cè)到動(dòng)力電池組電量低于安全值,發(fā)送報(bào)警信號(hào)提醒駕駛員采取相應(yīng)措施。
2.正常驅(qū)動(dòng)模式:指車(chē)輛處于正常運(yùn)行狀態(tài),包括加速和倒車(chē)等模式。在這個(gè)模式下,VCU持續(xù)監(jiān)測(cè)哥哥電氣系統(tǒng)的狀態(tài)參數(shù)(比如:電流、電壓和溫度等),以及車(chē)輛自身的行車(chē)狀態(tài)參數(shù)(比如:車(chē)速、滑移率等),識(shí)別駕駛員意圖,按照加速踏板的開(kāi)度和開(kāi)度變化率等,計(jì)算所需要的電機(jī)驅(qū)動(dòng)扭矩和動(dòng)力電池的輸出功率等。最后,將這些輸出發(fā)送給電機(jī)控制器單元等。當(dāng)駕駛員掛入倒檔時(shí),倒檔信號(hào)傳入VCU,車(chē)輛進(jìn)入倒檔模式,此時(shí)需要VCU輸出一個(gè)扭矩來(lái)平穩(wěn)倒車(chē)。
3.制動(dòng)模式:當(dāng)制動(dòng)踏板被踩下后,進(jìn)入制動(dòng)模式。VCU分析制動(dòng)踏板的開(kāi)度和開(kāi)度變化率,以及車(chē)速和車(chē)輛自身的車(chē)型參數(shù),來(lái)推算所需的制動(dòng)力矩,然后指揮制動(dòng)控制器,做出最合理的制動(dòng)力矩分配方案,以及是否優(yōu)先啟動(dòng)ABS主導(dǎo)制動(dòng)過(guò)程等。最終安全有效地實(shí)現(xiàn)駕駛員的制動(dòng)意圖。純電動(dòng)汽車(chē)區(qū)別于傳統(tǒng)內(nèi)燃機(jī)動(dòng)力汽車(chē)的主要特點(diǎn)是可以對(duì)制動(dòng)能量進(jìn)行回收,即在制動(dòng)過(guò)程中采用合理的制動(dòng)能量回饋控制策略使電機(jī)工作在發(fā)電狀態(tài),對(duì)部分制動(dòng)能量進(jìn)行回收利用,提高車(chē)載能量利用效率。
4.安全保護(hù)模式:保護(hù)模式非常重要,VCU需要確保電動(dòng)汽車(chē)在驅(qū)動(dòng)系統(tǒng)出現(xiàn)不同級(jí)別故障時(shí)采取不同的安全措施,以保證行駛安全。電動(dòng)汽車(chē)在行駛過(guò)程中可能出現(xiàn)的故障按照嚴(yán)重程度被分成幾個(gè)等級(jí):1)故障等級(jí)低的,通常給駕駛員提示告警;2)故障等級(jí)高的,會(huì)強(qiáng)制車(chē)輛段時(shí)間內(nèi)停車(chē);比如:系統(tǒng)絕緣故障。3)中間等級(jí)的故障,通常會(huì)對(duì)車(chē)輛運(yùn)行狀態(tài)進(jìn)行限制,但不會(huì)強(qiáng)制停車(chē)。比如:電池電量SOC低于30%,限速行駛。此時(shí)的動(dòng)力電池系統(tǒng),已經(jīng)無(wú)法輸出額定功率,而只能以一個(gè)較小的功率工作。
5.充電模式:當(dāng)VCU監(jiān)測(cè)到充電槍與車(chē)輛充電插座物理連接確認(rèn)后,輔助電源上電,相互發(fā)送握手報(bào)文并完成絕緣檢測(cè)。外部充電機(jī)與BMS進(jìn)行參數(shù)協(xié)商確認(rèn)。充電機(jī)發(fā)送充電機(jī)最大輸出能力報(bào)文給BMS,以確認(rèn)是否可以以最大能力充電,若不可,則BMS發(fā)送電池包的最大接受能力。進(jìn)入正式充電模式后,在此過(guò)程中,充電機(jī)和BMS實(shí)時(shí)互相發(fā)送狀態(tài)信息,BMS周期性發(fā)送需求參數(shù)。
充電結(jié)束,其判別條件根據(jù)BMS的不同設(shè)置而有所不同,一般做法,充電最后恒壓階段,電流衰減到一個(gè)設(shè)定值或者設(shè)定的倍率,即認(rèn)為電池包已經(jīng)充滿,充電過(guò)程可以結(jié)束。充電過(guò)程中,任何一方發(fā)生故障,比如過(guò)溫、過(guò)流等,充電機(jī)都會(huì)發(fā)出報(bào)警,根據(jù)故障等級(jí)的不同,有的直接終止,有的等待人為處理。
2.2電池管理系統(tǒng)BMS
動(dòng)力電池包是電動(dòng)汽車(chē)唯一的動(dòng)力來(lái)源。對(duì)電池組進(jìn)行有效管理是電動(dòng)汽車(chē)整車(chē)能量管理的核心。電池管理系統(tǒng)(BMS)是整車(chē)控制系統(tǒng)中負(fù)責(zé)進(jìn)行電池管理的控制單元,因此也是整車(chē)能量管理系統(tǒng)的重要組成部分。VCU通過(guò)CAN總線與BMS進(jìn)行通訊,實(shí)施對(duì)動(dòng)力電池組的有效控制;另一方面也通過(guò)CAN總線從BMS中獲取動(dòng)力電池組的當(dāng)前狀態(tài)信息,為整車(chē)的能量控制策略提供基準(zhǔn)參考。
一個(gè)“動(dòng)力電池包(Battery PACK)”通常由幾個(gè)“電池模塊(Battery Module)”組成。電池模塊也簡(jiǎn)稱為“模組”,我們通常把多個(gè)“電芯(Battery Cell)”用同一個(gè)外殼框架封裝在一起,通過(guò)統(tǒng)一的邊界與外部進(jìn)行聯(lián)系時(shí),這就組成了一個(gè)模組。“電芯(Battery Cell)”是動(dòng)力電池的最小單位,也是電能存儲(chǔ)單元。如下圖4-4所示:

圖4-4 動(dòng)力電池的“電芯-模組-電池包”的組成關(guān)系
BMS系統(tǒng)通常由電池控制器單元(Battery Control Unit,BCU)和電池管理單元(Battery Management Unit,BMU)組成。電池模組中的BMU主要任務(wù)包括:負(fù)責(zé)采樣模組中的電芯的電壓,執(zhí)行電芯的電壓平衡,采樣和管理電芯的溫度,通過(guò)CAN總線跟外部其余相關(guān)單元進(jìn)行通訊等。而B(niǎo)CU的主要任務(wù)包括:測(cè)量電池包的總電壓、總電流和絕緣狀態(tài)等,管理充電和放電,評(píng)估電池荷電狀態(tài)SOC/SOH/SOP值,此外它也是VCU與電池包之間的通訊中介橋梁。如下圖4-5所示:
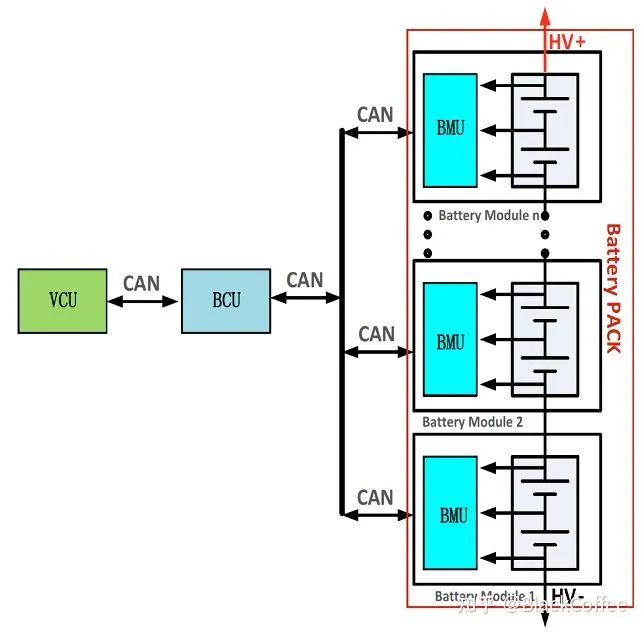
圖4-5 VCU與BMS系統(tǒng)
BMS需要實(shí)現(xiàn)的主要功能包括以下幾點(diǎn):
對(duì)電池信息進(jìn)行采集:準(zhǔn)確采集電池包的總電流、總電壓、最高單體電壓、最高溫度、電池包荷電狀態(tài)SOC(State Of Charge),以及電池包荷電健康狀態(tài)SOH(State Of Health)等參數(shù)數(shù)據(jù)。并將電池包的這些信息通過(guò)CAN總線通信網(wǎng)絡(luò)發(fā)送給整車(chē)控制器VCU。
進(jìn)行電池SOC估算。整車(chē)控制器VCU在進(jìn)行整車(chē)能量管理時(shí),必須考慮動(dòng)力電池包的狀態(tài)。電池剩余電量SOC是衡量電池狀態(tài)的重要指標(biāo),表示電池當(dāng)前剩余電量與額定電量的比值。如何根據(jù)電池的端電壓,充放電電流,內(nèi)阻等參數(shù)對(duì)電池剩余容量進(jìn)行估計(jì)是電池管理系統(tǒng)研究的關(guān)鍵問(wèn)題之一。
對(duì)電池包進(jìn)行充放電控制:對(duì)電池包進(jìn)行充放電控制對(duì)于保證電池包安全工作,防止電池過(guò)度充放電有著重要意義。整車(chē)控制器通過(guò)對(duì)電池管理系統(tǒng)的控制實(shí)現(xiàn)電池的充放電轉(zhuǎn)換。
對(duì)電池包進(jìn)行均衡控制:動(dòng)力電池包里不同電芯單體間的不一致性是固有的,為了延長(zhǎng)電池的使用壽命,電池管理系統(tǒng)需要提供均衡措施盡量減小單體電池之間的差異。對(duì)動(dòng)力電池包進(jìn)行均衡控制對(duì)提高電池使用壽命有著重要意義。
故障診斷及處理:動(dòng)力電池包的運(yùn)行環(huán)境非常惡劣復(fù)雜,一旦出現(xiàn)故障必然會(huì)導(dǎo)致電池性能的下降,情況嚴(yán)重會(huì)導(dǎo)致電池報(bào)廢甚至爆炸。因此,電池管理系統(tǒng)必須具備及時(shí)預(yù)防故障和及時(shí)處理故障的能力。動(dòng)力電池包可能出現(xiàn)的故障主要有:過(guò)充、過(guò)放、過(guò)溫、過(guò)流、容量過(guò)高、容量過(guò)低等。電池管理系統(tǒng)的故障診斷及處理是實(shí)現(xiàn)電池組安全工作的重要保障。
2.3電機(jī)控制器
電機(jī)控制器(Motor Control Unit,MCU)和驅(qū)動(dòng)電機(jī)共同組成了電機(jī)系統(tǒng)。電機(jī)控制器接收來(lái)整車(chē)控制器VCU的需求扭矩和目標(biāo)車(chē)速等信息,然后通過(guò)里面的單片機(jī)控制IGBT 模塊進(jìn)行動(dòng)態(tài)扭矩矢量控制,以控制電機(jī)將電池包的電能轉(zhuǎn)化成機(jī)械能。
電機(jī)控制器主要由中央控制模塊、功率模塊、驅(qū)動(dòng)控制模塊以及各種傳感器等組成。
中央控制模塊包括:PWM波生成電路、復(fù)位電路、傳感器信號(hào)處理電路、交互電路等。中央控制模塊的兩大功能:1)對(duì)外,通過(guò)IO接口獲取整車(chē)上其他部件的指令和狀態(tài)信息。對(duì)內(nèi),把翻譯過(guò)的指令傳遞給逆變器驅(qū)動(dòng)電路,并檢測(cè)控制效果。
功率模塊:電機(jī)控制器的主體是“逆變器(Inverter)”。逆變器對(duì)電機(jī)電流電壓進(jìn)行控制。經(jīng)常選用的功率器件主要有MOSFET或者IGBT等。
驅(qū)動(dòng)控制模塊:它的作用是將中央控制模塊的指令轉(zhuǎn)換成對(duì)逆變器中可控硅的通斷指令,并作為保護(hù)裝置,具備過(guò)壓、過(guò)流等故障的監(jiān)測(cè)保護(hù)功能。
傳感器:包括電流傳感器、電壓傳感器、溫度傳感器、電機(jī)轉(zhuǎn)軸角位置傳感器等。
3.整車(chē)控制域的芯片方案
整車(chē)控制域的芯片主要是以各種MCU芯片為主,強(qiáng)調(diào)低功耗設(shè)計(jì)、控制實(shí)時(shí)性以及ASIL-D等級(jí)的功能安全等特性,軟件上則主要以AutoSAR CP平臺(tái)為主。傳統(tǒng)汽車(chē)電子廠商(包括瑞薩、TI、NXP和Infineon等)都有豐富的針對(duì)整車(chē)控制器的MCU芯片方案。這里介紹一下NXP的S32系列MCU芯片。
3.1 S32K3系列MCU芯片
NXP S32K3是基于ARM Cortex-M7內(nèi)核所打造的、可支持ASIL-D級(jí)別功能安全的系列家族MCU芯片產(chǎn)品。它的設(shè)計(jì)應(yīng)用場(chǎng)景包括:電機(jī)控制器、車(chē)身控制器、BMS等整車(chē)控制域中各種控制器單元。S32K3強(qiáng)調(diào)芯片架構(gòu)的伸縮性,支持單核、雙核和鎖步(Lockstep)核等不同內(nèi)核配置,以靈活適應(yīng)各種不同場(chǎng)景的需求。
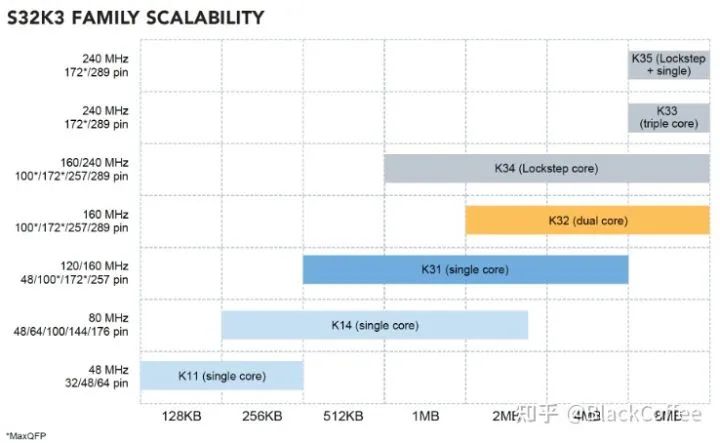
圖4-6 NXP S32K3家族MCU
下面是S32K3 MCU的芯片特性:
(一)可伸縮的MCU平臺(tái):
ARM Cortex-M7內(nèi)核,120-240 MHz運(yùn)行頻率,支持Lockstep模式。
512KB到8MB大小的Flash存儲(chǔ),支持ECC
FOTA支持:A/B模式的固件升級(jí)機(jī)制,支持回滾機(jī)制
低功耗的運(yùn)行與Standby模式,快速喚醒功能,時(shí)鐘與電源門(mén)控設(shè)計(jì)
BGA和MaxQFP封裝,48-289 pin角。相比于標(biāo)準(zhǔn)的QFP封裝,新的MaxQFP封裝可以大大減小封裝footprint。
AEC-Q100可靠性認(rèn)證:Grade 1 (-40 °C 到 +125 °C) 和Grade 2 (-40 °C to +105 °C)
(二)Safety、Security和外設(shè)接口特性:
ISO 26262功能安全:最高可支持到ASIL-D級(jí)別
失效收集和控制單元(Fault Collection and Control Unit, FCCU)
硬件Watchdog,軟件Watchdog計(jì)時(shí)器,時(shí)鐘/電源/溫度監(jiān)控機(jī)制。
NXP SafeAssure支持
硬件Security引擎(HSE):ASE-128/192/256,RSA和ECC加密,Secure Boot,密鑰導(dǎo)入和存儲(chǔ),側(cè)信道保護(hù)機(jī)制,ISO 21434等。
TSN以太網(wǎng)、I3C、CAN-FD、FlexIO(SPI/IIC/IIS等)、QSPI接口和串行Audio接口
專(zhuān)用的電機(jī)控制外設(shè)接口:enhanced Modular IO Subsystem(eMIOS), Logic Control Unit (LCU), TRGMUX, Body Cross-triggering Unit (BCTU), Analog to Digital Converter (ADC), and Analog Comparator (CMP)
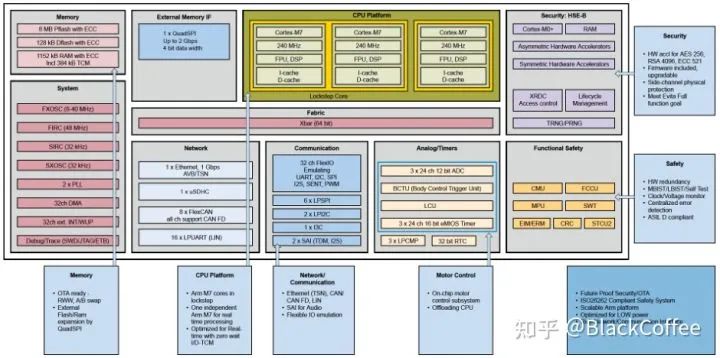
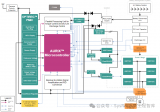
圖4-7 S32K3xx MCU Block Diagram
NXP也提供了完整的軟件解決方案,可以極大降低客戶開(kāi)發(fā)車(chē)載控制器產(chǎn)品的難度,縮短產(chǎn)品開(kāi)發(fā)周期。下圖4-7是NXP S32K3的軟件棧:
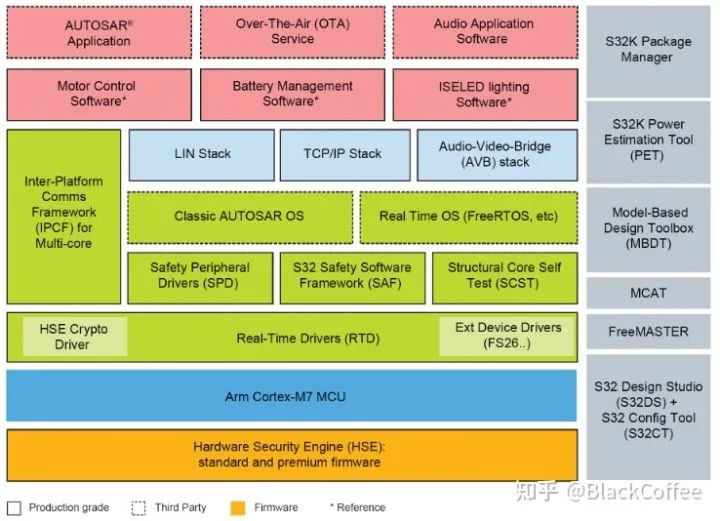
圖4-8 S32K3xx MCU解決方案的軟件棧
(一) 軟件解決方案中的標(biāo)準(zhǔn)軟件部分(產(chǎn)品級(jí)質(zhì)量保證,且無(wú)需額外付費(fèi))包括:
HSE固件:標(biāo)準(zhǔn)版本的HSE Firmware是可以升級(jí)的
Real-Time Drivers(RTD):覆蓋所有MCU外設(shè)IP的實(shí)時(shí)驅(qū)動(dòng)程序,ISO 26262 ASIL-D兼容,AutoSAR 4.4規(guī)范兼容。可以通過(guò)NXP S32的配置工具等進(jìn)行配置。
Safety Peripheral Drivers:跟S32K3芯片中的硬件功能安全特性相關(guān)的驅(qū)動(dòng)程序,包括:BIST管理器、擴(kuò)展MCU錯(cuò)誤管理器(eMcem)等。
IPC框架:核間通信和資源共享的Framework。比如:AutoSAR CP系統(tǒng)和非AutoSAR的RTOS軟件之間,可以使用這一套基于共享內(nèi)存的IPC框架來(lái)進(jìn)行快速通信。
(二) 需要付費(fèi)購(gòu)買(mǎi)商業(yè)License的軟件包括:
安全軟件框架(Safety Software Framework,SAF):主要包括支持失效檢測(cè)的庫(kù)程序,以及芯片啟動(dòng)時(shí)、運(yùn)行時(shí)的單點(diǎn)失效處理和失效恢復(fù)程序庫(kù)。基于SAF,用戶更加便于開(kāi)發(fā)滿足既定功能安全目標(biāo)的軟件功能。
結(jié)構(gòu)化的核心自檢程序庫(kù)(Structural Core Self-Test Library):用于在運(yùn)行時(shí)檢測(cè)處理器核心中永久的硬件失效,可以高達(dá)90%的診斷覆蓋率。
HSE固件:OEM特定的定制版HSE固件
AMMCLIB(Automotive Math and Motor Control Library):NXP專(zhuān)利的、用于各種電機(jī)控制的算法數(shù)學(xué)庫(kù)。這是車(chē)規(guī)級(jí)軟件(SPICE Level 3和CMMI軟件流程認(rèn)證),包含MATLAB/Simulink模型以及相應(yīng)的C代碼庫(kù)程序。
BMS系統(tǒng)中的安全程序庫(kù):包含在BMS的參考設(shè)計(jì)中。
總結(jié)一下NXP S32K3系列MCU產(chǎn)品的競(jìng)爭(zhēng)優(yōu)勢(shì):
1.優(yōu)秀的可伸縮MCU平臺(tái):基于ARM Cortex-M系列內(nèi)核,從單核、多核以及鎖步核模式的配置,ASIL-D功能安全,以及低功耗設(shè)計(jì)。
2.面向未來(lái)的芯片特性:HSE支持對(duì)稱以及非對(duì)稱加密算法,安全啟動(dòng),密鑰管理等。
3.完整的軟件SDK:SDK中內(nèi)置免費(fèi)的、車(chē)規(guī)級(jí)的基礎(chǔ)系統(tǒng)軟件,面向領(lǐng)域的上層應(yīng)用軟件參考設(shè)計(jì),豐富的開(kāi)發(fā)工具和專(zhuān)業(yè)的電機(jī)控制數(shù)學(xué)庫(kù)算法等。
3.2 S32S系列微處理器
NXP S32S24和S32S247系列安全微控制器和微處理器,針對(duì)電動(dòng)汽車(chē)中需要高安全可靠的車(chē)輛動(dòng)力域控制器系統(tǒng)(Vehicle Dynamics Control System)和安全協(xié)處理器應(yīng)用場(chǎng)景,支持最高等級(jí)的ASIL-D功能安全級(jí)別:
需要ASIL-D級(jí)別安全容錯(cuò)功能的車(chē)輛動(dòng)力系統(tǒng)應(yīng)用,比如:制動(dòng)控制器、轉(zhuǎn)向控制器和電機(jī)控制器等。
需要出色的性能、ASIL-D安全等級(jí)和存儲(chǔ)能力的HEV/EV電控域控制器應(yīng)用場(chǎng)景,以應(yīng)對(duì)多種能力源的復(fù)雜能源管理問(wèn)題。
高性能的安全協(xié)處理器,可用作主雷達(dá)、視覺(jué)和傳感器融合處理器的安全檢測(cè)器。
下圖4-9是S32S系列處理器的功能模塊圖:
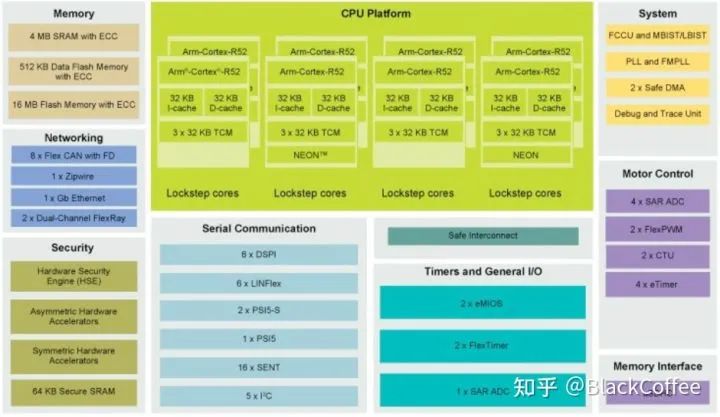
圖4-9 S32S系列處理器的功能模塊圖
下面是S32S處理器的一些關(guān)鍵特性:
滿足汽車(chē)可靠性和ISO 26262 ASIL-D功能安全的芯片設(shè)計(jì)。
總共8個(gè)基于ARM v8架構(gòu)的Cortex-R52實(shí)時(shí)安全內(nèi)核,支持雙核鎖步模式,其中4個(gè)核帶有ARM NEON SIMD指令支持。最高運(yùn)行頻率可到800MHz,CPU算力最大可高達(dá)6K+ DMIPS。
大容量集成Flash閃存:至少為16MB,最大可達(dá)64MB
先進(jìn)的Flash閃存更新功能:即時(shí)(On-the-Fly)無(wú)線(Over-the-Air)閃存更新功能,將處理器停機(jī)時(shí)間將為零。
基于ARM Cortex-R52內(nèi)核的Hypervisor虛擬化支持:通過(guò)Hypervisor實(shí)現(xiàn)硬件資源的分區(qū)隔離,確保多個(gè)用戶應(yīng)用程序互相不影響。
功能安全:高級(jí)芯片失效檢測(cè)與恢復(fù)機(jī)制,可以幫助用戶檢測(cè)、隔離和處理芯片失效,而無(wú)需系統(tǒng)停機(jī)。
硬件安全引擎HSE:用戶可編程的HSE支持各種基于公鑰和私鑰的加密算法,旨在保護(hù)免于各種惡意的黑客網(wǎng)絡(luò)攻擊。
AEC-Q100 Grade 1:-40 °C 到 +150 °C溫度范圍
基于NXP S32S系列安全微處理器,用戶可以開(kāi)發(fā)出集成度更高、更加智能的汽車(chē)動(dòng)力域控制器產(chǎn)品。
4.整車(chē)控制系統(tǒng)的發(fā)展趨勢(shì)
當(dāng)前汽車(chē)EE架構(gòu)的發(fā)展趨勢(shì)是從分布式ECU架構(gòu)演進(jìn)到域集中式架構(gòu)。目前正在量產(chǎn)或即將量產(chǎn)的車(chē)型大部分都是基于域集中式EEA。特斯拉已經(jīng)率先發(fā)展到“中央計(jì)算+區(qū)域”的EE架構(gòu),根據(jù)預(yù)測(cè)2025年后,國(guó)內(nèi)大部分主機(jī)廠也將開(kāi)始演進(jìn)到中央計(jì)算+區(qū)域EE架構(gòu)。部分領(lǐng)先的廠商明后年就會(huì)有基于“中央計(jì)算+區(qū)域”EE架構(gòu)的車(chē)型量產(chǎn)落地。
正如圖4-1所顯示,經(jīng)典的動(dòng)力總成系統(tǒng)通常包含了“驅(qū)動(dòng)電機(jī)”、“電機(jī)控制器”、“減速器”、“車(chē)載充電器”、“直流變換器”、“配電箱”、“整車(chē)控制器VCU”和“電池管理器”等八大部件。顯然,相較于座艙域和自動(dòng)駕駛域,整車(chē)控制域顯得更為分散、集成度更低。在當(dāng)前汽車(chē)域集中式EE架構(gòu)的發(fā)展趨勢(shì)下,整車(chē)控制系統(tǒng)朝著“集成化”和“域控化”演進(jìn)是兩大主流發(fā)展趨勢(shì)。
(一)集成化
從最早的驅(qū)動(dòng)電機(jī)、變速器和電機(jī)控制器“三合一”開(kāi)始,這兩年國(guó)內(nèi)主機(jī)廠和動(dòng)力總成Tier 1供應(yīng)商陸續(xù)推出了集成化程度更高的“多合一”動(dòng)力總成系統(tǒng)。集成化程度更高的好處是顯而易見(jiàn)的,比如:可以大大減小電驅(qū)動(dòng)系統(tǒng)的體積,降低系統(tǒng)的總重量;集成度更高也意味著降低生產(chǎn)成本;此外減重也可以反過(guò)來(lái)增加xEV的續(xù)航里程。
2021年9月在比亞迪最新發(fā)布的E平臺(tái)3.0中,很重要的一個(gè)亮點(diǎn)就是動(dòng)力總成部件的“八合一”集成化,將傳統(tǒng)的八大部件深度融合集成到了一起。如下圖4-10。高度集成化使得整體體積可以降低20%,重量減輕15%左右。
2021年7月,長(zhǎng)安汽車(chē)發(fā)布第二代電驅(qū)動(dòng)一體化系統(tǒng),集成了整車(chē)控制器(VCU)、高壓分線盒、電機(jī)控制器、直流變換器、充電機(jī)、電機(jī)、減速器七個(gè)部件,在綜合性能方面較第一代的“三合一”(集成電機(jī)、電控、減速器)系統(tǒng)有顯著的提升,體積減少5%、重量降低10%、功率密度提升37%、效率提升5%。
(二)域控化
電驅(qū)動(dòng)力系統(tǒng)的多合一集成化也帶動(dòng)了動(dòng)力總成系統(tǒng)中原本分散的控制器單元朝著集中式的域控制器融合發(fā)展。性能更強(qiáng)勁的域控制器促進(jìn)了從模塊到系統(tǒng)的融合、再進(jìn)一步到整體方案的融合。
比如比亞迪E平臺(tái)3.0中的智能動(dòng)力域控制器,將原來(lái)的VCU、BMS、電機(jī)控制器以及DC/DC和AC/DC的控制部分都集成到了動(dòng)力域控制器平臺(tái)上。
從目前國(guó)內(nèi)外相關(guān)論文來(lái)看,以原有的VCU為基礎(chǔ),升級(jí)為成一個(gè)性能更強(qiáng)勁的汽車(chē)動(dòng)力域控制器(Vehicle Dynamics Controller)平臺(tái),然后整合BMS、電機(jī)控制器、DC/DC和AC/DC相關(guān)的軟硬件功能是一個(gè)趨勢(shì)。如下圖4-12所示,其中紫色的虛線箭頭表示原來(lái)由單個(gè)ECU控制器實(shí)現(xiàn)的相應(yīng)功能向性能更強(qiáng)勁的動(dòng)力域控制器上遷移。
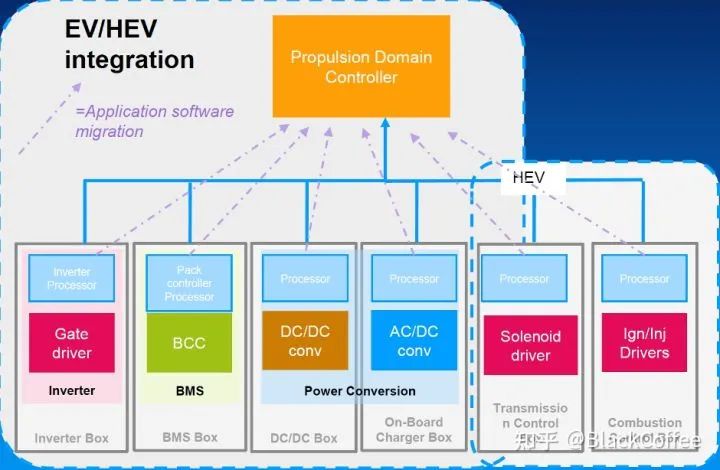
圖4-12 原有控制器上的應(yīng)用軟件往動(dòng)力域控制器上遷移與集成
在這種發(fā)展趨勢(shì)下,原來(lái)最高頻率不超過(guò)200MHz的MCU芯片顯然不能提供動(dòng)力域控制器所需的性能。也正因如此,NXP即將發(fā)布基于最新的Cortex-R52內(nèi)核、運(yùn)行頻率可高達(dá)800MHz的S32S系列安全微處理器。S32S安全微處理器基于ARM-v8架構(gòu)的R52內(nèi)核還支持虛擬化技術(shù),通過(guò)Hypervisor還能對(duì)集成到同一個(gè)平臺(tái)上的不同應(yīng)用軟件做很好的隔離,以確保系統(tǒng)的安全可靠性。下圖4-13是NXP最新發(fā)布的車(chē)規(guī)MCU產(chǎn)品線的路線圖,可以看到面向應(yīng)用復(fù)雜度越來(lái)越高的汽車(chē)動(dòng)力域控制器場(chǎng)景,NXP將推出性能更強(qiáng)勁的MCU產(chǎn)品。
有了更高性能的動(dòng)力域控制器平臺(tái),我們就可能?chē)L試更復(fù)雜的模型預(yù)測(cè)控制算法,從而可以讓VCU對(duì)需求扭矩做更好的控制,對(duì)動(dòng)力電池能量的使用做更好的管理,提升電車(chē)的續(xù)航里程。
新能源汽車(chē)市場(chǎng)已經(jīng)進(jìn)入到市場(chǎng)爆發(fā)的拐點(diǎn),同時(shí)也進(jìn)入到后補(bǔ)貼的時(shí)代。作為核心部件的電驅(qū)動(dòng)力系統(tǒng)在整車(chē)成本、架乘體驗(yàn)、汽車(chē)安全、續(xù)航里程等方面起決定性因素,將是各大主機(jī)廠和Tier 1廠商研發(fā)投入的重點(diǎn)方向。
審核編輯:郭婷
-
電動(dòng)汽車(chē)
+關(guān)注
關(guān)注
156文章
12154瀏覽量
231878 -
芯片
+關(guān)注
關(guān)注
456文章
51059瀏覽量
425670 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6645瀏覽量
110732
原文標(biāo)題:整車(chē)控制域及芯片方案解析
文章出處:【微信號(hào):汽車(chē)電子嵌入式,微信公眾號(hào):汽車(chē)電子嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)的控制器硬件架構(gòu)
電動(dòng)汽車(chē)動(dòng)力系統(tǒng)中IGBT全面解析

英國(guó)超越德國(guó),成2024年歐洲最大純電動(dòng)汽車(chē)市場(chǎng)
電動(dòng)汽車(chē)充電系統(tǒng)設(shè)計(jì)與運(yùn)營(yíng)平臺(tái)方案探究
電動(dòng)汽車(chē)充電樁系統(tǒng)方案設(shè)計(jì)
直流快速電動(dòng)汽車(chē)充電器的設(shè)計(jì)技巧與解決方案
電動(dòng)汽車(chē)儲(chǔ)能系統(tǒng)的作用和特點(diǎn)
電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)的組成和特點(diǎn)
如何讓電動(dòng)汽車(chē)更安全

電動(dòng)汽車(chē)用電動(dòng)機(jī)的種類(lèi)及控制方法
起亞四月全球銷(xiāo)量微增0.6%,純電動(dòng)汽車(chē)銷(xiāo)量上漲
什么是汽車(chē)電控系統(tǒng)?電動(dòng)汽車(chē)電控系統(tǒng)的核心解析

純電動(dòng)汽車(chē)電池?zé)峁芾砑夹g(shù)研究進(jìn)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論