 基于OpenHarmony的智慧牧場方案:室內管理系統篇
基于OpenHarmony的智慧牧場方案:室內管理系統篇
《智慧牧場之生物姿態檢測篇》
《智慧牧場之生物心率檢測篇》
《生物運動軌跡跟蹤篇》
1. 背景知識1.1室內管理系統的意義
在智慧牧場解決方案中,隨著科技的發展,物聯網、無線通信、大數據計算等技術的不斷發展,在越來越多行業中得到應用,智能化生產的概念也深入人心。為提升養殖業的投入產出比、減少料肉/奶比、提升生產效率、改善養殖環境的生態環境、減低禽畜疫病滋生的可能性,打造一體化、數字式、自動化的管理模式。而室內管理系統,是其中的重中之重,也最為復雜。
1.2室內管理系統涵蓋內容
以養牛為例,利用光照、溫、濕度、日照等傳感器實時采集分析畜牛棚室內光照強度、空氣和氨氣、日照等環境參數,并自動調節開啟或關閉所需設備(比如:包括天窗,水幕,風扇、水泵、污水處理等)。實時檢測氣態濃度、H2S濃度、CO2濃度、光照強度、氣壓、灰塵、環境噪聲、環境溫度、奶牛體溫及錄像圖像,由模型分析,遙控或自動控制濕簾風機、噴淋滴灌、供暖照明、排風扇、開窗機等通風換氣設備等設備。為了保證高產量、高質量、生態、安全的奶牛安全,確保室內環境最適合家畜生長并提高奶牛福利。
使用機器人和流水線飼喂奶牛,記錄奶牛飲食數據,同時給每一頭牛戴上智能項圈和計步手環,對牛只的身體狀況和運動數據實時監控。同時監控用水用料的數據,動態調整投喂策略,包括投喂量和投喂頻率(包括:飼喂機和自動飲水器)。
智能養牛的室內管理系統采用奶廳智能檢測系統,自動識別奶牛身份,自動上傳班次擠奶情況。同時可以根據溫度自動控制風機、噴淋、和光照設備,保證每一頭牛在極度舒適的情緒下產奶。
使用室內空氣溫控技術,實現從牧場產奶到零售終端全程冷鏈和無漏點式溫度監控。
與此同時,在牛棚內設置攝像機等監測設備,對大棚內7-24小時連續監測,實現了奶牛養殖的智能化生產與科學管理。
2. 解決方案概要
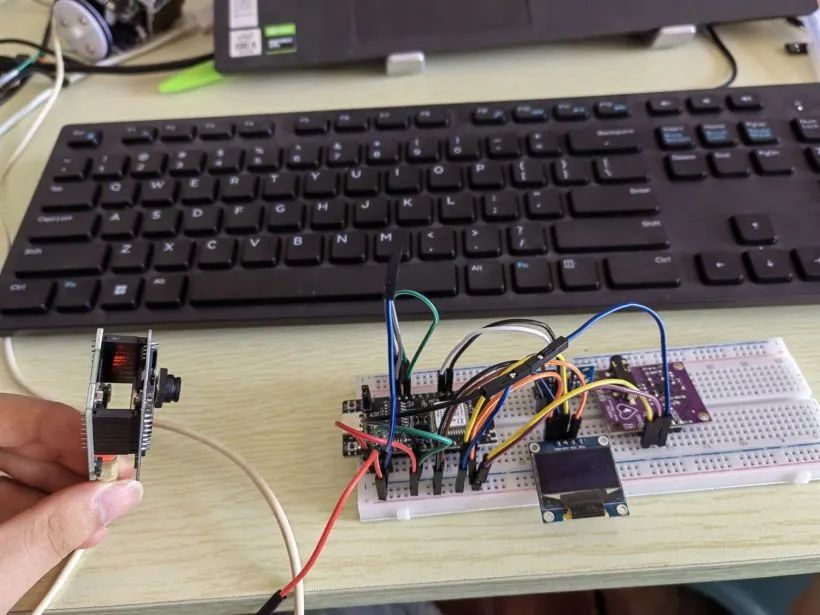
該方案嘗試用OpenHarmony實現光照強度檢測、溫濕度檢測、水位控制和圖傳部分。

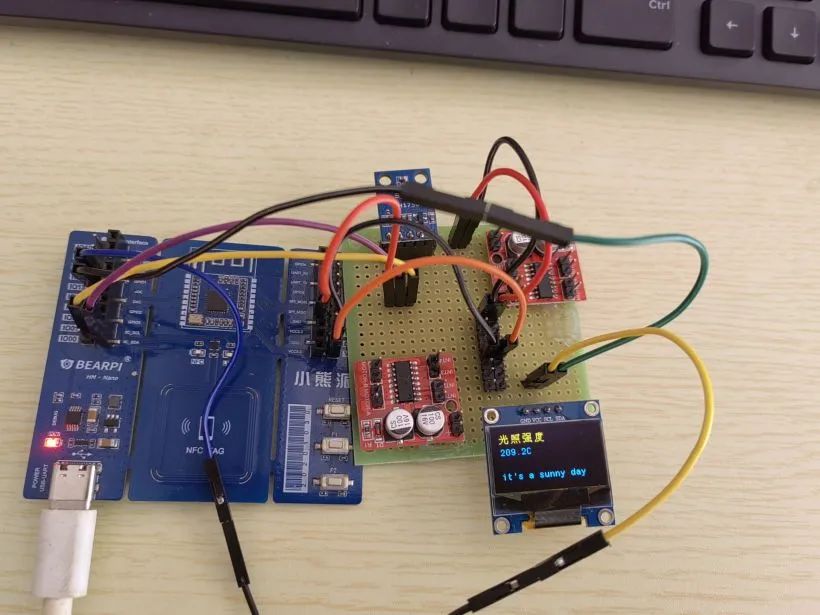
3.1 光照檢測傳感器BH1750
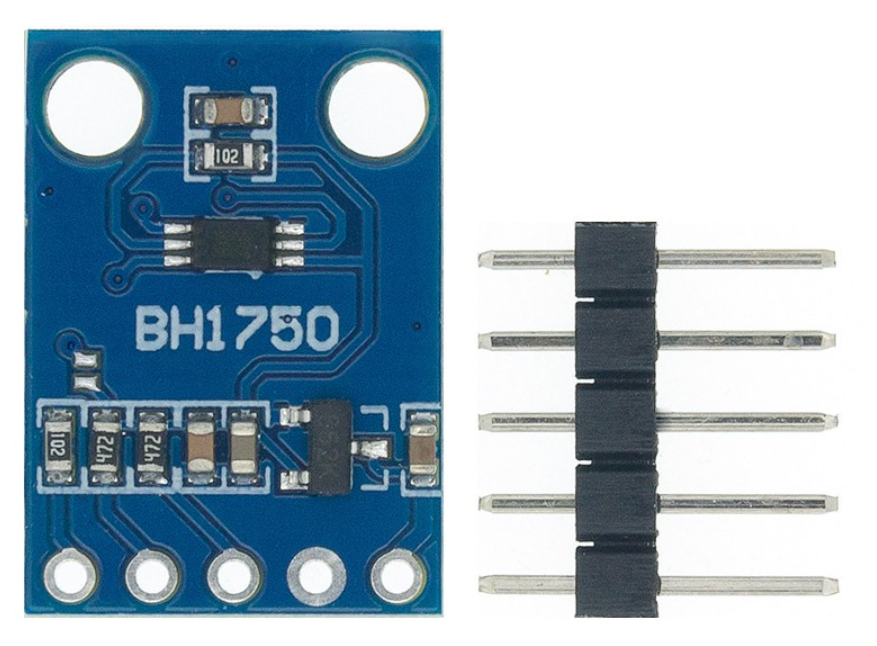
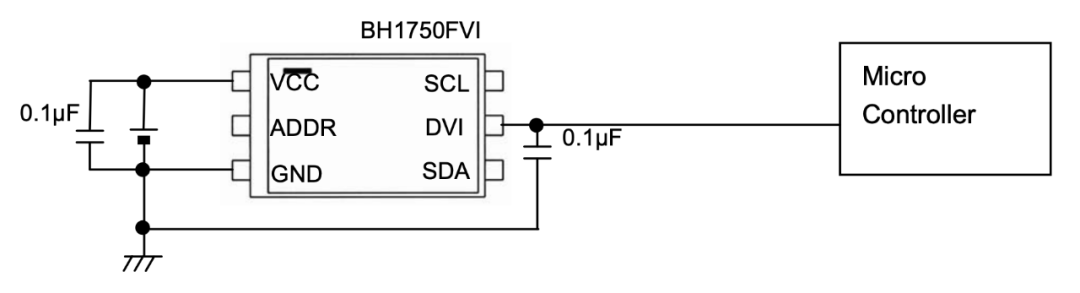
典型的電路應用如下:
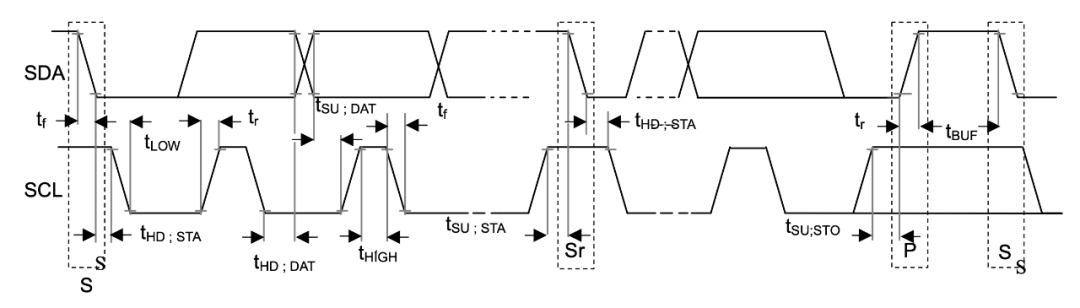
I2C總線時序圖如下:
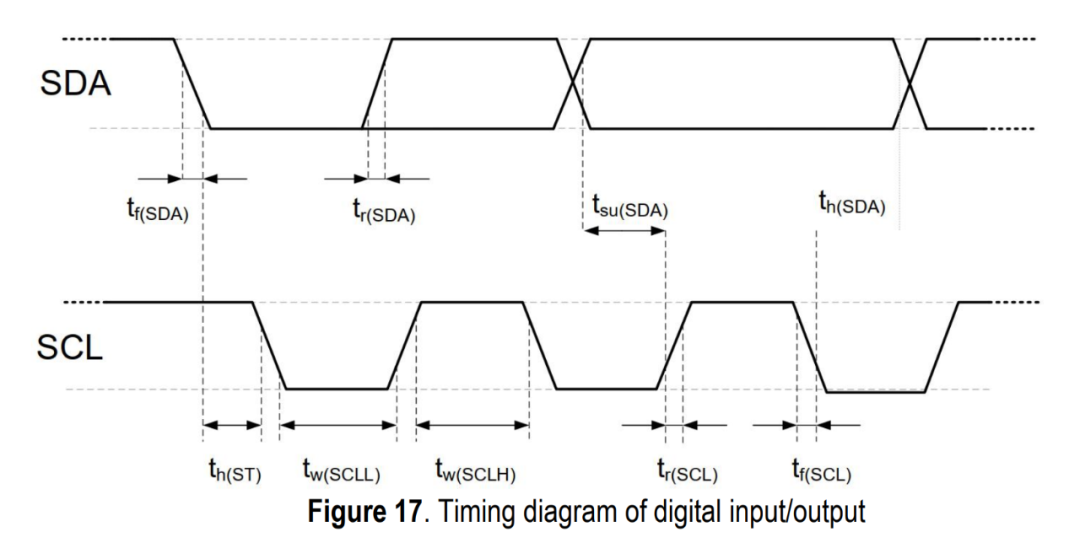
3.2 濕度和溫度傳感器 SHT20
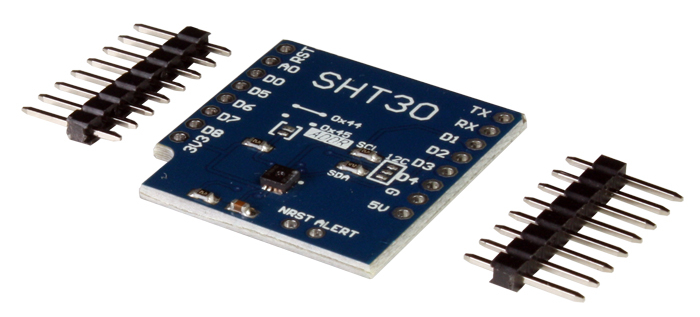
典型的電路應用如下:
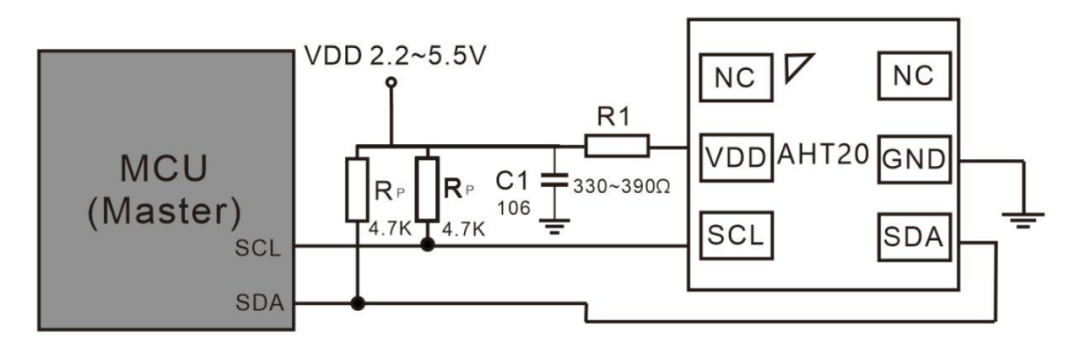
時序圖如下:
4. 軟件設計
4.1 光照強度部分:
/***************************************************************
* 函數名稱: Start_BH1750
* 說 明: 啟動BH1750
* 參 數: 無
* 返 回 值: 無
***************************************************************/
void Start_BH1750(void)
{
WifiIotI2cData bh1750_i2c_data = {0};
uint8_t send_data[1] = {0x10};
bh1750_i2c_data.sendBuf = send_data;
bh1750_i2c_data.sendLen = 1;
I2cWrite(WIFI_IOT_I2C_IDX_1, (BH1750_Addr << 1) | 0x00, &bh1750_i2c_data);
}
4.2 溫濕度部分:
/***************************************************************
* 函數名稱: Init_SHT30
* 說 明: 初始化SHT30,設置測量周期
* 參 數: 無
* 返 回 值: 無
***************************************************************/
void Init_SHT30(void)
{
WifiIotI2cData sht30_i2c_data = {0};
uint8_t send_data[2] = {0x22, 0x36};
sht30_i2c_data.sendBuf = send_data;
sht30_i2c_data.sendLen = 2;
I2cWrite(WIFI_IOT_I2C_IDX_1, (SHT30_Addr << 1) | 0x00, &sht30_i2c_data);
}
4.3 水位控制部分:
static float GetVoltage(void)
{
unsigned int ret;
unsigned short data;
ret = AdcRead(WIFI_IOT_ADC_CHANNEL_2, &data, WIFI_IOT_ADC_EQU_MODEL_8, WIFI_IOT_ADC_CUR_BAIS_DEFAULT, 0xff);
if (ret != WIFI_IOT_SUCCESS)
{
printf("ADC Read Fail
");
}
return (float)data * 1.8 * 4 / 4096.0;
}
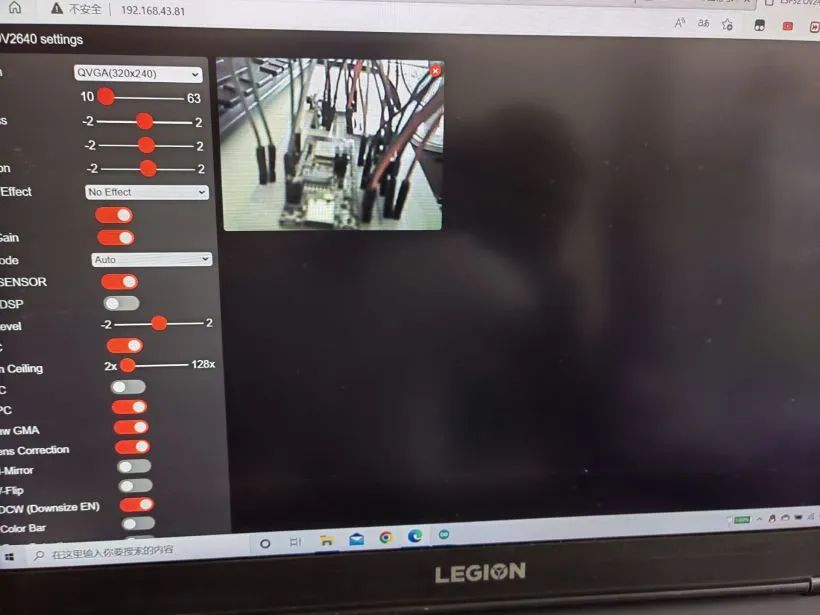
4.4 圖傳部分:
const char* ssid = "**";
const char* password = "123456789";
void startCameraServer();
void setup() {
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t * s = esp_camera_sensor_get();
//initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1);//flip it back
s->set_brightness(s, 1);//up the blightness just a bit
s->set_saturation(s, -2);//lower the saturation
}
//drop down frame size for higher initial frame rate
s->set_framesize(s, FRAMESIZE_QVGA);
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
Serial.println("' to connect");
}
void loop() {
// put your main code here, to run repeatedly:
delay(10000);
}

本文完
更多熱點文章閱讀
- 玩嗨OpenHarmony:基于OpenHarmony的智能助老服務機器人
- 玩嗨OpenHarmony:基于OpenHarmony的智慧農業環境監控系統
- OpenHarmony 3.2 Beta多媒體系列:音視頻播放gstreamer
- 基于OpenHarmony的智慧牧場方案:生物運動軌跡跟蹤篇
-
基于OpenHarmony的智能門禁系統,讓出行更便捷
提示:本文由電子發燒友社區發布,轉載請注明以上來源。如需社區合作及入群交流,請添加微信EEFans0806,或者發郵箱liuyong@huaqiu.com。
原文標題:基于OpenHarmony的智慧牧場方案:室內管理系統篇
文章出處:【微信公眾號:電子發燒友開源社區】歡迎添加關注!文章轉載請注明出處。
-
電子發燒友
+關注
關注
33文章
552瀏覽量
32978 -
開源社區
+關注
關注
0文章
94瀏覽量
423
原文標題:基于OpenHarmony的智慧牧場方案:室內管理系統篇
文章出處:【微信號:HarmonyOS_Community,微信公眾號:電子發燒友開源社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
室內停車場定位導航解決方案


智慧路燈照明管理系統功能與應用
智慧園區管理系統應用
aoa智慧工地室內定位解決方案具體功能及意義
智慧圖書館能耗監測優化管理系統方案

智慧光伏運維管理系統引領光伏電站管理新時代








 工商網監
工商網監
評論