 PID控制器開發筆記之八:帶死區的PID控制器的實現
PID控制器開發筆記之八:帶死區的PID控制器的實現
在計算機控制系統中,由于系統特性和計算精度等問題,致使系統偏差總是存在,系統總是頻繁動作不能穩定。為了解決這種情況,我們可以引入帶死區的PID算法。
1、帶死區PID的基本思想
帶死區的PID控制算法就是檢測偏差值,若是偏差值達到一定程度,就進行調節。若是偏差值較小,就認為沒有偏差。用公式表示如下:
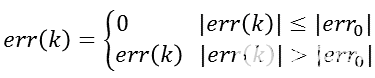
其中的死區值得選擇需要根據具體對象認真考慮,因為該值太小就起不到作用,該值選取過大則可能造成大滯后。
帶死區的PID算法,對無論位置型還是增量型的表達式沒有影響,不過它是一個非線性系統。
除以上描述之外還有一個問題,在零點附近時,若偏差很小,進入死去后,偏差置0會造成積分消失,如是系統存在靜差將不能消除,所以需要人為處理這一點。
2、算法實現
前面我們描述了帶死區的PID控制的基本思想。在接下來我們來實現這一思想,同樣是按位置型和增量型來分別實現。
(1)位置型PID算法實現
前面我們對微分項、積分項采用的不同的優化算法,他們都可以與死區一起作用于PID控制。這一節我們就來實現一個采用抗積分飽和、梯形積分、變積分算法以及不完全微分算法和死區控制的PID算法。首先依然是定義一個PID結構體
接下來我們實現帶死區、抗積分飽和、梯形積分、變積分算法以及不完全微分算法的增量型PID控制器。/*定義結構體和公用體*/
typedef struct
{
float setpoint; /*設定值*/
float kp; /*比例系數*/
float ki; /*積分系數*/
float kd; /*微分系數*/
float lasterror; /*前一拍偏差*/
float preerror; /*前兩拍偏差*/
float deadband; /*死區*/
float result; /*PID控制器計算結果*/
float output; /*輸出值0-100%*/
float maximum; /*輸出值上限*/
float minimum; /*輸出值下限*/
float errorabsmax; /*偏差絕對值最大值*/
float errorabsmin; /*偏差絕對值最小值*/
float alpha; /*不完全微分系數*/
float derivative; /*微分項*/
float integralValue; /*積分累計量*/
}CLASSICPID;
接下來我們實現帶死區、抗積分飽和、梯形積分、變積分算法以及不完全微分算法的增量型PID控制器。
void PIDRegulator(CLASSICPID vPID,float pv)
{
float thisError;
float result;
float factor;
thisError=vPID->setpoint-pv; //得到偏差值
result=vPID->result;
if (fabs(thisError)>vPID->deadband)
{
vPID-> integralValue= vPID-> integralValue+ thisError;
//變積分系數獲取
factor=VariableIntegralCoefficient(thisError,vPID->errorabsmax,vPID->errorabsmin);
//計算微分項增量帶不完全微分
vPID-> derivative =kd*(1-vPID->alpha)* (thisError-vPID->lasterror +vPID->alpha*vPID-> derivative;
result=vPID->kp*thisError+vPID->ki*vPID-> integralValue +vPID-> derivative;
}
else
{
if((abs(vPID->setpoint-vPID->minimum)deadband)&&(abs(pv-vPID->minimum)deadband))
{
result=vPID->minimum;
}
}
/*對輸出限值,避免超調和積分飽和問題*/
if(result>=vPID->maximum)
{
result=vPID->maximum;
}
if(result<=vPID->minimum)
{
result=vPID->minimum;
}
vPID->preerror=vPID->lasterror; //存放偏差用于下次運算
vPID->lasterror=thisError;
vPID->result=result;
vPID->output=((result-vPID->minimum)/(vPID->maximum-vPID->minimum))*100.0;
}
3、總結
引入死區的主要目的是消除穩定點附近的波動,由于測量值的測量精度和干擾的影響,實際系統中測量值不會真正穩定在某一個具體的值,而與設定值之間總會存在偏差,而這一偏差并不是系統真實控制過程的反應,所以引入死區就能較好的消除這一點。
當然,死區的大小對系統的影響是不同的。太小可能達不到預期的效果,而太大則可能對系統的正常變化造成嚴重滯后,需要根據具體的系統對象來設定。
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16416瀏覽量
178762 -
PID
+關注
關注
35文章
1473瀏覽量
85649 -
計算機控制
+關注
關注
0文章
36瀏覽量
10766 -
PID控制器
+關注
關注
2文章
173瀏覽量
18620
發布評論請先 登錄
相關推薦
PID控制器開發筆記之一:PID算法原理及基本實現
PID控制器開發筆記之三:抗積分飽和PID控制器的實現
PID控制器開發筆記之四:梯形積分PID控制器的實現

PID控制的理論和PID控制器設計的及PID控制器參數整定的以及分析





 工商網監
工商網監
評論