") STM32驅(qū)動舵機的工作原理、規(guī)格和選型分析
STM32驅(qū)動舵機的工作原理、規(guī)格和選型分析
?
最近幾年,國內(nèi)機器人開始起步發(fā)展,很多高校及中小學都開始進行機器人技術(shù)教學。小型的機器人、模塊化的機器人、組件式的機器人是教學機器人的首選。在這些機器人產(chǎn)品中,舵機是十分關(guān)鍵,且使用較多的部件。
根據(jù)控制方式,舵機應該稱為“微型伺服馬達”。早期在模型上使用最多,主要用于控制模型的舵面,所以俗稱“舵機”。舵機接受一個簡單的控制指令,就可以自動轉(zhuǎn)動到一個比較精確的角度,所以非常適合在關(guān)節(jié)型機器人產(chǎn)品使用。
一、舵機的結(jié)構(gòu)
簡單來說,舵機就是集成了直流電機、電機控制器和減速器等,并封裝在一個便于安裝的外殼里的伺服單元;能夠利用簡單的輸入信號比較精確的轉(zhuǎn)動,給定角度的電機系統(tǒng)。
舵機安裝了一個電位器(或其它角度傳感器)檢測輸出軸轉(zhuǎn)動角度,控制板根據(jù)電位器的信息能比較精確的控制和保持輸出軸的角度。這樣的直流電機控制方式叫閉環(huán)控制,所以舵機更準確的說是伺服馬達,英文:servo。
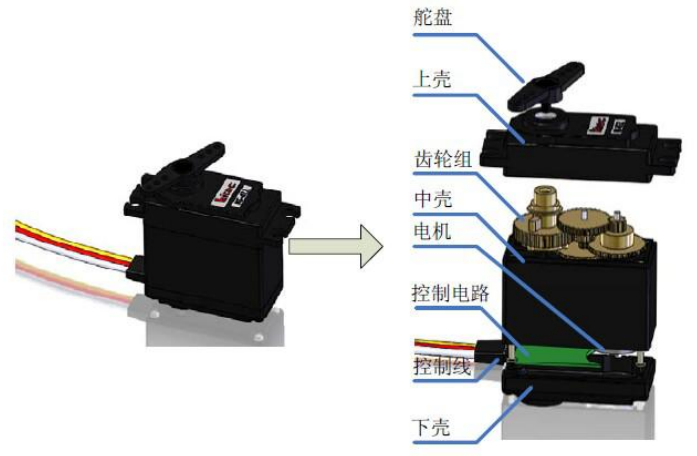
舵機的主體結(jié)構(gòu)如圖所示,主要有幾個部分:外殼、減速齒輪組、電機、電位器、控制電路。
簡單的工作原理是:控制電路接收信號源的控制信號,并驅(qū)動電機轉(zhuǎn)動;齒輪組將電機的速度成大倍數(shù)縮小,并將電機的輸出扭矩放大響應倍數(shù),然后輸出;電位器和齒輪組的末級一起轉(zhuǎn)動,測量舵機軸轉(zhuǎn)動角度;電路板檢測并根據(jù)電位器判斷舵機轉(zhuǎn)動角度,然后控制舵機轉(zhuǎn)動到目標角度或保持在目標角度。
舵機的外殼一般是塑料的,特殊的舵機可能會有金屬鋁合金外殼。金屬外殼能夠提供更好的散熱,可以讓舵機里面的電機運行在更高功率下,以提供更高的扭矩輸出。當然,金屬外殼也可以提供更牢固的固定位置。
舵機的齒輪箱有塑料齒輪、混合齒輪、金屬齒輪的差別。塑料齒輪成本低,噪音小,但強度較低;金屬齒輪強度高,但成本高,在裝配精度一般的情況下會有很大的噪音。小扭矩舵機、微舵、扭矩大但功率密度小的舵機一般都用塑料齒輪,如Futaba3003,輝盛的9g微舵。
金屬齒輪一般用于功率密度較高的舵機上,比如輝盛的MG995舵機,在和3003一樣體積的情況下卻能提供13KG的扭矩。Hitec甚至用鈦合金作為齒輪材料,其高強度能保證3003大小的舵機能提供20幾公斤的扭矩。混合齒輪在金屬齒輪和塑料齒輪間做了折中,在電機輸出減速箱扭矩不大的部位,用塑料齒輪。
二、舵機的規(guī)格和選型
1、舵機轉(zhuǎn)速
轉(zhuǎn)速由舵機無負載的情況下轉(zhuǎn)過60°角所需時間來衡量,常見舵機的速度一般在0.11s/60°-0.21s/60°之間。
2、舵機扭矩
舵機扭矩的單位是KG·CM,這是一個扭矩單位。可以理解為在舵盤上距舵機軸中心水平距離1CM處,舵機能夠帶動的物體重量。
3、工作電壓
廠商提供的速度、轉(zhuǎn)矩數(shù)據(jù)和測試電壓有關(guān),在4.8V和6V兩種測試電壓下這兩個參數(shù)有比較大的差別。比如,MG995在4.8V時速度為0.17秒,在6.0V時速度為0.13秒。
舵機的工作電壓對性能有重大的影響,舵機推薦的電壓一般都是4.8V或6V。當然,有的舵機可以在7V以上工作,比如12V的舵機也不少。具體更加較高的電壓可以提高電機的速度和扭矩。此外,選擇舵機還需要看我們的控制板所能提供的電壓。
4、尺寸重量和材質(zhì)
舵機的功率(速度×轉(zhuǎn)矩)和舵機的尺寸比值可以理解為該舵機的功率密度,一般同樣品牌的舵機,功率密度大的價格高。塑料齒輪的舵機在超出極限負荷的條件下使用可能會崩齒,金屬齒輪的舵機則可能會電機過熱損毀或外殼變形。所以,材質(zhì)的選擇并沒有絕對的傾向,關(guān)鍵是將舵機使用在設(shè)計規(guī)格之內(nèi)。
用戶一般都對金屬制的物品比較信賴,齒輪箱期望選擇全金屬的,舵盤期望選擇金屬舵盤。但需要注意的是,金屬齒輪箱在長時間過載下也不會損毀,最后卻是電機過熱損壞或外殼變形,而這樣的損壞是致命的,不可修復的。塑料出軸的舵機如果使用金屬舵盤是很危險的,舵盤和舵機軸在相互扭轉(zhuǎn)過程中,金屬舵盤不會磨損,舵機軸會在一段時間后變得光禿,導致舵機完全不能使用。
綜上,選擇舵機需要在計算自己所需扭矩和速度,并確定使用電壓的條件下,選擇有150%左右甚至更大扭矩富余的舵機。
三、舵機的工作原理
舵機是一個微型的伺服控制系統(tǒng),具體的控制原理可以用下圖表示:
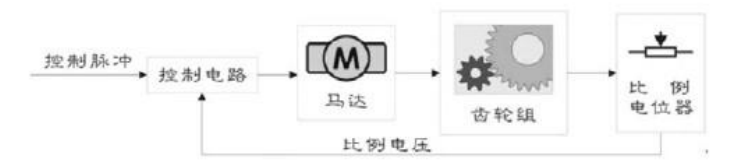
其工作原理是:控制電路接收信號源的控制脈沖,并驅(qū)動電機轉(zhuǎn)動;齒輪組將電機的速度成大倍數(shù)縮小,并將電機的輸出扭矩放大響應倍數(shù),然后輸出;電位器和齒輪組的末級一起轉(zhuǎn)動,測量舵機軸轉(zhuǎn)動角度;電路板檢測并根據(jù)電位器判斷舵機轉(zhuǎn)動角度,然后控制舵機轉(zhuǎn)動到目標角度或保持在目標角度。
模擬舵機需要一個外部控制器(遙控器的接收機或者單片機)產(chǎn)生脈寬調(diào)制信號來告訴舵機轉(zhuǎn)動角度,脈沖寬度是舵機控制器所需的編碼信息。舵機的控制脈沖周期20ms,脈寬從0.5ms-2.5ms,分別對應-90度到+90度的位置(對于180°舵機)。??
舵機的控制一般需要一個20ms的時基脈沖,該脈沖的高電平部分一般為0.5ms~2.5ms范圍內(nèi)的角度控制脈沖部分。以180度角度舵機為例,那么對應的控制關(guān)系是這樣的:
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度;
如下圖所示:
需要解釋的是,舵機原來主要用在飛機、汽車、船只模型上,作為方向舵的調(diào)節(jié)和控制裝置。所以,一般的轉(zhuǎn)動范圍是45°、60°或者90°,這時候脈沖寬變一般只有1ms-2ms之間。比如你做一個遙控小車,用舵機控制方向,那么舵機轉(zhuǎn)的角度肯定不是180度,因為你見過你開的車方向能轉(zhuǎn)180度嗎?
而后舵機開始在機器人上得到大幅度的運用,轉(zhuǎn)動的角度也在根據(jù)機器人關(guān)節(jié)的需要增加到-90°至90°之間,甚至還有-135°至135°之間,脈沖寬度也隨之有了變化。對于機器人控制而言,我們一般通過單片機產(chǎn)生PWM信號控制舵機。
四、STM32控制舵機代碼
0.5ms---------0度 0.6ms---------9度 0.7ms---------18度 0.8ms---------27度 0.9ms---------36度 1.0ms---------45度 1.1ms---------54度 1.2ms---------63度 1.3ms---------72度 1.4ms---------81度 1.5ms---------90度 1.6ms---------99度 1.7ms---------108度 1.8ms---------117度 1.9ms---------126度 2.0ms---------135度 2.1ms---------144度 2.2ms---------153度 2.3ms---------162度 2.4ms---------171度 2.5ms---------180度 |/ ---|---/ |/ |/ |/ -------------------------------------------------------------- 20ms的時基脈沖,如果想讓舵機轉(zhuǎn)63度,就應該發(fā)生一個高電平為1.2ms, 周期為20ms的方波,duty=1.2/20=6%,而定時器自動重裝載寄存器arr的值 為1000,所以令duty=60,時占空比才為60/1000=6%. 20ms的時基脈沖,如果想讓舵機轉(zhuǎn)90度,就應該發(fā)生一個高電平為1.5ms, 周期為20ms的方波,duty=1.5/20=7.5%,而定時器自動重裝載寄存器arr的值 為1000,所以令duty=75,時占空比才為75/1000=7.5%. 20ms的時基脈沖,如果想讓舵機轉(zhuǎn)126度,就應該發(fā)生一個高電平為1.9ms, 周期為20ms的方波,duty=1.9/20=9.5%,而定時器自動重裝載寄存器arr的值 為1000,所以令duty=95,時占空比才為95/1000=9.5%. ----------------------------------------------------------------- voidSERVO_Init(void) { GPIO_InitTypeDefGPIO_InitStruct; TIM_TimeBaseInitTypeDefTIM_TimeStructure; TIM_OCInitTypeDefTIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;//配置為復用推挽輸出 GPIO_InitStruct.GPIO_Pin=GPIO_Pin_7; GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); TIM_TimeStructure.TIM_Period=1000;//1000自動重裝載寄存器的值,周期為50000Hz/1000=50Hz,即輸出PWM波形的頻率為20ms。 TIM_TimeStructure.TIM_Prescaler=1440-1;;// 1400時鐘預分頻系數(shù)為3600,72 000000Hz/1400=50000Hz =50KHZ。 TIM_TimeStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeStructure.TIM_RepetitionCounter=0; TIM_TimeBaseInit(TIM3,&TIM_TimeStructure); TIM_ARRPreloadConfig(TIM3,ENABLE);//使能ARR預裝載寄存器(影子寄存器) TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse=0;//占空比大小 TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; TIM_OC2Init(TIM3,&TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); TIM_Cmd(TIM3,ENABLE); TIM_CtrlPWMOutputs(TIM3,ENABLE); } //舵機角度控制 voidSERVO_Angle_Control(uint16_tCompare2) { TIM_SetCompare2(TIM3,Compare2);//設(shè)置通道2為可變的pwm } 配置號上面的程序,如果你想讓舵機旋轉(zhuǎn)90度,只需要在你程序的某個位置放上這句話就可以了。
SERVO_Angle_Control(75);//舵機旋轉(zhuǎn)90度
原因就是20ms的時基脈沖,如果想讓舵機轉(zhuǎn)90度,就應該發(fā)生一個高電平為1.5ms,周期為20ms的方波,duty=1.5/20=7.5% ,而定時器自動重裝載寄存器arr的值為 1000 ,所以令duty=75,時占空比才為75/1000=7.5%。
以此類推,你想讓舵機轉(zhuǎn)多大的角度按照這個方法設(shè)置就行了。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2552文章
51286瀏覽量
755100 -
控制器
+關(guān)注
關(guān)注
112文章
16413瀏覽量
178743 -
機器人
+關(guān)注
關(guān)注
211文章
28557瀏覽量
207673
原文標題:STM32驅(qū)動舵機原理和實現(xiàn)
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
舵機與電動機的比較分析
舵機的工作原理和應用
伺服驅(qū)動器的工作原理解析 伺服驅(qū)動器選型注意事項
步進電機驅(qū)動器的主要工作原理是什么?
線路驅(qū)動器工作原理_線路驅(qū)動器輸入差模電壓范圍
舵機在無人機中的應用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論